

Типовичок (СУЭП, 8 сем, Поехавший, ЭЛ-100-500)
.pdfНАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматизированного Электропривода
Системы управления электроприводов
Типовой расчёт
Группа: ЭЛ-01-09
Студент: Пахом Группа: Я банкииииииииииииииииииииииир

Оглавление |
|
Введение ........................................................................................................................................ |
3 |
Исходные данные ........................................................................................................................ |
4 |
Выбор двигателя .......................................................................................................................... |
4 |
Расчёт параметров схемы замещения двигателя................................................................... |
5 |
Построение механических и электромеханических характеристик двигателя ............. |
5 |
Выбор пусковых и тормозных резисторов ............................................................................ |
9 |
Синтез системы управления. Силовая часть. ..................................................................... |
12 |
Пуск по принципу тока ...................................................................................................... |
12 |
Торможение по принципу скорости............................................................................... |
14 |
Ускорение ослаблением поля ........................................................................................... |
16 |
Синтез системы управления. Обеспечение циклограммы.............................................. |
19 |
Пуск двигателя ...................................................................................................................... |
19 |
Пауза по SQ2......................................................................................................................... |
19 |
Пауза по SQ3 с последующим реверсом на повышенной скорости ....................... |
21 |
Снижение скорости при нажатии SQ2 при движении назад .................................... |
24 |
Пауза по SQ1 с последующим реверсом........................................................................ |
26 |
Синтез системы управления. Обеспечение требуемого количества циклов. ............. |
29 |
Выводы ........................................................................................................................................ |
34 |

Введение
Целью типового расчета является закрепление знаний по релейно-контакторным системам управления (РКСУ) электроприводов постоянного и переменного тока, а также приобретение навыков синтеза таких систем.
1.Для заданного варианта выбрать двигатель, построить пусковые и тормозные диаграммы, рассчитать величины пусковых, тормозных и регулировочных сопротивлений.
2.Составить принципиальную схему системы управления, которая обеспечивает выбор направления вращения, пуск, торможение и защитное отключение двигателя.
3.Составить полную принципиальную схему системы управления, которая дополнительно к функциям п. 2 обеспечивает заданный цикл перемещения рабочего органа механизма.
4.Реализовать схему системы управления в среде Simulink пакета MATLAB с использованием билиотеки релейно-контакторных элементов. Произвести настройку и наладку системы. Построить траекторию перемещения, скорость электропривода во времени, зафиксировать сигналы, необходимые для пояснения алгоритма работы схемы.
По желанию студента логика схемы может быть реализована на базе логических элементов среды Simulink или программным способом в пакете MATLAB.

Исходные данные
Тип двигателя: двигатель постоянного тока с независимым возбуждением Количество циклов:
Мощность нагрузки на повышенной скорости: Соотношение скоростей: k = 2.5
Пуск по принципу тока, торможение по принципу скорости (динамическое). Тип цикла:
Цикл 7
Выбор двигателя
Примем скорость в номинальном режиме |
|
. Тогда скорость в |
||||||||
режиме ослабления поля будет равна |
. |
|||||||||
Момент сопротивления нагрузки: |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Двигатель должен обеспечивать момент не ниже 30 Нм на скорости 2500 об/мин. Мощность двигателя на пониженной скорости:
Предварительный выбор - двигатель 4ПН180LУХЛ4:
Расчёт параметров схемы замещения двигателя
Для расчёта пусковых токов, добавочных сопротивлений и прочих прелестей нужно рассчитать параметры схемы замещения двигателя.
Потери двигателя:
Примем, что потери в якоре, обмотке возбуждения и на трение равны:
Отсюда номинальный ток якоря:
√√
Ток обмотки возбуждения:
√√
Взаимная индуктивность между якорем и статором:
Построение механических и электромеханических характеристик двигателя
Уравнения естественных механической и электромеханической характеристик двигателя:
|
( ) |
|
( ) |
( |
) |
|

Естественная электромеханическая характеристика
Скорость, рад/с
90
80
70
60
50
40
30
20
10
0
0 |
20 |
40 |
60 |
80 |
100 |
120 |
Ток якоря, А
ωе(I)
Естественная механическая характеристика
Скорость, рад/с
90
80
70
60
50
40
30
20
10
0
0 |
20 |
40 |
60 |
80 |
100 |
120 |
140 |
Момент двигателя, Нм
ωе(М)
Необходимо найти значения kФ, при которых двигатель обеспечит момент 22.9 Нм на скоростях в 1000 об/мин (104.7 рад/с) и 2500 об/мин (261 рад/с).
( )
( )
|
|
|
( ) |
|
|
√ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
( |
) |
|
|
√ |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
( |
|
) |
|
√ |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
Проверка допустимости по току:
Электромеханическая характеристика для пониженной скорости
|
120 |
|
|
100 |
|
с |
80 |
|
рад/ |
||
|
||
, |
|
|
Скорость |
60 |
|
|
40
20
0
0 |
10 |
20 |
30 |
40 |
50 |
60 |
Ток якоря, А
ωе(I)
Механическая характеристика для пониженной скорости
|
120 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рад/ |
80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость |
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
5 |
10 |
15 |
20 |
25 |
30 |
Момент двигателя, Нм
ωе(М)
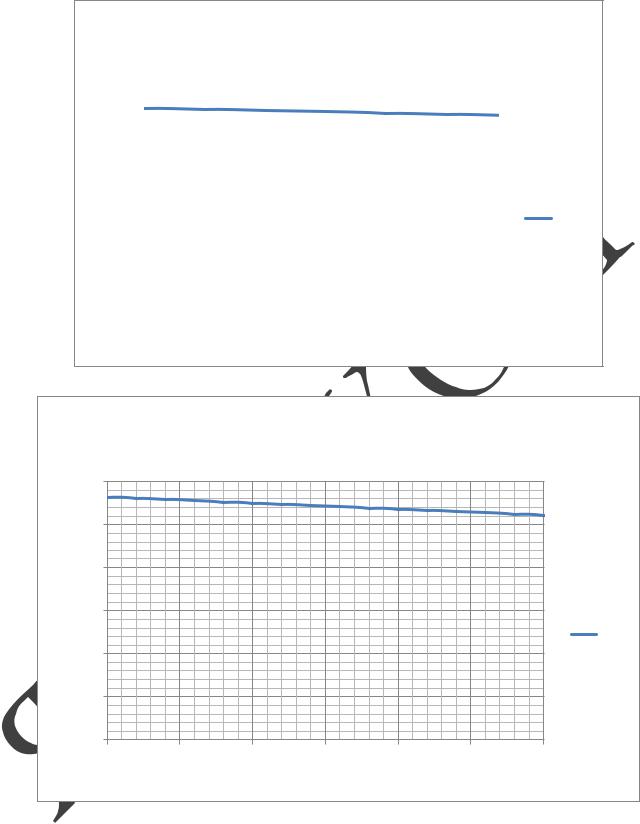
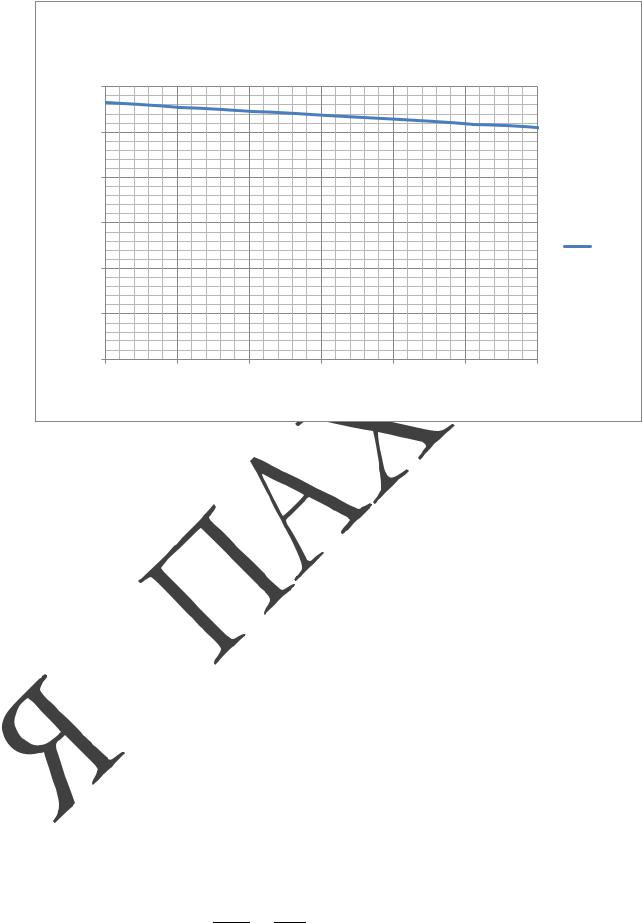
Электромеханическая характеристика для повышенной скорости
|
300 |
|
250 |
с |
200 |
рад/ |
|
, |
|
Скорость |
150 |
|
|
|
100 |
50
0
0 |
10 |
20 |
30 |
40 |
50 |
60 |
Ток якоря, А
ωе(I)
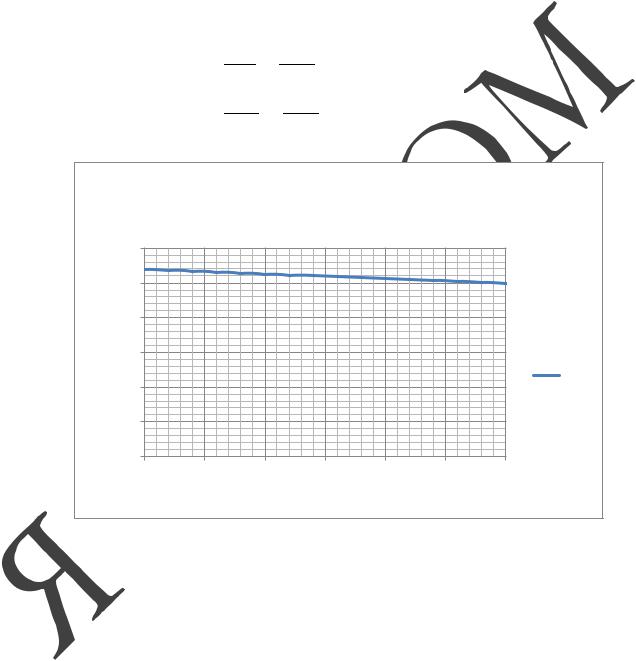
Механическая характеристика для повышенной скорости
|
300 |
|
250 |
с |
200 |
рад/ |
|
, |
|
Скорость |
150 |
|
100
50
0
0 |
5 |
10 |
15 |
20 |
25 |
30 |
Момент двигателя, Нм
Таким образом, выбранный двигатель удовлетворяет требованиям.
ωе(М)
Выбор пусковых и тормозных резисторов
При пуске и торможении ток двигателя не должен превысить двукратного номинального.
Так как пуск производится по принципу тока, то нужно выбрать нижнюю границу тока – на ней будут осуществляться шунтирования резисторов. Поскольку движение в обратном направлении механизм начинает сразу на повышенной скорости, то ток должен выбираться не меньшим, чем ток на повышенной скорости.
Исходя из этого выбираются пусковые и тормозные резисторы.

Скорость, на которой произойдёт шунтирование: |
|
( ) |
|
Значение тока после переключения не должно превысить |
, поэтому |
следующее значение сопротивления цепи якоря должно быть не менее:
Скорость, на которой произойдёт шунтирование: |
|
|||
( ) |
( |
) |
||
|
|
|
|
|
|
|
|
|
|
Следующее значение сопротивления:
Скорость, на которой произойдёт шунтирование: |
|
|||
( ) |
( |
) |
||
|
|
|
|
|
|
|
|
|
|
Следующее значение сопротивления:
Это значение меньше собственного сопротивления якоря. Таким образом для безопасного пуска достаточно трёх резисторов номиналами: