

Расчёт мощности электродвигателя упрощенного электропривода лебёдки
Рассмотрим расчёт по выборумощности электродвигателя на примере упрощенного электропривода лебёдки, состоящего из электродвигателя , М одноступенчатого редуктора Р и грузового барабана Б (рис. 1.3).
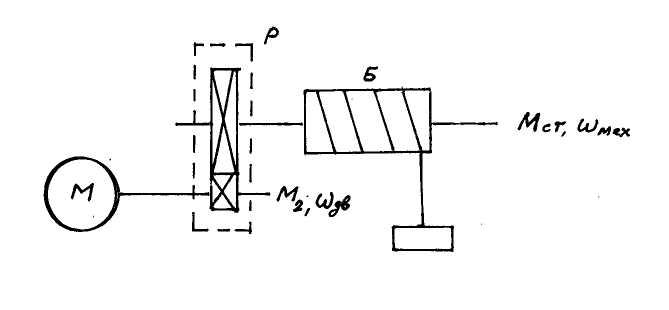
Рис. 1.3. Кинематическая схема электропривода лебёдки: М – электродвигатель, Р – редуктор, Б – грузовой барабан
Пусть
предварительно заданы параметры
механизма и передачи, а именно: статический
момент (сопротитвления) механизма –
М ,
коэффициент полезного действия передачи
–
η
и
передаточное число –
ί.
,
коэффициент полезного действия передачи
–
η
и
передаточное число –
ί.
При работе подьёмника основная часть мощности от двигателя предаётся на грузовой барабан, но её незначительная часть теряется на трение в редукторе и преодоление сил инерции во всех устройствах электропривода.
Мощность на валу электродвигателя
Р = ω
= ω М
М (2-3)
(2-3)
Мощность на валу механизма
Р =
ω
=
ω
 (2-4)
(2-4)
Мощности
Р и Р
и Р связаны
через коэффициент полезного действия
передачи:
связаны
через коэффициент полезного действия
передачи:
 η =
η =
 (2-5)
(2-5)
Подставим в формулу (2-5) правые части формул ( 2-3 ) и ( 2-4 ):
η
=
 (2-6)
(2-6)
Из
выражения (2-6) найдем статический момент
(момент сопротитвления) механизма М (2-7), это тот же статический момент (момент
сопротитвления) механизма
М
(2-7), это тот же статический момент (момент
сопротитвления) механизма
М ,
но приведенный к скорости вала вращения
электродвигателя –
,
но приведенный к скорости вала вращения
электродвигателя –

М =
= =
= ,(2-7),
,(2-7),
М =
= .
.
где:
ί
=
 – передаточное число передачи
(редуктора).
– передаточное число передачи
(редуктора).
Таким
образом статический
момент механизма
– М ,
через кпд –
η передачи
и передаточное число редуктора –
ί,
привели
к
скорости вращения вала двигателя. Для
обеспечения подьёма груза двигатель
должен развивать на валу момент –
М
,
через кпд –
η передачи
и передаточное число редуктора –
ί,
привели
к
скорости вращения вала двигателя. Для
обеспечения подьёма груза двигатель
должен развивать на валу момент –
М равный по величине –
равный по величине –
 .
.
Если
между двигателем и механизмом имеется
несколько передач с передаточными
числами
 ,
, ,….,
,…., и соответствующими КПД
и соответствующими КПД
 ,
, ,...,
,..., ,
то
статический
момент (момент сопротитвления) механизма,
приведенный к скорости вала двигателя,
определяется формулой (2-8)
,
то
статический
момент (момент сопротитвления) механизма,
приведенный к скорости вала двигателя,
определяется формулой (2-8)

Анализ формулы приведенного момента
Для
обеспечения нормальной работы лебёдки
момент –
М на валу электродвигателя должен быть
тем больше, чем больше статический
момент (сопротивленния ) механизма –
М
на валу электродвигателя должен быть
тем больше, чем больше статический
момент (сопротивленния ) механизма –
М
 и чем меньше к.п.д. – η
и
передаточное число – ί
передачи (с уменьшением скорости
двигателя
и чем меньше к.п.д. – η
и
передаточное число – ί
передачи (с уменьшением скорости
двигателя
 ,
передаточное число –ί
уменьшается).
,
передаточное число –ί
уменьшается).
По
моменту –
М по (формуле 2-3) определяем необходимую
мощность двигателя и выбираем двигатель
по каталогу.
по (формуле 2-3) определяем необходимую
мощность двигателя и выбираем двигатель
по каталогу.
Приведение моментов инерции к одной оси вращения
Как было указано выше часть мощности двигателя теряется на преодоление суммарного приведенного момента инерции во всех устройствах электропривода.
Приведение всех моментов инерции электропривода к одной оси вращения основано на том, что суммарный запас кинетической энергии движущихся частей электропривода, отнесённых к одной оси, остаётся неизменным (постоянным).
Из
курса механики известно, что кинетическая
энергия –
 при вращательном движении
пропорциональна моменту инерции –
при вращательном движении
пропорциональна моменту инерции – и угловой скорости –ω
и угловой скорости –ω
 .
(2-10)
.
(2-10)
Если
в электроприводе имеются вращающиеся
части с моментами инерции –
 ,
, ,
, ,
, и угловыми скоростями –ωдв,
ω1
,ω2,
ωn,
то их динамическое действие можно
заменить действием одного эквивалентного,
суммарного момента инерции –
и угловыми скоростями –ωдв,
ω1
,ω2,
ωn,
то их динамическое действие можно
заменить действием одного эквивалентного,
суммарного момента инерции –
 ,
приведенного к скорости вращения вала
двигателя
,
приведенного к скорости вращения вала
двигателя
 .
(2-11)
.
(2-11)
Из
(2-11) найдём эквивалентный суммарный
момент
инерции
–
 ,приведенный
к скорости вращения вал двигателя
,приведенный
к скорости вращения вал двигателя
 (2-12)
(2-12)
Где
 –
суммарный момент инрции ротора двигателя
и других вращающихся элементов (муфты,
шестерни и т.п.), установленных на валу
двигателя.
–
суммарный момент инрции ротора двигателя
и других вращающихся элементов (муфты,
шестерни и т.п.), установленных на валу
двигателя.