

II частина.
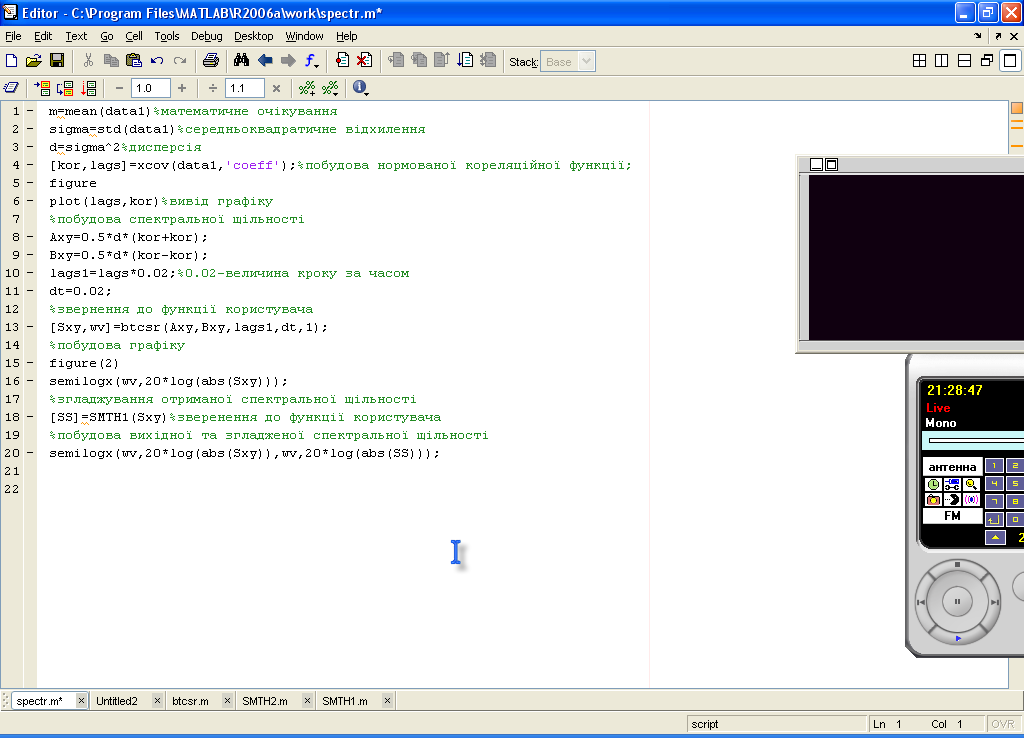
За допомогою Matlab отримати графіки реалізацій, кореляційної функції та спектральної густини випадкового процесу за експериментальними даними згідно варіанту. Вихідні дані для отримання кореляційної та спектральної густини знаходяться в файлі. При виконанні розрахунків використовуються наступні функції користувача: btcsr – для обчислення крос-спектру функції відповідно з алгоритмом Блекмена – Т’юкі; SMTH1 – згладження в частотній області вікном Хемінга. Для розрахунку кореляційної функції та спектральної густини випадкового процесу за експериментальними даними необхідно створити m – файл (див. приклад).
Приклад
Перед початком роботи необхідно обов’язково завантажити з папки з варіантами масив даних та масив часу в робочу область Matlab.
Контрольні запитання:
Що таке випадковий сигнал?
Що таке кореляційна функція?
Як обчислити кореляційну функцію випадкового сигналу?
Які числові характеристики випадкових сигналів ви знаєте?
Як визначити спектральну щільність випадкового сигналу?
Що таке «білий шум»?
Лабораторна робота № 5 Моделювання пристроїв за допомогою Simulink
Мета роботи: вивчити основи Simulink, правила створення моделей в Simulink, правила моделювання в Simulink, ієрархічну бібліотеку Simulink, розробити структуру моделі пристрою для варіанта завдання.
Короткі теоретичні відомості.
Програма Simulink є додатком до пакета MATLAB. При моделюванні з використанням Simulink реалізується принцип візуального програмування, відповідно до якого, користувач на екрані з бібліотеки стандартних блоків створює модель пристрою і здійснює розрахунки. При цьому, на відміну від класичних способів моделювання, користувачеві не потрібно досконально вивчати мову програмування і чисельні методи математики, а досить загальних знань, які необхідні при роботі на комп'ютері і, природно, знань тієї предметної області в якій він працює.
Simulink є досить самостійним інструментом MATLAB і при роботі з ним зовсім не потрібно знати сам MATLAB і інші його додатки. З іншої сторони доступ до функцій MATLAB та інших його інструментів залишається відкритим і їх можна використати в Simulink. При роботі з Simulink користувач має можливість модернізувати бібліотечні блоки, створювати свої власні, а також складати нові бібліотеки блоків.
При моделюванні користувач може вибирати метод вирішення диференціальних рівнянь, а також спосіб зміни модельного часу (з фіксованим або змінним кроком). У ході моделювання є можливість стежити за процесами, що відбуваються в системі. Для цього використовуються спеціальні пристрої спостереження, що входять до складу бібліотеки Simulink. Результати моделювання можуть бути представлені у вигляді графіків або таблиць.
Завдання для виконання.
Завдання 1. Проста модель пристрою відповідно до варіанта завдання.
- Створити модель. У ній сигнал від джерела надходить на функціональний блок. Реєстратор із двома входами дозволяє спостерігати сигнали на вході і виході функціонального блоку.
- Провести її моделювання.
Завдання 2. Розширена модель пристрою відповідно до варіанта завдання.
- Створити модель. У ній до моделі завдання 1 додається паралельна гілка із другим функціональним блоком. Реєстратор із трьома входами дозволяє спостерігати сигнали на входах і виходах функціональних блоків.
- Провести її моделювання.
Завдання 3. Модель системи зв'язку із заданими типами модуляції і перешкод:
- Створити модель. У ній сигнал від джерела надходить на модулятор. Вихідний сигнал модулятора передається в канал зв'язку, де на нього накладається адитивний шум. Вихід каналу зв'язку надходить на демодулятор. Реєстратор з п'ятьма входами дозволяє спостерігати сигнали в різних точках системи.
- Провести її моделювання.
Методика виконання завдань 1, 2.
1. Модель пристрою містить джерело сигналу, функціональні блоки і засоби спостереження за поведінкою системи (дисплей, чисельний індикатор і ін.).
2. У всіх варіантах завдання потрібно використовувати дисплей з одним входом у завданні 1 та з двома входами в завданні 2.
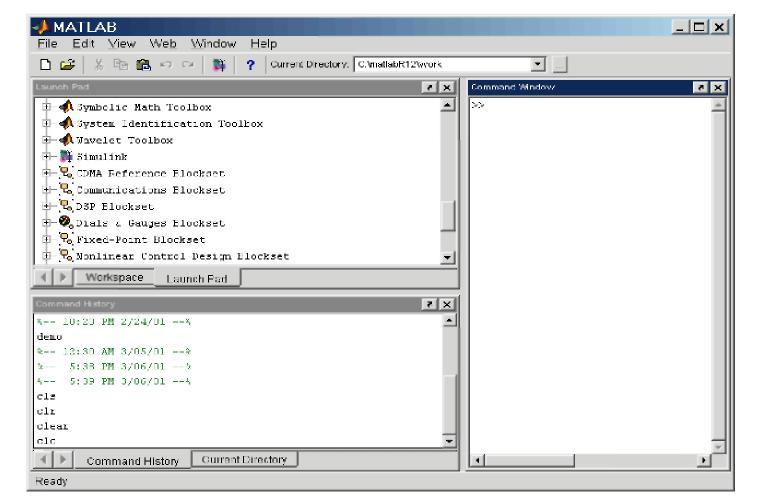
3. Перша дія - запустити Matlab. При цьому виникає стартове діалогове вікно, яке містить три вбудовані вікна: Command Window (командне) - праворуч, Launch Pad (Засоби запуску) - у лівому верхньому куті, Command Hustory (Історія команд) - у лівому нижньому куті.
4. Для створення моделі потрібно виконати дію File => New => Model. Це приводить до запуску програми Simulink, яка створює порожнє вікно моделі.
5. Далі потрібно викликати браузер бібліотеки компонентів, використовуючи меню або кнопку в панелі інструментів Library Brouser. Вікно браузера містить дві панелі: ліворуч ієрархічне дерево бібліотеки, праворуч - вміст обраної в лівій панелі папки із блоками. У папці можуть бути підбібліотеки і блоки. Кожен блок і підбібліотека мають візуальний семантичний образ і напис.

6. Розмістіть вікна браузера й моделі таким чином, щоб вони не перекривали один одного. Тепер можна формувати модель візуальним методом.
7. Скопіюйте мишею із браузера у вікно моделі потрібні блоки. При перенесенні блоку в модель там створюється екземпляр блоку з іменем, що збігаються з написом під блоком ( при необхідності, коли однотипних блоків у моделі декілька, в ім'я блоку додається номер).
8. З'єднайте блоки конекторами. Для цього потрібно перемістити мишку від однієї точки, що з'єднується, до іншої. При відпусканні кнопки миші в моделі відображається конектор із стрілкою.
9. Установіть для кожного блоку властивості. Для цього потрібно на блоці зробити подвійне клацання мишкою, що призведе до появи вікна із властивостями блоку. Установіть потрібні властивості в полях вікна.
Приклад виконання
Завдання
Завдання 1. Двосторонній обмежувач синусоїдального сигналу.
- Створити модель.
- Провести її моделювання.
Завдання 2. Двосторонній обмежувач синусоїдального сигналу і блок мертвої зони
- Створити модель.
- Провести її моделювання.
Завдання 1
1. Створити на екрані дисплея порожнє вікно моделі і викликати браузер бібліотеки блоків.
2. Відкрити в браузері папку із блоками джерел, використовуючи кнопку підбібліотеки Sources (Джерела). З підбібліотеки Sources лівою кнопкою миші перетягнути у вікно моделі блок Sine Wave (генератор синусоїди) і там відпустити в зручному місці.
3. Подвійним клацанням по блоку Sine Wave у моделі викликати вікно із властивостями блоку. У його полях вибрати параметри. У цьому випадку встановити амплітуду і частоту (фазу й час відліку можна не міняти).
4. Відкрити в браузері вікно нелінійних блоків, використовуючи кнопку підбібліотеки Nonlinear (Нелінійні). З підбібліотеки Nonlinear лівою кнопкою миші перетягнути у вікно моделі блок Saturation (обмежувач) і там відпустити в зручному місці.
5. Подвійним клацанням по блоку Saturation у моделі викликати вікно із властивостями блоку. У ньому встановити верхню і нижню границі обмеження.
6. Відкрити в браузері вікно блоків реєстраторів, використовуючи кнопку підбібліотеки Sinks (Реєстратори). З підбібліотеки Sinks лівою кнопкою миші перетягнути у вікно моделі блок Scope і там відпустити в зручному місці.
7. Подвійним клацанням по блоку Scope у моделі викликати його демонстраційне вікно. Розмістити це вікно на екрані в зручнім місці, переміщаючи його за заголовок лівою кнопкою миші.
8. Кнопкою Properties (Властивості) вікна Scope викликати вікно властивостей, у якому установити число осей 2 ( для вхідного і вихідного сигналів обмежувача).
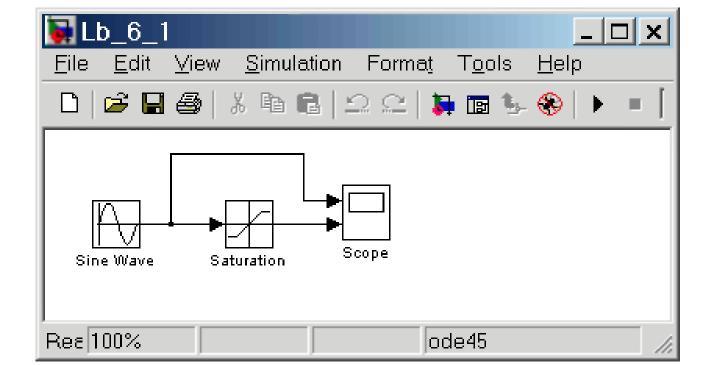
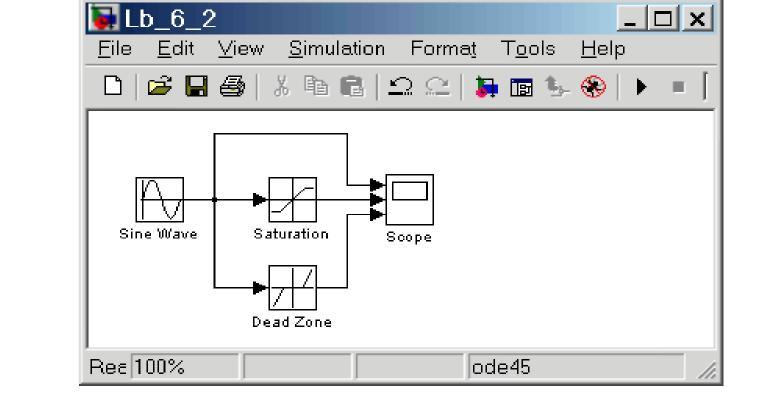
9. Лівою (або правою) кнопкою миші з'єднати блоки. При натиснутій лівій кнопці курсор має форму хрестика, який треба позиціонувати по позначених входах і виходам блоків. Почати треба з позначеного виходу одного блоку і відпустити кнопку на позначеному вході іншого. Перший вхід реєстратора з'єднати із входом обмежувача, другий - з виходом.
10. Результат - модель пристрою і порожнє вікно реєстратора.
11. Включити симулювання (моделювання) командою Simulation => Start (або кнопкою на панелі інструментів моделі). У вікні Scope відображаються графіки сигналів.
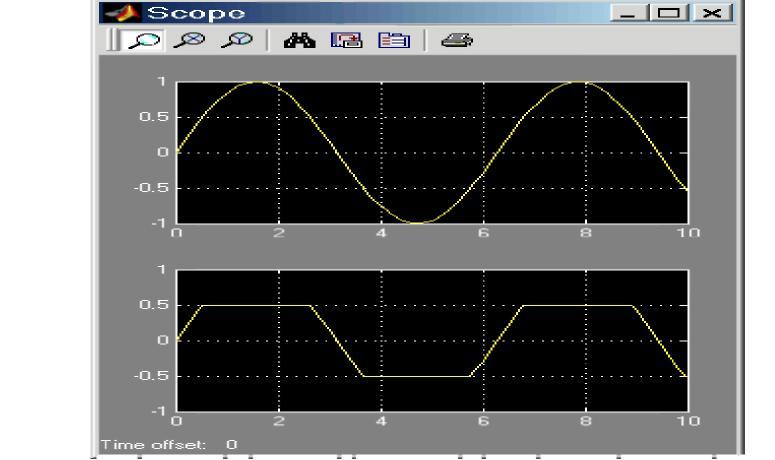
Якщо результат не збігається з очікуваним, то потрібно змінити параметри моделі. Команда Simulation => Simulation parameters викликає вікно параметрів моделі, у якому можна зробити зміни. Можна регулювати параметри, розміщені на 5 вкладках:
- Solver - вирішувач (час початку і кінця, покроковий або безперервний режим, використовуваний математичний метод, крок моделювання, погрішності обчислень та ін.).
- Workspace I/O - робоча область (параметри завантаження і збереження, опції зберігання).
- Diagnostics - діагностика (параметри та області, опції конфігурації, дії).
- Advanced – додаткові опції (ознаки оптимізації).
- Real-Time Workshop - робота в реальному часі
12. Якщо графік вийшов у незручному масштабі, то масштаб можна змінити. Для цього краще вибрати режим Autoscale (автомасштабування) у локальному меню.
Завдання 2
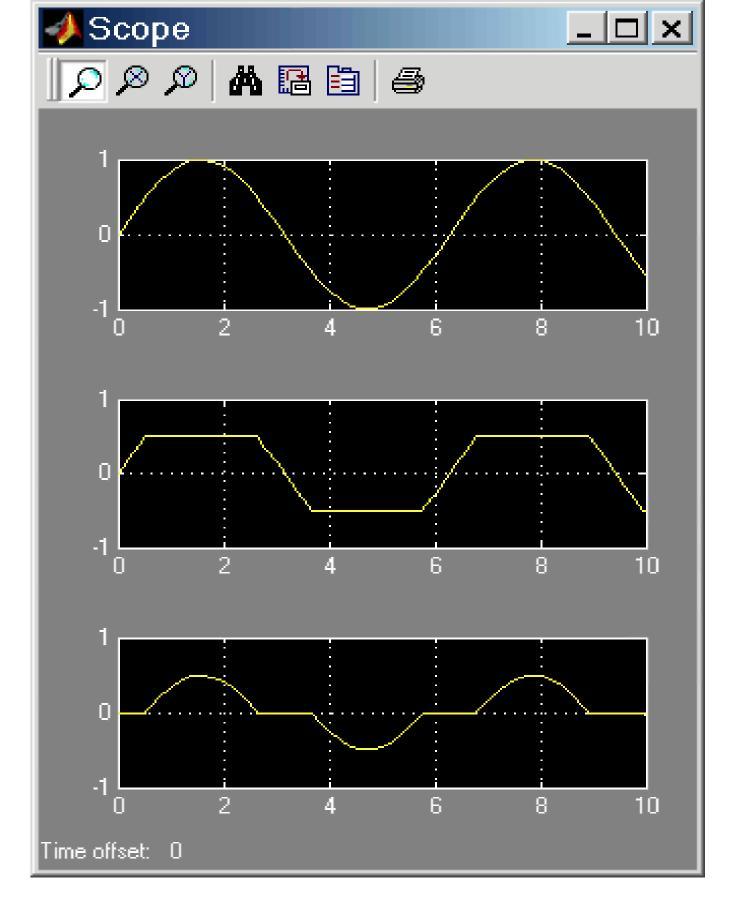
1. Додамо в модель у паралельну гілку блок Dead Zone (Мертва зона). Установимо його параметри.
2. В реєстраторі Scope змінимо число осей на 3.
3. З'єднаємо третій вхід Scope з виходом Dead Zone. З'єднаємо вхід Dead Zone з виходом Sine Wave.
4. Виконуємо моделювання. У вікні Scope графіки вихідних сигналів.
Завдання 3.
Створити модель аналогової системи передачі з амплітудною модуляцією по каналу зв'язку з гаусовим шумом.
Розв'язання
1. Створити на екрані дисплея порожнє вікно моделі і викликати браузер бібліотеки блоків.
2. Відкрити в браузері папку із блоками джерел, використовуючи кнопку підбібліотеки Sources (Джерела). З підбібліотеки Sources лівою кнопкою миші перетягнути у вікно моделі блок Sine Wave (генератор синусоїди) і там відпустити в зручному місці.
3. Подвійним клацанням по блоку Sine Wave у моделі викликати вікно із властивостями блоку. У його полях вибрати параметри. У цьому випадку встановити амплітуду і частоту (фазу й час відліку можна не міняти).
4. Вибрати в браузері папку Communications Blockset (Комунікаційні блоки).
5. У ньому відкрити папку Modulation (Модуляція), а в ній папку Analog Passband Modulation (Аналогова смугова модуляція).
6. З підбібліотеки Analog Passband Modulation лівою кнопкою миші перетягнути у вікно моделі блок DSB AM Modulator Passband (Модулятор двосмугової АМ зі смуговим фільтром) і там відпустити в зручному місці.
7. Аналогічно скопіювати у вікно моделі блок DSB AM Demodulator Passband (Демодулятор двосмуговий АМ зі смуговим фільтром).
8. Подвійним клацанням по блоку Saturation у моделі викликати вікно із властивостями блоку. У ньому встановити верхній і нижній межі обмеження.
9. Вибрати в браузері папку Communications Blockset. У ньому відкрити папку Comm Sources (Комунікаційні джерела).
10. З підбібліотеки Comm Sources лівою кнопкою миші перетягнути у вікно моделі блок Gaussian Noise Generator (Генератор гаусового шуму) і там відпустити в зручному місці.
11. Вибрати в браузері папку Simulink. У ній відкрити папку Functions & Tables (Функції і таблиці).
12. З підбібліотеки Functions & Tables лівою кнопкою миші перетягнути у вікно моделі блок Fcn (Функція) і там відпустити в зручному місці. Цей блок вводить функцію перетворення u(1) векторного виходу блоку Gaussian Noise Generator у скаляр. Для завдання функції відкрийте вікно властивостей блоку подвійним клацанням по ньому і уведіть u(1) у поле функції.
13. Вибрати в браузері папку Simulink. У ній відкрити папку Math (Математика).
14. З підбібліотеки Math лівою кнопкою миші перетягнути у вікно моделі блок Gain (Підсилення) і там відпустити в зручному місці. Цей блок буде використаний для завдання рівня шуму в каналі зв'язку.
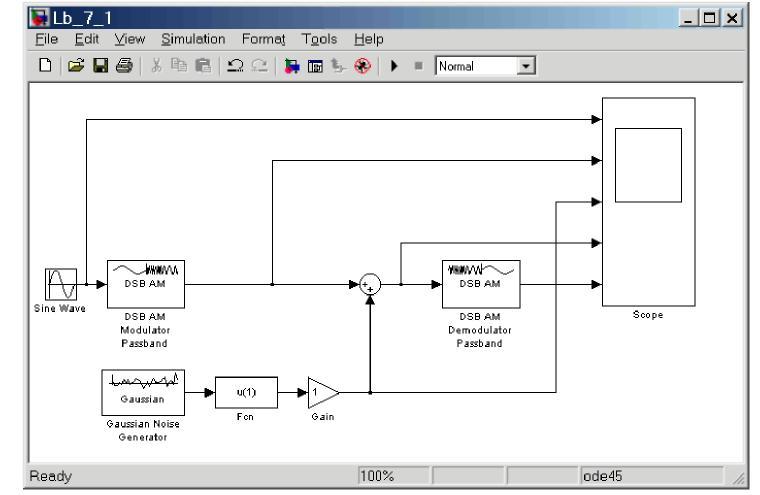
15. З підбібліотеки Math лівою кнопкою миші перетягнути у вікно моделі блок Sum (Суматор) і там відпустити в зручному місці. Цей блок буде використаний для додавання сигналів у каналі зв'язку.
16. .Вибрати в браузері папку Simulink. У ній відкрити папку реєстраторів Sinks ( Реєстратори). З підбібліотеки Sinks лівою кнопкою миші перетягнути у вікно моделі блок Scope і там відпустити в зручному місці.
17. Подвійним клацанням по блоку Scope у моделі викликати його демонстраційне вікно. Розмістити це вікно на екрані в зручному місці, переміщаючи його за заголовок лівою кнопкою миші.
18. Кнопкою Properties (Властивості) вікна Scope викликати вікно властивостей, у якому установити число осей 5.
19. Лівою (або правою) кнопкою миші з'єднати блоки. При натиснутій лівій кнопці курсор має форму хрестика, який треба позиціонувати по позначених входах і виходам блоків. Почати треба з позначеного виходу одного блоку і відпустити кнопку на позначеному вході іншого. Входи реєстратора з'єднувати з вузлами моделі, в яких діють сигнали, зазначені вище і у тому ж порядку.
20. Результат - модель пристрою і порожнє вікно реєстратора.
21. Включити симулювання (моделювання) командою Simulation => Start (або кнопкою на панелі інструментів моделі). У вікні Scope відображаються графіки сигналів.
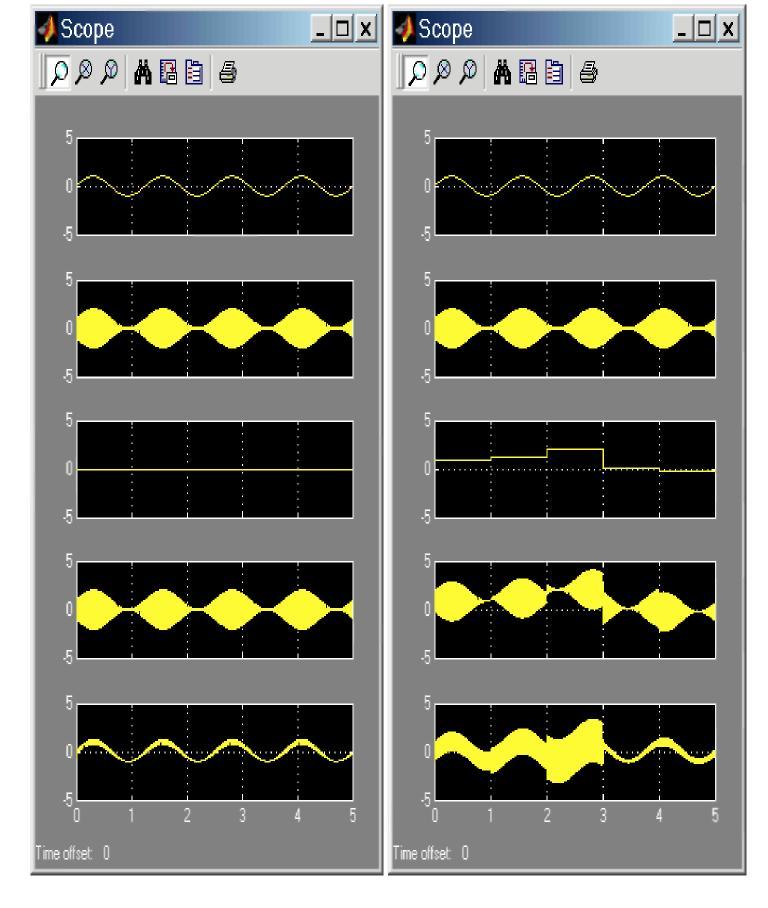
22. Здійснити моделювання для двох випадків
- Перешкод немає. Для цього встановити коефіцієнт підсилення в блоці Gain, рівним нулеві.
- Перешкода є. Для цього встановити коефіцієнт підсилення блоку Gain відмінним від нуля. Регулюючи це значення можна простежити за поведінкою системи в різних умовах. Нижче наведені результати моделювання без перешкод (ліворуч) і з перешкодами (праворуч).
На наведених графіках вихідний сигнал демодулятора містить залишковий високочастотний компонент. Це пов'язане з використанням у демодуляторі не дуже якісного фільтра.
Завдання для самостійного виконання.
Варіанти для завдань 1, 2
|
№
|
Джерело сигналу |
Блоки | |
|
Перший |
Додатковий | ||
|
1 |
Sine Wave Синусоїда |
Gain Підсилення |
Derivate Диференціатор |
|
2 |
Pulse Generator Імпульси |
Saturation Обмежувач |
Integrator Інтегратор |
|
3 |
Repeating Sequence Пила |
Quantizer Квантизатор |
Gain Підсилення |
|
4 |
Ram Лінійно наростаючий |
Derivate Диференціатор |
Saturation Обмежувач |
|
5 |
Chirp Signal Змінної частоти |
Integrator Інтегратор |
Quantizer Квантизатор |
|
6 |
Sine Wave Синусоїда |
Transport delay Затримка |
Derivate Диференціатор |
|
7 |
Pulse Generator Імпульси |
Dead Zone Мертва зона |
Integrator Інтегратор |
|
8 |
Repeating Sequence Пила |
Gain Посилення |
Transport delay Затримка |
|
9 |
Ram Лінійно наростаючий |
Saturation Обмежувач |
Dead Zone Мертва зона |
|
10 |
Chirp Signal Змінної частоти |
Quantizer Квантизатор |
Gain Посилення |
|
11 |
Sine Wave Синусоїда |
Derivate Диференціатор |
Saturation Обмежувач |
|
12 |
Pulse Generator Імпульси |
Integrator Інтегратор |
Quantizer Квантизатор |
|
13 |
Repeating Sequence Пила |
Transport delay Затримка |
Derivate Диференціатор |
|
14 |
Ram Лінійно наростаючий |
Dead Zone Мертва зона |
Transport delay Затримка |
|
15 |
Chirp Signal Змінної частоти |
Derivate Диференціатор |
Saturation Обмежувач |
У таблиці назви функціональних блоків дані українською та англійською мовами (так, як вони названі в браузері бібліотеки блоків Simulink).
Варіанти для завдання 3
|
№ |
Тип модуляції |
Тип генератора перешкоди |
|
1 |
DSB AM Passband Двосмугова амплітудна |
Rician Noise Generator Райєсовський шум |
|
2 |
DSBSC AM Passband Балансова амплітудна |
Rayleigh Noise Generator Релейєвський шум |
|
3 |
SSB AM Passband Односмугова амплітудна |
Uniform Noise Generator Нормальний шум |
|
4 |
FM Passband Частотна |
Gaussian Noise Generator Гаусов шум |
|
5 |
PM Passband Фазова |
Rician Noise Generator Райєсовський шум |
|
6 |
DSB AM Passband Двосмугова амплітудна |
Rayleigh Noise Generator Релейєвський шум |
|
7 |
DSBSC AM Passband Балансова амплітудна |
Uniform Noise Generator Нормальний шум |
|
8 |
SSB AM Passband Односмугова амплітудна |
Gaussian Noise Generator Гаусов шум |
|
9 |
FM Passband Частотна |
Rician Noise Generator Райєсовський шум |
|
10 |
PM Passband Фазова |
Rayleigh Noise Generator Релейєвський шум |
|
11 |
DSB AM Passband Двосмугова амплітудна |
Uniform Noise Generator Нормальний шум |
|
12 |
DSBSC AM Passband Балансова амплітудна |
Gaussian Noise Generator Гаусов шум |
|
13 |
SSB AM Passband Односмугова амплітудна |
Rician Noise Generator Райєсовський шум |
|
14 |
FM Passband Частотна |
Rayleigh Noise Generator Релейєвський шум |
|
15 |
PM Passband Фазова |
Uniform Noise Generator Нормальний шум |
Контрольні питання
1. Призначення Simulink.
2. Правила побудови моделей в Simulink.
3. Правила моделювання в Simulink.
4. Структура ієрархічної бібліотеки Simulink.
5. Блоки з папки Continuous бібліотеки Simulink.
6. Блоки з папки Discrete бібліотеки Simulink.
7. Блоки з папки Functions & Tables бібліотеки Simulink.
8. Блоки з папки Math бібліотеки Simulink.
9. Блоки з папки Nonlinear бібліотеки Simulink.
10. Блоки з папки Signal & Systems бібліотеки Simulink.
11. Блоки з папки Sources бібліотеки Simulink.
12. Блоки з папки Sinks бібліотеки Simulink.
13. Блоки з Communication Blockset.
14. Блоки з DSP Blockset.
16. Блоки з Communication Blockset.