

Решение
Все вычисления и построения для кулисной части механизма выполняются так же, как для механизма, изображенного на рис. 9, а (см. пример 1).
1. Определим ускорение точки A1
![]() 362
· 0,05 = 64,8 м/с2.
362
· 0,05 = 64,8 м/с2.
2. Определим ускорение точки А3 кулисы ВС. Составим два векторных равенства:
; (13*)
(14*)
В результате вычислений получим:
![]() 2
· 17,4 · 1,47 = 51,16 м/с2;
2
· 17,4 · 1,47 = 51,16 м/с2;
![]() 17,42
· 0,062 =18,77 м/с2,
17,42
· 0,062 =18,77 м/с2,
где ![]() = 31 · 0,002 = 0,062 м; длина отрезка BA
=31 мм получена измерением на плане
механизма.
= 31 · 0,002 = 0,062 м; длина отрезка BA
=31 мм получена измерением на плане
механизма.
Направления
векторов
и
![]() показаны на рис. 10; направление
вектора
показаны на рис. 10; направление
вектора
![]() определено с помощью плана скоростей
(рис. 6, б).
определено с помощью плана скоростей
(рис. 6, б).
Примечание:
в виде исключения при построении плана
ускорений для положения механизма на
участке холостого хода допускается, в
целях экономии места, принимать длину
отрезка
![]() .
Однако следует учесть, что это снижает
точность получаемых результатов.
.
Однако следует учесть, что это снижает
точность получаемых результатов.
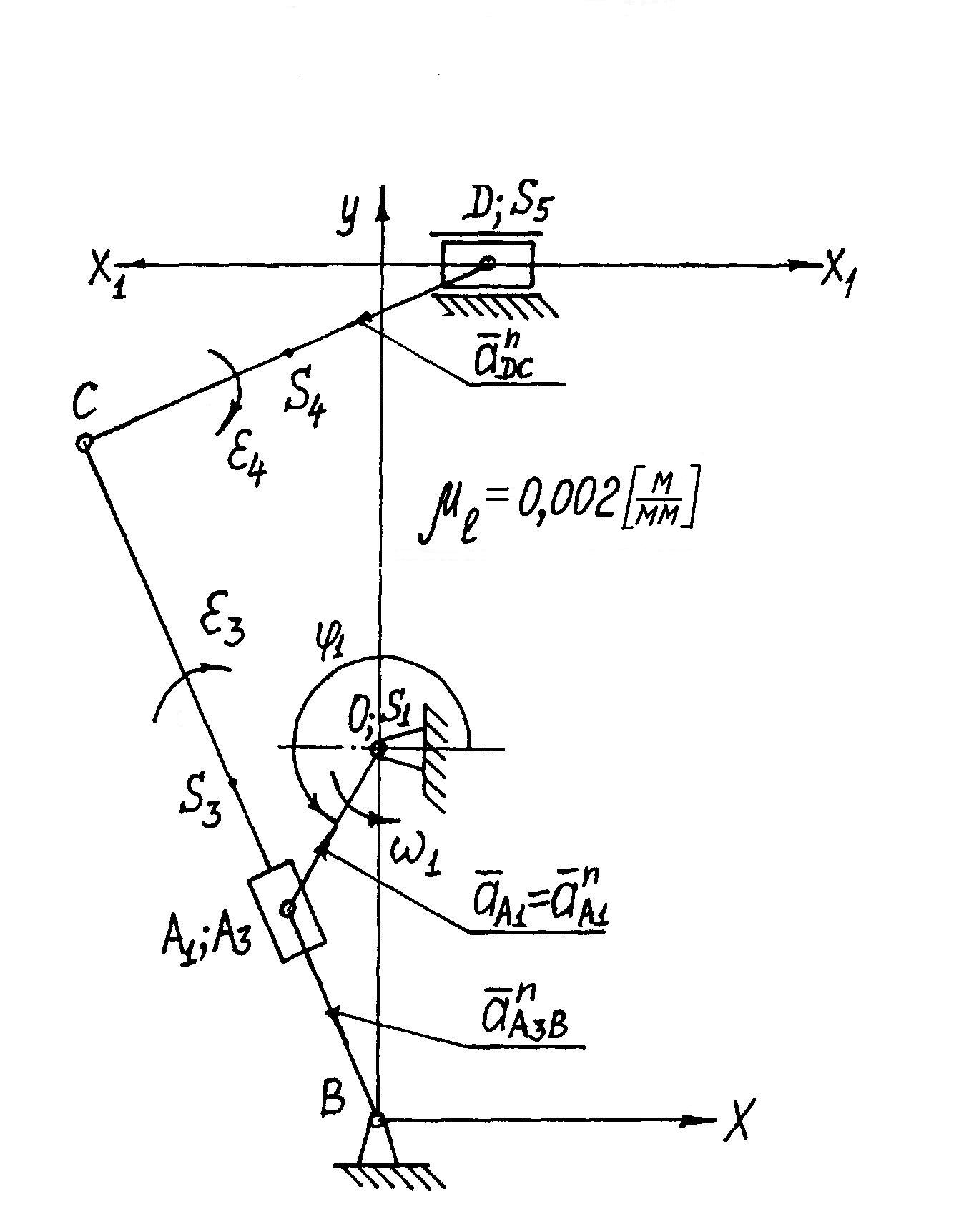
Рис. 10. План положения механизма
3. Определим масштабный коэффициент плана ускорений.
Примем πa1 = 40 мм и по формуле (15) вычислим
μa = 64,8/40 = 1,62 [(м/с2)/мм].
Определим длины векторов, изображающих
на плане ускорений
и
:
![]() = 51,16 / 1,62 =31,5 мм;
= 51,16 / 1,62 =31,5 мм;
![]() 18,77
/1,62 = 11,5 мм.
18,77
/1,62 = 11,5 мм.
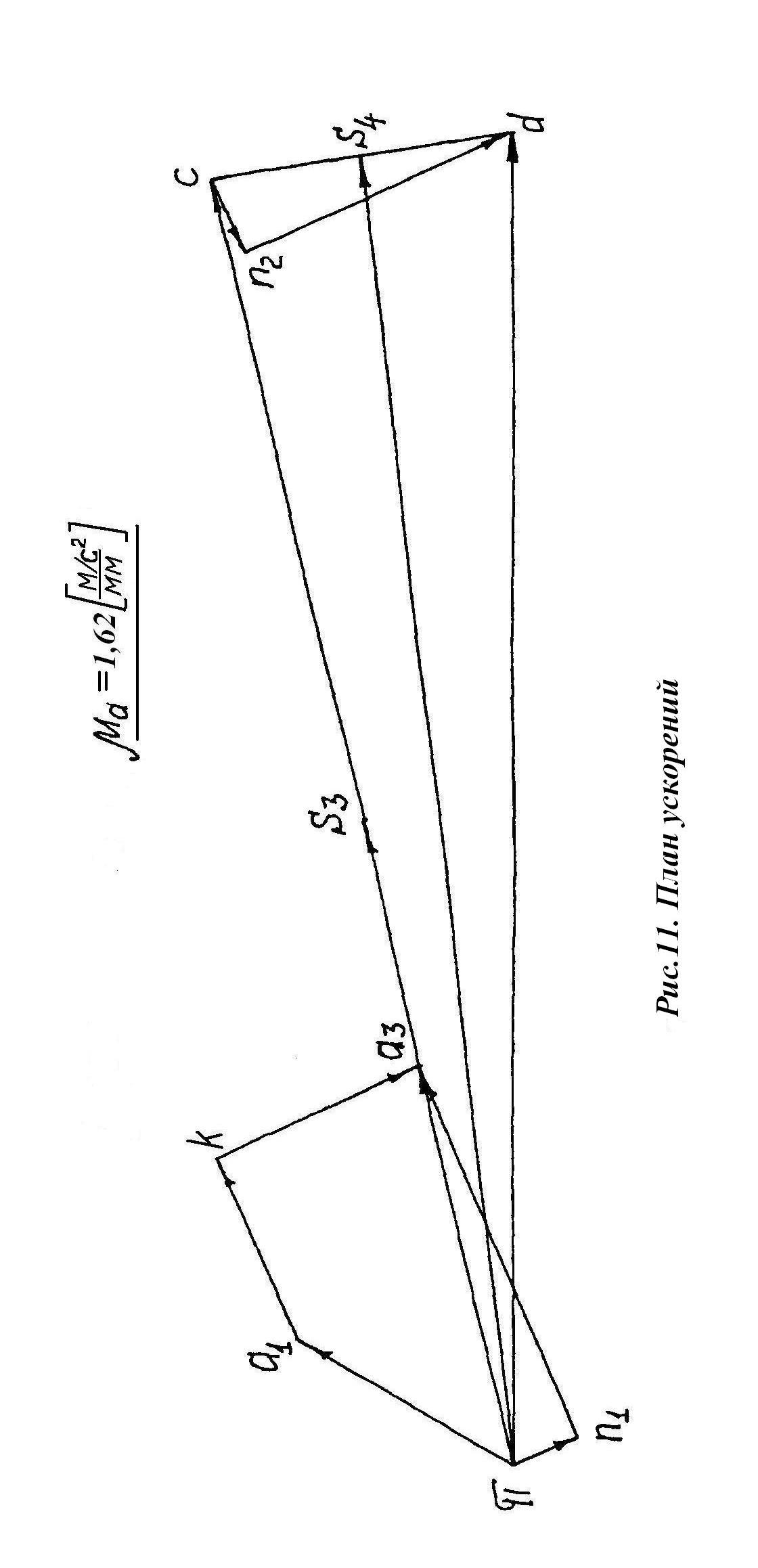
4. На основании равенств (13*) и (14*) проведем построения (рис. 11):
◊ из произвольного полюса π проведем луч, параллельный АО в направлении
вектора (см. рис. 10); отложим на нем отрезок πa1= 40 мм;
◊ из
точки “a1”
проведем луч, перпендикулярный ВС
в направлении
![]()
(см. рис. 6, б) и отложим на нем отрезок a1k = 31,5 мм;
◊ из точки “π ” проведем луч, параллельный ВС в направлении вектора
(см. рис. 10), и отложим на нем отрезок πn1 = 11,5 мм;
◊ через точку “k ” проведем прямую, параллельную ВС (это линия действия вектора ), а через точку n1 – прямую, перпендикулярную ВС
(это
линия действия вектора
![]() ).
На их взаимном пересечении получим
).
На их взаимном пересечении получим
точку
“a3”;
соединив ее с полюсом π,
получим вектор
![]() – ускорение
– ускорение
![]() точки
А3
кулисы в масштабе μa.
точки
А3
кулисы в масштабе μa.
5. Определим ускорение точки С кулисы. Составим пропорцию для плана ускорений (см. пример 1)
![]() =
BC
/BA,
=
BC
/BA,
откуда получим πc = πa3 · BC / BA = 65 · 100 / 31 = 210 мм,
где длина отрезка πa3 = 65 мм получена измерением на плане ускорений (рис. 11); длина отрезка ВА = 31 мм получена измерением на плане положения механизма (рис. 10); длина отрезка ВС = 100 мм получена вычислением при построении плана положения механизма (см § 1.2, пример 2).
Так как на плане положения механизма точки С и А3 расположены по одну сторону от оси вращения В, то и на плане ускорений точки “с” и ”a3 ” должны быть расположены также по одну сторону от полюса π. Следовательно, точка “с” лежит на продолжении πa3. В соответствии с этим на продолжении луча πa3 отложим отрезок πс = 210 мм (рис. 11).
6. Ускорение точки D определим на основании теоремы об ускорениях точек тела (шатуна CD), совершающего плоскопараллельное движение. Составим векторное равенство
![]() ,
(18)
,
(18)
где ![]() – ускорение точки D
относительно точки C
во вращательном движении шатуна CD
вокруг C;
так как это движение неравномерное, то
– ускорение точки D
относительно точки C
во вращательном движении шатуна CD
вокруг C;
так как это движение неравномерное, то
![]() и равенство (18) примет вид
и равенство (18) примет вид
![]() (19)
(19)
где ![]() – нормальное ускорение точки D
в этом движении;
– нормальное ускорение точки D
в этом движении;
![]() – тангенциальное
ускорение точки D
в этом движении.
– тангенциальное
ускорение точки D
в этом движении.
Вектор
направлен вдоль DC
от точки D
к точке C
(см. рис. 10); вектор
перпендикулярен DC;
точка D
одновременно принадлежит звену 5,
совершающему возвратно – поступательное
движение вдоль оси (x
– x1);
следовательно,
вектор
![]() параллелен оси (x
– x1).
параллелен оси (x
– x1).
Численно
![]() = 13, 252
· 0,12
= 21 м / с2.
Вычислим длину вектора
= 13, 252
· 0,12
= 21 м / с2.
Вычислим длину вектора
![]() ,
изображающего на плане ускорений
ускорение
,
изображающего на плане ускорений
ускорение
![]() =
21 / 1,62 = 13 мм.
=
21 / 1,62 = 13 мм.
7. Продолжим построение плана ускорений (рис. 11) .
На
основании равенства (19) из точки “c”
проведем луч, параллельный DC
в направлении вектора
(см. рис. 10), и отложим на нем отрезок
cn2=13
мм;
через точку “n2”
проведем прямую, перпендикулярную DC
(это линия действия вектора
),
а через полюс π
– горизонтальную прямую (это линия
действия вектора
![]() ).
На их взаимном пересечении получим
точку “d”.
Вектор
).
На их взаимном пересечении получим
точку “d”.
Вектор
![]() –
ускорение
точки D
ползуна 5 в масштабе μa.
Соединим на плане ускорений точку “c”
с точкой “d”.
Определим ускорение
–
ускорение
точки D
ползуна 5 в масштабе μa.
Соединим на плане ускорений точку “c”
с точкой “d”.
Определим ускорение
![]() центра
масс шатуна CD.
По условию задачи
центра
масс шатуна CD.
По условию задачи
![]() .
На основании теоремы подобия разделим
отрезок cd
на плане ускорений пополам и соединим
полученную точку “s4”
с полюсом π.
Вектор
.
На основании теоремы подобия разделим
отрезок cd
на плане ускорений пополам и соединим
полученную точку “s4”
с полюсом π.
Вектор
![]() –
ускорение
–
ускорение
![]() в
масштабе μa
.
в
масштабе μa
.
8. Используя масштабный коэффициент μa, вычислим:
◊ ускорение точки D:
![]() 212
· 1,62 = 343,4 м/с2;
212
· 1,62 = 343,4 м/с2;
◊ ускорения центров масс звеньев:
![]() 210
· 1,62 =340,2 м/с2;
210
· 1,62 =340,2 м/с2;
![]() 0,5
· 210 · 1,62 = 170,1 м/с2;
0,5
· 210 · 1,62 = 170,1 м/с2;
◊ угловые ускорения звеньев:
![]() 64
· 1,62 / 0,062 = 1672 рад/с2;
64
· 1,62 / 0,062 = 1672 рад/с2;
![]() 48
· 1,62 / 0,12 = 648 рад/с2,
48
· 1,62 / 0,12 = 648 рад/с2,
где длины
отрезков
![]() и
и
![]() = 48 мм получены измерениями на плане
ускорений;
= 48 мм получены измерениями на плане
ускорений;
![]() = 0,12 м – заданная длина шатуна CD.
= 0,12 м – заданная длина шатуна CD.
Пример 3. Построим план ускорений (рис. 12,б) для третьей модели механизма подачи суппорта строгального станка.
Для решения задачи необходимо предварительно построить план положения и план скоростей механизма.
План положения механизма построен на рис. 12, а. План скоростей механизма построен на рис. 7, б. Методика этих построений была рассмотрена в параграфах 1.1 и 1.2.
Исходные данные: lOA = 0,096 м; lOB = 0,220 м; h = 0,380 м;
lBD = 0,460 м; φ1 = 300; ω1 = 15 рад/с.
По плану скоростей (рис. 7, б) определили:
ω3
= 3,8 рад/с;
![]()
![]()