6. РАСЧЁТ И АНАЛИЗ ТРЁХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ
6.1. Основные понятия, параметры и характеристики
Асинхронная электрическая машина – это динамический элек-
тромагнитный аппарат, в неподвижной части которого возбуждается вращающееся магнитное поле, а подвижная часть вращается асинхронно, т.е. с угловой скоростью, отличной от угловой скорости магнитного поля [7, 12]. Асинхронные машины обратимы, т. е. они могут работать в реж ме дв гателя и в режиме генератора.
Область пр менен я асинхронных двигателей (АД) распространяется на электропр воды ытовых и промышленных вентиляторов, компрессоров насосов; электроприводы различных грузоподъёмных машин и механ змов, включая подъёмники и башенные краны; электроприводы крупного горного о орудования, такого как дробилки, экскаваторы, буровые установки. Мощность промышленных асинхронных машин варь руется от долей киловатта до сотен киловатт [5, 7].
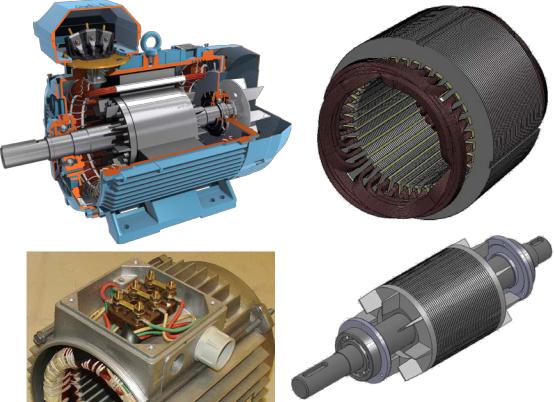
Ас нхронный дв гатель (рис. 6.1, а) состоит из двух основных |
|
частей: статора и ротора, разделённых воздушным зазором [5, 7]. |
|
а |
|
СибАДИ |
|
в |
г |
Рис. 6.1. Устройство трёхфазного асинхронного
двигателя с короткозамкнутым ротором
110
Статор – это неподвижная часть машины, которая состоит из станины с сердечником и трёхфазной обмотки, представляющей собой катушки медного провода (рис. 6.1, б). Катушки, расположенные в соседних пазах сердечника и соединённые последовательно, образуют катушечную группу. Каждая фаза обмотки состоит из катушечных
групп, соединённых между собой последовательно или параллельно |
||
СибАДИ |
||
таким образом, чтобы ЭДС всех катушек складывались друг с другом, |
||
сохраняя при этом направление тока в фазе [5, 7]. |
||
Начала |
концы |
фаз обмотки статора выведены на зажимы |
клеммной коробки, расположенной на корпусе машины (рис. 6.1, в и |
||
рис. 6.2, а). Статорная обмотка соединяется по схеме звезда или тре- |
||
угольн к (р с. 6.2, |
в). О ычно трёхфазный АД предназначен для |
|
включен я в трёхфазную сеть на два разных линейных напряжения 220/380 (230/400) В. Например, если линейное напряжение 220 (230) В, то статорная обмотка соединяется треугольником, а при линейном напряжен 380 (400) В – звездой [5, 7].
|
|
|
а |
б |
|
в |
|
|
|
|
|
|
3 |
~ |
|
3 ~ |
|
U1 |
V1 |
W1 |
U1 |
V1 |
W1 |
U1 |
V1 |
W1 |
W2 |
U2 |
V2 |
W2 |
U2 |
V2 |
W2 |
U2 |
V2 |
|
|
|
|
|
|
|||
|
|
|
|
Y |
|
|
|
|
Рис. 6.2. Схема подключения статорной обмотки:
а – катушек обмотки к клеммной коробке; – соединение фаз обмотки звездой; в – соединение фаз обмотки треугольником
Ротор – вращающаяся часть машины, представляющая собой вал на подшипниках с цилиндрическим сердечником, собранным из тонких пластин электротехнической стали (рис. 6.1, г). Пластины, изолированные друг от друга лаком или тонкой пленкой окисла, собирают в пакет и насаживают на вал. Вдоль наружного края сердечника ротора имеются пазы, в которых располагаются витки обмотки. Обмотка короткозамкнутого ротора выполняется заливкой собранного сердечника алюминиевым сплавом, в результате образуются витки обмотки, залитые в пазах, и короткозамыкающие кольца по торцам [5, 7].
111
Катушки фаз обмотки статора соединены таким образом, что в каждый момент времени электромагнитные силы (МДС, индукция и магнитный поток) одного полюсного деления складываются и образуют результирующее магнитное поле. С изменением направлений и величин токов в катушках непрерывно меняют своё расположение по окружности статора полюсные деления и магнитные полюса машины.
Таким образом, результирующее магнитное поле непрерывно «вра- |
|||
СибАДИ |
|||
щается» по окружности статора. |
|
|
|
Частота вращен я магнитного поля статора (синхронная частота) |
|||
определяется в об/м н как [5, 7]: |
|
|
|
n = |
60 f1 |
, |
(6.1) |
1 |
p |
|
|
где f1 – л нейная частота тока в о мотке статора (линейная частота питающего напряжен я, о ычно 50 Гц); р – число пар полюсов статора.
Ч сло пар полюсов p магнитного поля статора АД определяется количеством последовательно соединенных катушечных групп в каждой фазе обмотки. При этом катушечные группы одной фазы сдвинуты по окружности статора относительно катушечных групп другой фазы обмотки на угол 120°/р [5, 7].
Например, при наличии всего одной катушки в каждой фазе обмотки статор АД удет иметь только два магнитных полюса или одну пару полюсов. Тогда за один период изменения фазного тока обмотки статора результирующий вектор магнитной индукции повернётся на один полный оборот, или 360°. При последовательном соединении двух катушечных групп каждой обмотки статора число пар полюсов р = 2. Тогда магнитное поле за один период изменения фазного тока статора повернётся в пространстве на 180° и частота вращения магнитного поля n1 при частоте f1 = 50 Гц будет равна 1500 об/мин.
Принцип действия АД в самом общем виде состоит в следующем: статор используется для создания магнитного поля, вращающегося с определенной скоростью, а в замкнутых проводящих пассивных контурах ротора наводятся ЭДС, вызывающие протекание токов образование моментов сил при их взаимодействии с магнитным полем статора. Под действием электромагнитных сил обмоток ротор
вращается в направлении вращения магнитного поля статора [5, 7].
В связи с особенностями электромагнитных процессов АД не может самостоятельно обеспечить частоту вращения ротора n2, равную синхронной частоте вращения n1. Мерой относительной разницы частот вращения ротора n2 и магнитного поля статора n1 является па-
раметр скольжение [5, 7]:
112