

25. Расчет входных и выходных фильтров силовых преобразователей электроэнергии.
В
качестве фильтров применяются пассивные
четырехполюсники, содержащие индуктивные
и емкостные элементы, основным показателем
эффективности фильтра является
коэффициент фильтрации энной гармоники.
![]() - это отношение амплитуды энной гармоники
(3,5,7…) на входе и на выходе фильтра.
- это отношение амплитуды энной гармоники
(3,5,7…) на входе и на выходе фильтра.
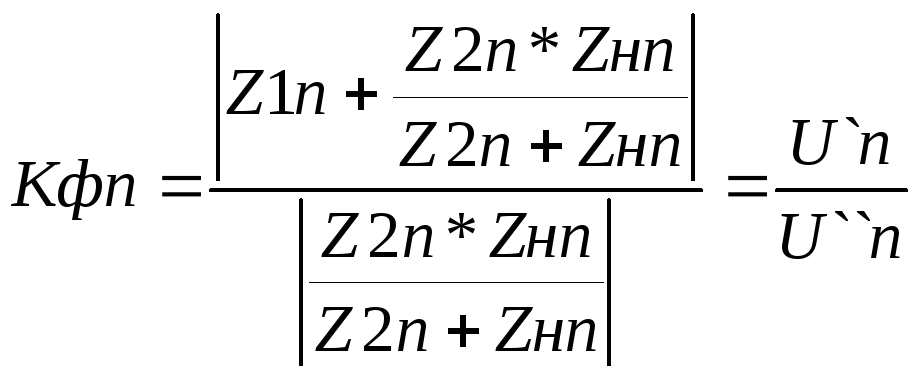
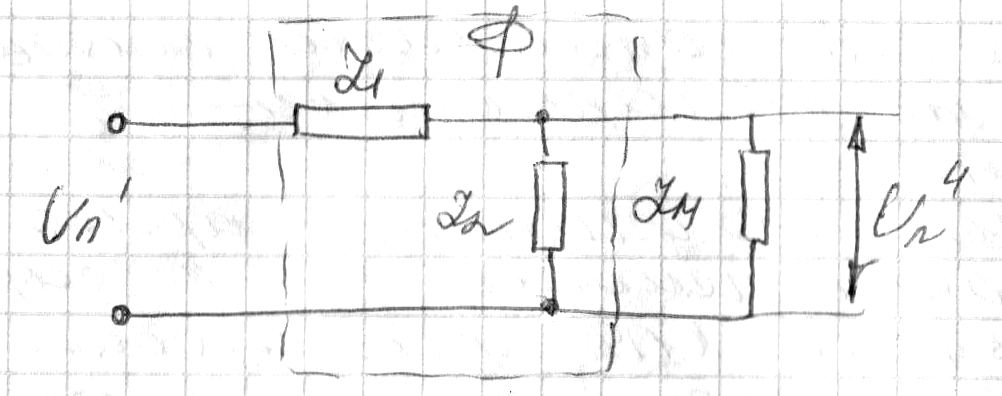
Р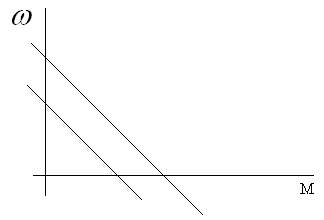 асчетное
соотношение для любого фильтра можно
получить из следующей схемы замещения.
асчетное
соотношение для любого фильтра можно
получить из следующей схемы замещения.
Z1 и Z2 – полное сопротивление элемента фильтра.
Zн – полное сопротивление нагрузки.
Принцип действия фильтра основан на том, что сопротивление Z1 должно быть велико а Z2 малым (чтобы не шло на нагрузку).
Коэффициент фильтрации н – й гармоники получается, если рассматривать фильтр как делитель напряжения.
Для повышения коэффициента фильтрации может применятся последовательное соединение фильтров. При этом общий коэф. Фильтрации отдельных фильтров.
![]()
Ч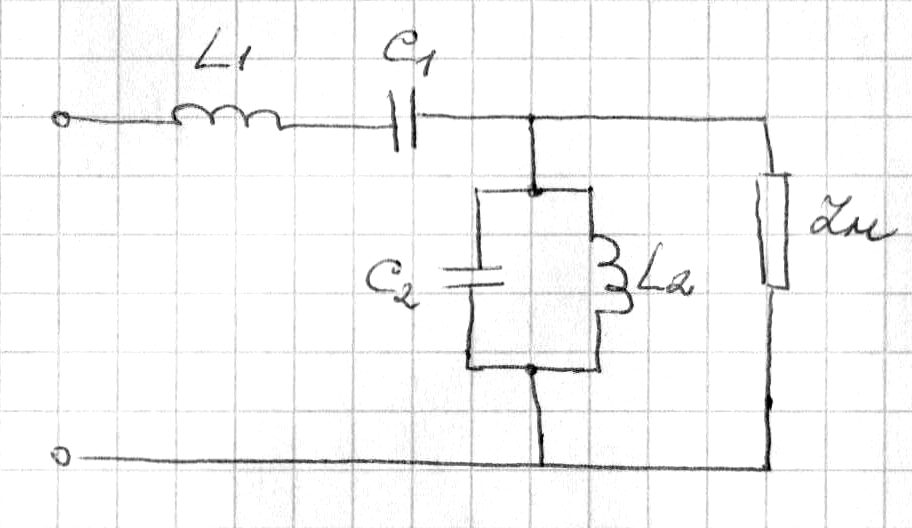 астные
случаи:
астные
случаи:
1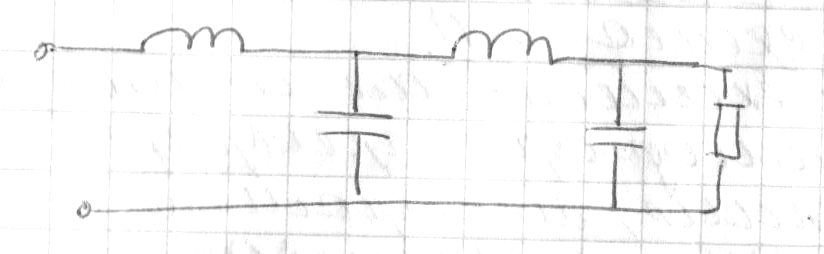 ).
Индуктивный фильтр (реактор)
).
Индуктивный фильтр (реактор)
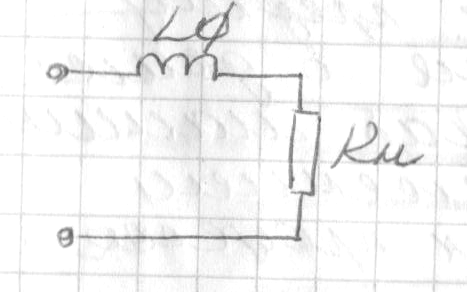
![]()
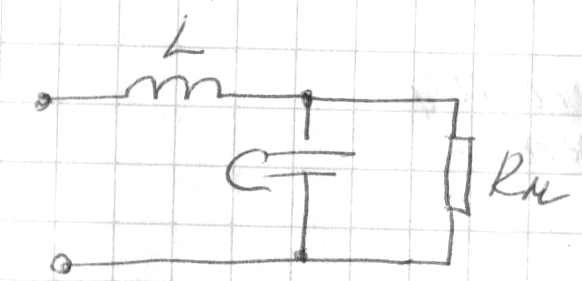
2) LC – фильтр
![]()
Необходимо чтобы частота резонанса фильтра была неравна частоте сети:
![]()
3)Наиболее эффективными являются резонансные фильтры.
Н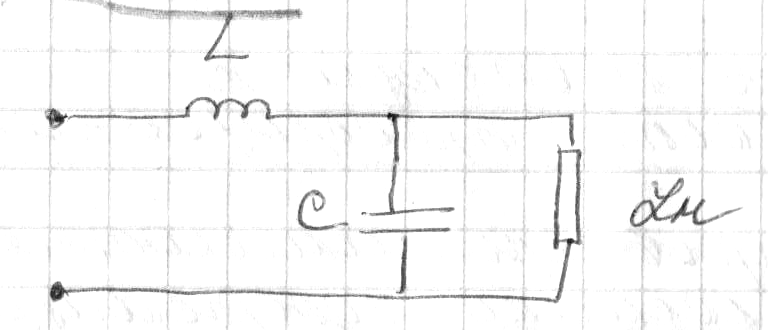 аиболее
широко применяютсяLC
–
фильтры, но их недостатками являются:
ослабление первой гармоники и изменение
фазы выходного напряжения. Поэтому для
подавления высокочастотных гармоник
в сети без ослабления первой гармоники
применяются резонансные фильтры по
следующим схемам.
аиболее
широко применяютсяLC
–
фильтры, но их недостатками являются:
ослабление первой гармоники и изменение
фазы выходного напряжения. Поэтому для
подавления высокочастотных гармоник
в сети без ослабления первой гармоники
применяются резонансные фильтры по
следующим схемам.
![]()
Частота резонанса должна быть равной частоте первой гармоники.
Последовательный контур L1 C1 не оказывает сопротивление первой гармоники, и создает высокое сопротивление для высоких гармоник.
Параллельный контур L2 C2 имеет малое сопротивление для высоких гармоник и большое для первой гармоники.
Недостаток: большие масса и габариты конденсатора C1 и индуктивности L2 при f = 50 Гц.
Лучшими характеристиками обладает схема:
![]()
В данной схеме контур L1 C1 настроен на первую гармонику, L3 C3 - на 3 – ю, L5 C5 на 5 – ю гармонику напряжения, более высокие гармоники фильтруются конденсатором Cn.
Точный расчет параметров фильтров производится на компе.
26 Статические характеристики и режимы работы электропривода постоянного тока с зависимым возбуждением.
З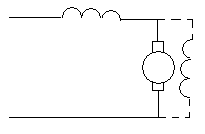
 ависимое
возбуждение–
это последовательное или смешанное
возбуждение, когда ток возбуждения
зависит от тока якоря.
ависимое
возбуждение–
это последовательное или смешанное
возбуждение, когда ток возбуждения
зависит от тока якоря.
Двигатели с таким возбуждением имеют большой пусковой момент при той же мощности и широко применяются на транспорте.
1. Статические характеристики.
М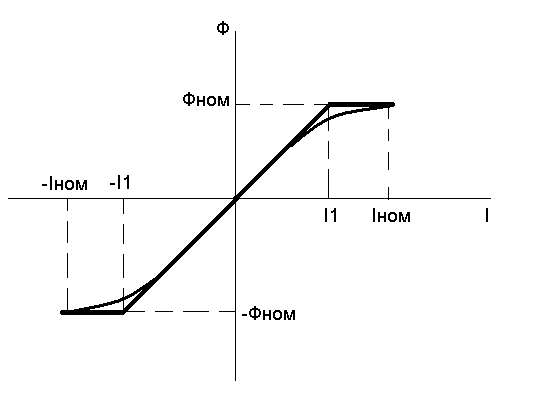 агнитный
поток возбуждения становится функцией
тока якоря.
агнитный
поток возбуждения становится функцией
тока якоря.
Рассмотрим кривую намагничивания.
Для получения наиболее высокого КПД и малых габаритов Iном и Фном выбираются на границе насыщения.
Реальная кривая намагничивания для получения статических характеристик заменяется отрезками прямых линий.
На
участке от –I1
до
I1
![]() .
Вне участка
.
Вне участка![]() ,
и статические характеристики соответствуют
характеристикам машины независимого
возбуждения.
,
и статические характеристики соответствуют
характеристикам машины независимого
возбуждения.
Получим статические характеристики для машины с последовательным возбуждением.
-
электромеханическая
![]() ,
,![]() ,
где
,
где![]() ,
,![]() (*)
(*)
-
механическая
![]() ,
,![]() ,
подставляем (*):
,
подставляем (*):![]() .
.
Естественные
статич х-ки снимаются при
![]() и отсутствии доб. сопротивления.
и отсутствии доб. сопротивления.
![]() -
естественная х-ка,
-
естественная х-ка,
![]() -
искусственная х-ка.
-
искусственная х-ка.
При
уменьшении ЭДС преобразователя и
введении добавочного сопротивления
получаются искусственные хар-ки, которые
проходят ниже естественных
![]() .
.
2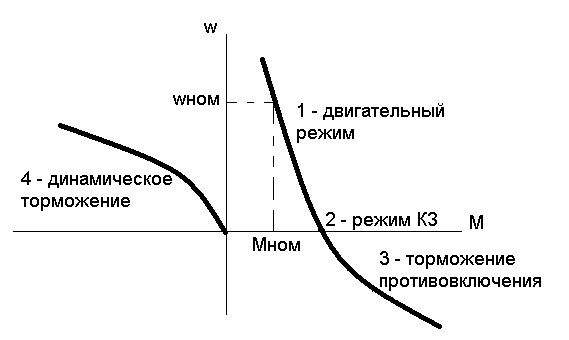 .Режимы
работы.
.Режимы
работы.
Нет
режима ХХ и рекуперативного торможения,
что обусловлено тем, что при увеличении
скорости
![]() уменьшается ток и магнитный поток.
уменьшается ток и магнитный поток.![]() может вырасти до бесконечности, т.е., до
поломки двигателя, если нет момента
сопротивления на валу.
может вырасти до бесконечности, т.е., до
поломки двигателя, если нет момента
сопротивления на валу.
Д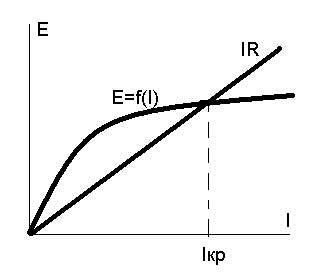
 ля
динамического торможения двигатель
отключается от преобразователя, и цепь
якоря замыкается на дополнительный
резистор. Под действием ЭДС якоря
проходит ток и возникает тормозной
электромагнитный момент. Для того, чтобы
возникло самовозбуждение двигателя,
сопротивление цепи якоря должно быть
меньше критического значения
ля
динамического торможения двигатель
отключается от преобразователя, и цепь
якоря замыкается на дополнительный
резистор. Под действием ЭДС якоря
проходит ток и возникает тормозной
электромагнитный момент. Для того, чтобы
возникло самовозбуждение двигателя,
сопротивление цепи якоря должно быть
меньше критического значения![]() .
.![]() увеличивается с увеличением
увеличивается с увеличением![]() .
.
![]()
 -
определяется Rкр:
построили зависимость E
от I,
кривую намагничивания, и критический
Iкр
определяется по пересечению этих
графиков
-
определяется Rкр:
построили зависимость E
от I,
кривую намагничивания, и критический
Iкр
определяется по пересечению этих
графиков
![]() .
.
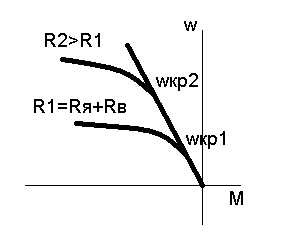
Формулы
механической характеристики динамического
торможения:
![]()
Основным преимуществом двигателей с последовательным возбуждением является большой пусковой момент при одинаковой мощности с двигателями независимого возбуждения, поэтому эти двигатели широко применяются в электротранспорте.