

42.Характеристики средств технологических измерений в статике.
Статическое техническое измерение — измерение величины, которая принимается в соответствии с поставленной измерительной задачей за неизменяющуюся на протяжении периода измерения.
Уравнение преобразования связывает функционально и однозначно выходную и входную измеряемые величины.
Уравнение преобразования может задаваться таблично, графиком или функциональной зависимостью. Уравнение преобразования имеет следующий вид: Y=f(x) или α=f(I)

![]()
Y=a*x
K=a – статический коэффициент преобразования
Для линейной функции преобразования: k(x)=y/x=const
Для нелинейной функции преобразования: k(x)=var
Чувствительность – характеризует степень реагирования СИ на изменение входной величины:
![]()
![]()
часто в измерительных устройствах применяют относительную чувствительность:
![]()
Порог чувствительности – это изменение входной величины вызывающее наименьшее обнаруживаемое данным СИ без каких-либо дополнительных устройств измерения выходной величины.
Функция преобразования – характеризует связь между информативным выходным параметром и параметрами входных величин.
![]()
где: х - измеряемая величина;
![]() -
параметры цепи преобразования
-
параметры цепи преобразования
![]() - погрешности
- погрешности
43.Характеристики средств технологических измерений в динамике.
Динамическая характеристика средств измерения – это характеристика, отражающая инерционные свойства средств измерения при воздействии на них изменяющихся во времени величин.
СИ в динамике имеют характеристики отличные от характеристик в статике.
уравнение, связывающее измеряемую величину и выходную величину через динамические характеристики:
![]()
![]()
![]()
Причиной появления динамических характеристик является появление динамических погрешностей, вызванных наличием в СИ всякого рода накопительных элементов (ёмкость, индуктивность и др.), а также инерционностью подвижных частей и узлов. Динамическая погрешность представляет собой разницу значений выходных величин реального и идеального преобразователей, когда на их входы подаётся одна и та же измеряемая величина.
По степени полноты описания инерционных свойств средств измерения динамические характеристики делятся на полные и частные.
К полным относятся:
- Уравнение динамики систем, дифференциальные уравнения – это выражения, описывающие работу системы в динамике.
- Передаточная функция – это отношение изображения по Лапласу выходного сигнала к изображению по Лапласу входного сигнала. W(p)=y(p)/x(p).
- Совокупность амплитудно- и фазочастотных характеристик
- Переходная характеристика – это отклик системы на единичный скачок. Характеризует меру инерционности измеряемого преобразователя.
- Импульсная характеристика – это отклик системы на единичный импульс.
К частным относятся отдельные параметры полных характеристик, или характеристики, не отражающие полностью инерционных свойств средств измерения, но необходимые для выполнения измерений с заданной точностью (например, время установления сигнала).
44.Структурные схемы соединения измерительных преобразователей (последовательная, дифференциальная, логометрическая, компенсационная). Структурные схемы определяются конкретными задачами по получению точного результата, а также выбранным методом получения измерительной информации. При выборе структурной схемы ИП, задача сводится к:
1) уменьшению результирующей погрешности получения результата;
2) возможной динамической компенсацией по знаку аддитивной(мультипликативной) погрешности;
3) обеспечению требуемой чувствительности.
Последовательная схема соединения измерительных преобразователей:
Сигнал подается последовательно от одного к другому элементу измерительной схемы (с выхода предыдущего на вход последующего).
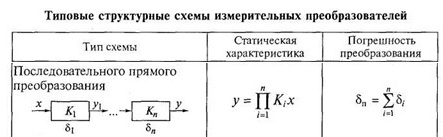
В формулах приняты следующие обозначения: x - измеряемая величина; у - выходная величина; δi - погрешность звена преобразователя; δП - общая погрешность преобразователя; K - коэффициент преобразования.
Суммарный коэффициент преобразования (общая чувствительность), равный произведению коэффициентов преобразования отдельных звеньев ИП, можно получить достаточно высоким, однако при этом увеличивается общая погрешность преобразования, равная сумме погрешностей составляющих звеньев. Общая погрешность при последовательном соединении увеличивается по мере роста их количества в измерительной схеме и равна сумме каждого звена.
Дифференциальная схема соединения измерительных преобразователей:
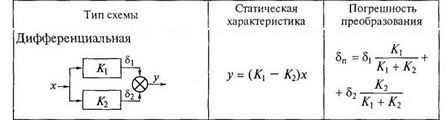
В датчиках, построенных по дифференциальной схеме, измеряемая величина подается одновременно на два идентичных измерительных преобразователя. Выходной сигнал датчика пропорционален разности выходных сигналов ИП каждого из каналов. Если выходные сигналы имеют одинаковые знаки, то орган сравнения выполняет операцию вычитания, если знаки разные - операцию суммирования.
Возможны варианты, когда на один из входов подается эталонный сигнал и сравнение осуществляется с ним или информация преобразуется по одному каналу в реальных условиях, а по другому - в эталонных.
К достоинствам дифференциальных схем построения датчиков следует отнести: значительное уменьшение аддитивных (постоянных) составляющих общей погрешности, обусловленных воздействием возмущающих факторов; увеличение чувствительности вдвое при подаче входного сигнала на оба входа; получение реверсивной статической характеристики; снижение нелинейности статической характеристики и постоянных составляющих выходного сигнала по сравнению с характеристиками отдельных ИП, входящих в схему.
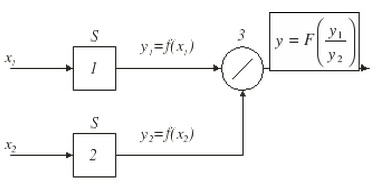
Логометрическая схема соединения измерительных преобразователей:
Логометрический преобразователь – преобразователь с 2-мя входами, выходной сигнал которого является функцией частного от деления 2-х входных величин:
![]()
Оба канала выполнены одинаково и находятся при одинаковых условиях.
Логометрическая
схема позволяет компенсировать
мультипликативную погрешность. Так,
если
![]() ,
то
,
то
![]()
Не зависит от изменения чувствительности каналов (если она изменяется одинаковым образом). Например, в ряде случаев чувствительность сильно зависит от напряжения питания и обычно пропорциональна этому напряжению, т.е. возникающая мультипликативная погрешность логометрической схемы позволяет ее уменьшить. Логометрическая схема включения ИП содержит два канала с последовательным соединением ИП, выходные величины которых подаются на логометрический преобразователь.
Компенсационная схема соединения измерительных преобразователей:
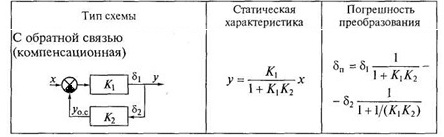
Наиболее совершенной схемой ИП является схема с обратной связью, или компенсационная схема. В датчиках, построенных по этой схеме, обеспечивается автоматическое уравновешивание контролируемой величины компенсирующей величиной того же рода непосредственно или после предварительного преобразования. Основное достоинство такой схемы состоит в ее способности компенсировать значительные изменения параметров измерительного тракта. Кроме того, основная часть энергии, необходимой для работы датчика, берется от дополнительных источников, а не от измерительного элемента.
Преобразователи с отрицательной обратной связью принципиально точнее, чем схемы прямого последовательного преобразования. Отрицательная обратная связь существенно снижает влияние погрешностей звеньев прямой цепи на результат преобразования. Любые ошибки и возмущение звена, не охваченного обратной связью, полностью передаются на выход преобразователя, поэтому при построении ИП целесообразно стремиться к тому, чтобы охватить обратной связью как можно больше звеньев. При величине K1K2 = 20...30, что нетрудно обеспечить на практике, общая погрешность преобразования практически определяется только погрешностью δ2 обратной связи, вследствие чего требования к погрешности δ1 прямого канала можно значительно снизить. Датчики с обратной связью обладают высокой чувствительностью и позволяют легко изменять параметры настройки путем изменения коэффициентов преобразования обратной цепи.