

3. Определение устойчивости аср важнейших технологических параметров
3.1. Идентификация объекта автоматизации
Все расчеты здесь и далее произведены с помощью MATLAB[10].
Под идентификацией
динамических объектов понимают процедуру
определения структуры и параметров их
математиче ских
моделей, которые при одинаковом входном
сигнале объекта и модели обеспечивают
близость выхода модели к выходу объекта
при наличие какого-то критерия качества.
ских
моделей, которые при одинаковом входном
сигнале объекта и модели обеспечивают
близость выхода модели к выходу объекта
при наличие какого-то критерия качества.
Создали массив данных состоящий из 2 тысяч значений входного параметра и 2 тысяч значений выходного параметра. Интервал дискретизации равен 3 с (ts=3). Для загрузки в рабочую область MATLAB массива данных необходимо выполнить команду:
![]()
После выполнения команды в рабочей области появились массив входных переменных u и массив выходного параметра y.
![]()
Интервал дискретизации указывается дополнительно:
Сформированный
файл указывает, что он содержит результаты
100 измерений с интервалом дискретизации
3 с. Входными пе ременными
является массив u, а выходным параметром
y. Для наглядности сформированного файла
необходимо в его структуру ввести
обозначения входных и выходных данных:
ременными
является массив u, а выходным параметром
y. Для наглядности сформированного файла
необходимо в его структуру ввести
обозначения входных и выходных данных:
>>set(dan41,’InputName’,'Тонкоcть помола клинкера’,'OutputName’,'Влажноcть клинкера’)
Для просмотра полной информации о полученном файле воспользуемся командой: >> get(dan41)
ans =
Domain: ‘Time’
Name: []
OutputData: [100×1 double]
y: [1×18 char]
OutputName: {[1×18 char]}
OutputUnit: {'’}
InputData: [100×1 double]
u: [1×17 char]
InputName: {[1×24 char]}
InputUnit: {'’}
Period: Inf
InterSample: ‘zoh’
Ts: 3
Tstart: []
SamplingInstants: [100×0 double]
TimeUnit: ‘’
ExperimentName: ‘Exp1′
Notes: []
UserData: []
Для графического
представления данных во спользуемся
командой:
спользуемся
командой:
plot(dan41) (рис.4):
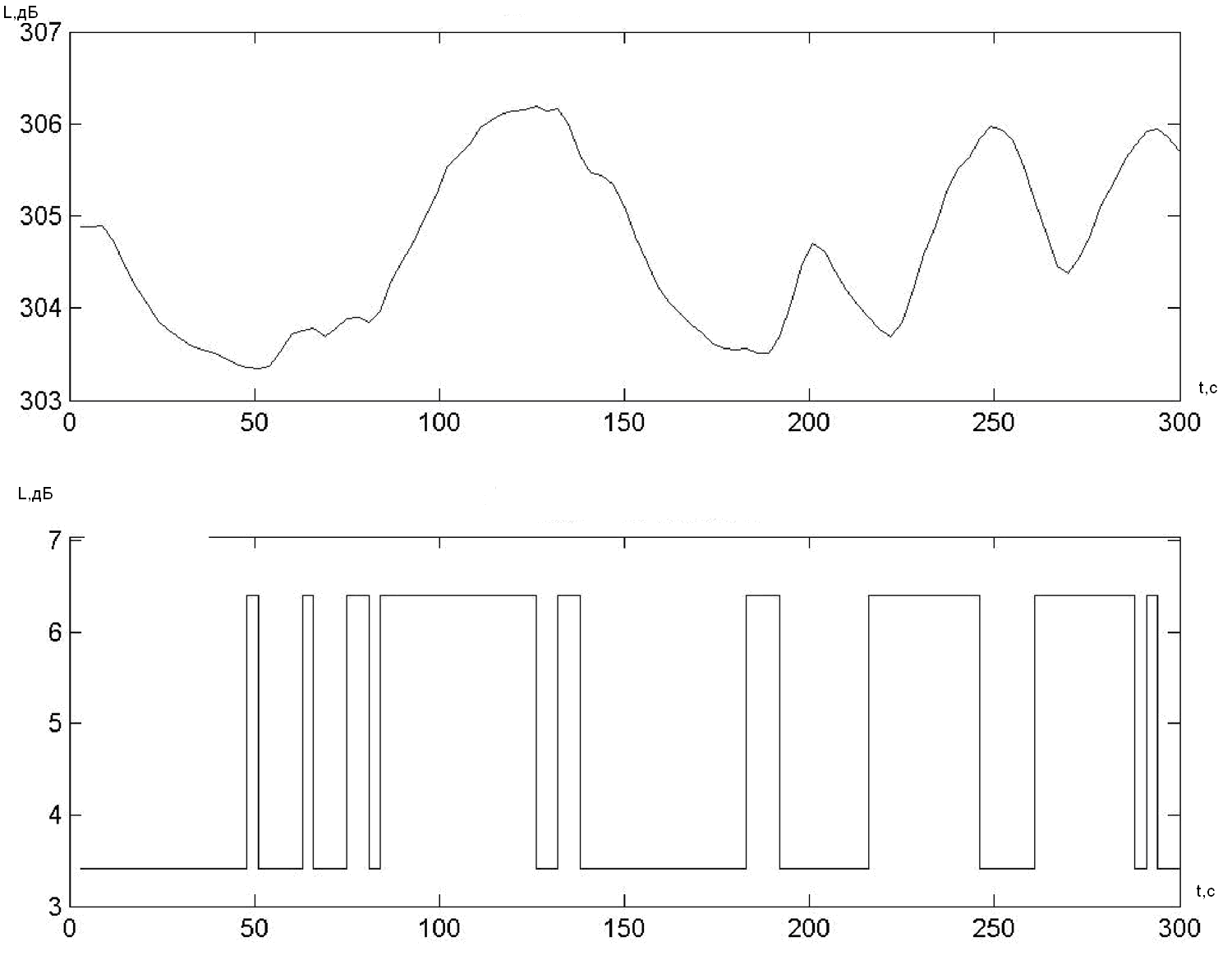
Рис.4. Графическое представление данных
Для дальнейшего использования полученных исходных данных необходимо провести предварительную обработку этих данных с целью удаления тренда из набора данных и если необходимо отфильтровать данные с помощью имеющихся средств в пакете System Identification Toolbox. Данные операции проведем в графическом интерфейсе System Identification Toolbox, который запускается из командной строки командой:
>> ident
Opening ident ……. done.
Импортируем файл данных в среду интерфейса с помощью команды data – import (рис.5):
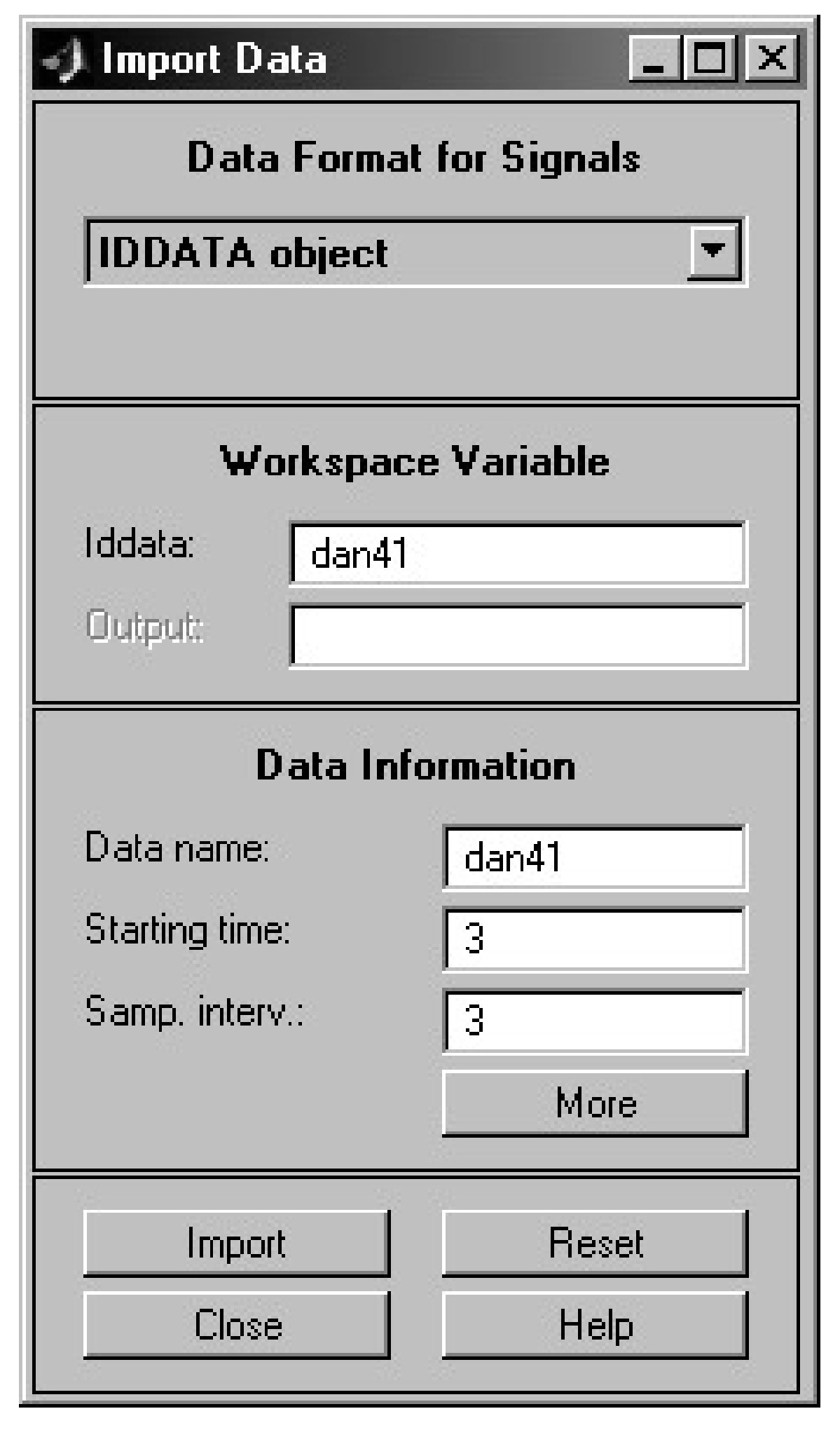
Рис.5. Среда интерфейса
Запустим режим
быстрого старта, для чего в падающем меню Operations выберем Quick Start. При
выборе этого режима производится:
падающем меню Operations выберем Quick Start. При
выборе этого режима производится:
удаление тренда из массива экспериментальных данных;
формирование усеченных массивов данных с именами dande и dandv для построения моделей (рис. 6)
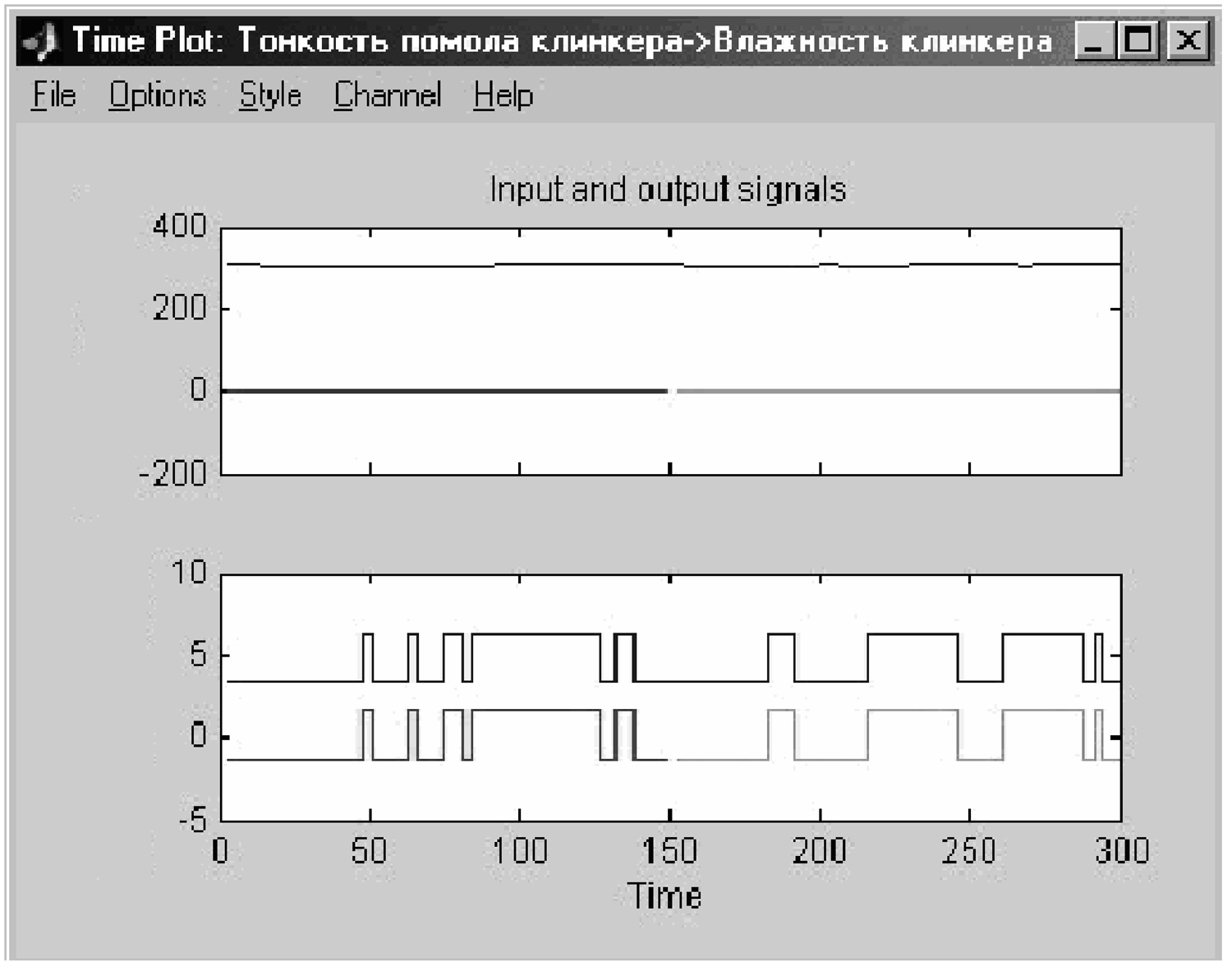 Рис.6.
Тонкость помола и влажность клинкера
Рис.6.
Тонкость помола и влажность клинкера
После проведения предварительной обработки данных можно приступить к нахождению оценки модели.
В предложенном списке Estimate выбираем Parametric models, данный выбор приведет к открытию диалогового окна задания структуры модели. Получим параметрические модели из предложенного списка (ARX, ARMAX, OE, BJ, State Space), оценка производится нажатием кнопки Estimate. Существует возможность изменить параметры модели в редакторе Order Editor.
Воспользуемся
значениями по умолчанию, за исключением
ARX и State Space, у которых параметры выберем,
нажав кнопку Order Sel ection
(рис.7).
ection
(рис.7).

Рис.7. Экспериментальные кривые
Для анализа моделей воспользуемся средствами System Identification Toolbox: Model output, Transient resp, Frequency resp.
Для анализа модели ТОУ возьмем модель arx233 для чего перетащим ее на иконку To Workspace, при этом модель arx233 появится в рабочем пространстве MATLAB.
Полученные модели представлены в так называемом тета – формате и являются дискретными. Для преобразования модели из тета - формата в вид удобный для дальнейшего использования в пакете System Identification Toolbox имеются специальные функции.
Преобразуем модель тета-формата многомерного объекта в вектор передаточных функций, связанных с выбранным входом:
>> [A, B] =th2arx (arx233) A = 1.0000 -1.2514 0.3763 B = Columns 1 through 3 0 0 0 Columns 4 through 6 0.0600 0.0487 0.0125
>> [num,den]=th2tf(arx233) num = Columns 1 through 3 0 0 0 Columns 4 through 6 0.0600 0.0487 0.0125 den = Columns 1 through 3 1.0000 -1.2514 0.3763 Columns 4 through 6 0 0 0
где, num, den
соответственно числитель и знаменатель
дискретной передаточной функции.
Получим дискретную передаточную функцию:
>> zarx233 = tf(num, den, ts)
Transfer function: 0.05999 z^2 + 0.04869 z + 0.01253 ——————————— z^5 - 1.251 z^4 + 0.3763 z^3
![]() (1)
(1)
Sampling time: 3
Преобразуем дискретную модель в непрерывную и представим ее в виде передаточной функции:
>> sarx233 = thd2thc (arx233) Continuous-time IDPOLY model: A(s) y (t) = B(s) u (t) + C(s) e (t) A(s) = s^3 + 12.4 s^2 + 3.955 s + 0.2669 B(s) = 0.3928 s^2 - 0.1036 s + 0.2589 C(s) = s^3 + 12.8 s^2 + 8.952 s + 2.136 >> [num1, den1] =th2tf (sarx233) num1 = Columns 1 through 3 0 0.3928 -0.1036 Column 4 0.2589 den1 = Columns 1 through 3 1.0000 12.3970 3.9546 Column 4 0.2669 >> sysarx233 = tf (num1, den1) Transfer function: 0.3928 s^2 - 0.1036 s + 0.2589 ——————————— s^3 + 12.4 s^2 + 3.955 s + 0.2669
![]() (2)
(2)
Приведенные
передаточные функции являются одной и
той же моделью, записанной в разных
формах и форматах. Проанализируем
динамические характеристики модели.
Для этого воспользуемся кома ндой:
ндой:
>> step(sysarx233) (рис. 8).
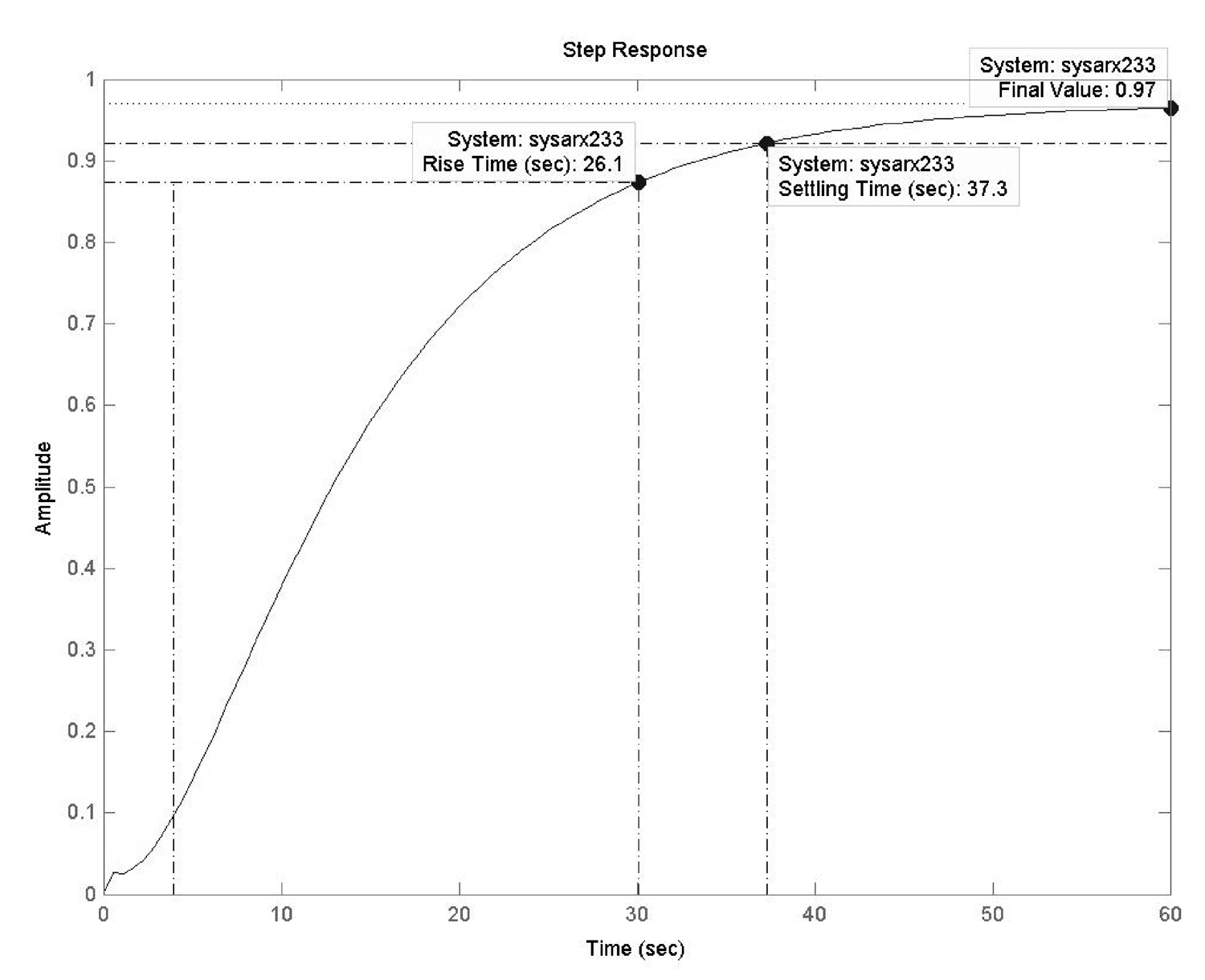 Рис.
8. Динамическая характеристика модели
помола цементного клинкера в трубной
шаровой мельницы
Рис.
8. Динамическая характеристика модели
помола цементного клинкера в трубной
шаровой мельницы
В поле графика указаны основные характеристики переходящего процесса: время нарастания, время регулирования, установившееся значение выходной координаты.
Для построения импульсной характеристики модели необходимо воспользоваться командой:
>> impulse(sysarx233) (рис. 9).
 Рис.
9. Импульсная характеристика модели
помола цементного клинкера в трубной
шаровой мельницы
Рис.
9. Импульсная характеристика модели
помола цементного клинкера в трубной
шаровой мельницы
Определим частотные
характеристики моделей с помощью команды: >> bode(sysarx233) (рис.
10).
с помощью команды: >> bode(sysarx233) (рис.
10).

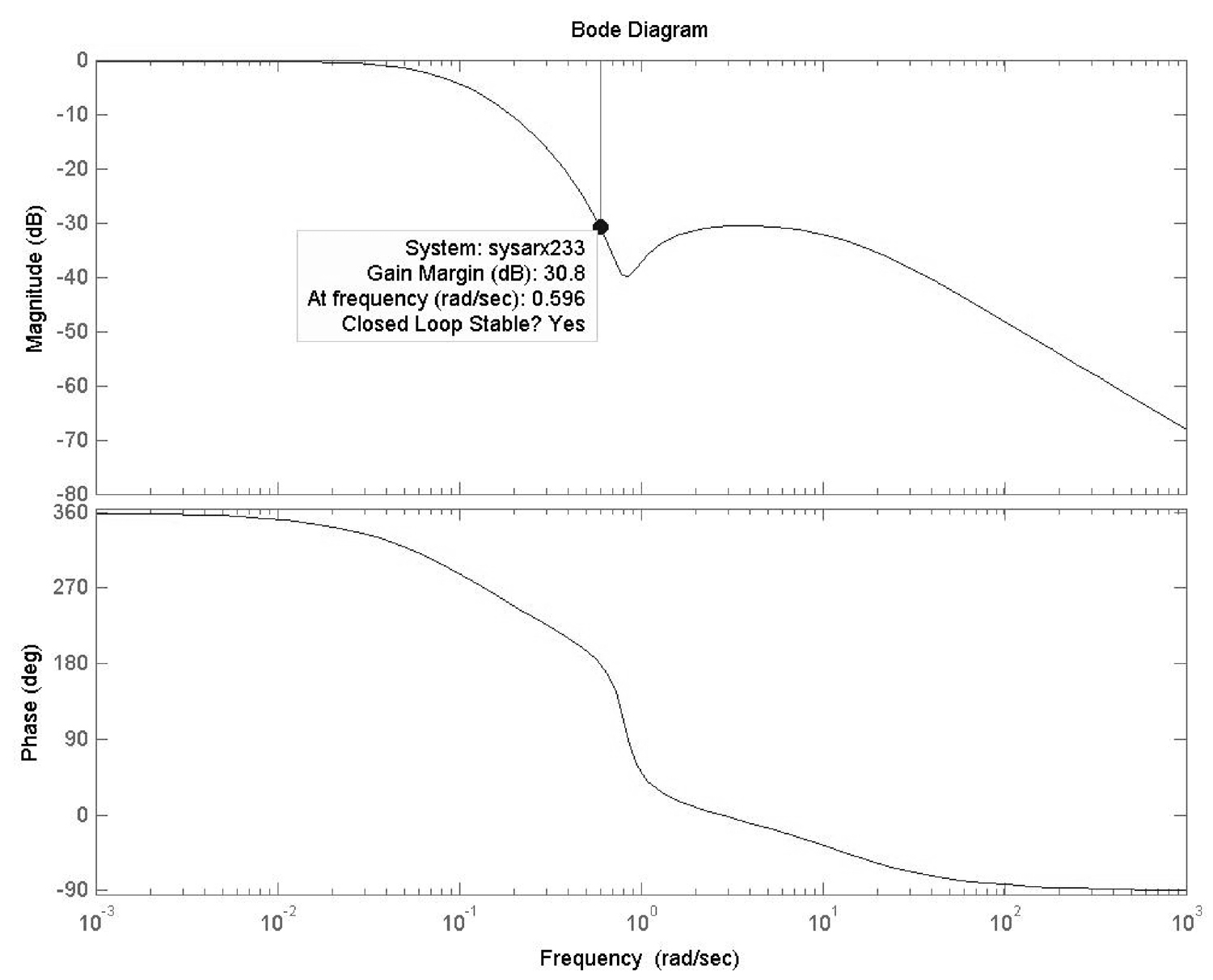 Рис.
10. Частотные характеристики помола
цементного клинкера в трубной шаровой
мельницы
Рис.
10. Частотные характеристики помола
цементного клинкера в трубной шаровой
мельницы
Также можно просмотреть годограф Найквиста:
>> nyquist(sysarx233) (рис. 11).
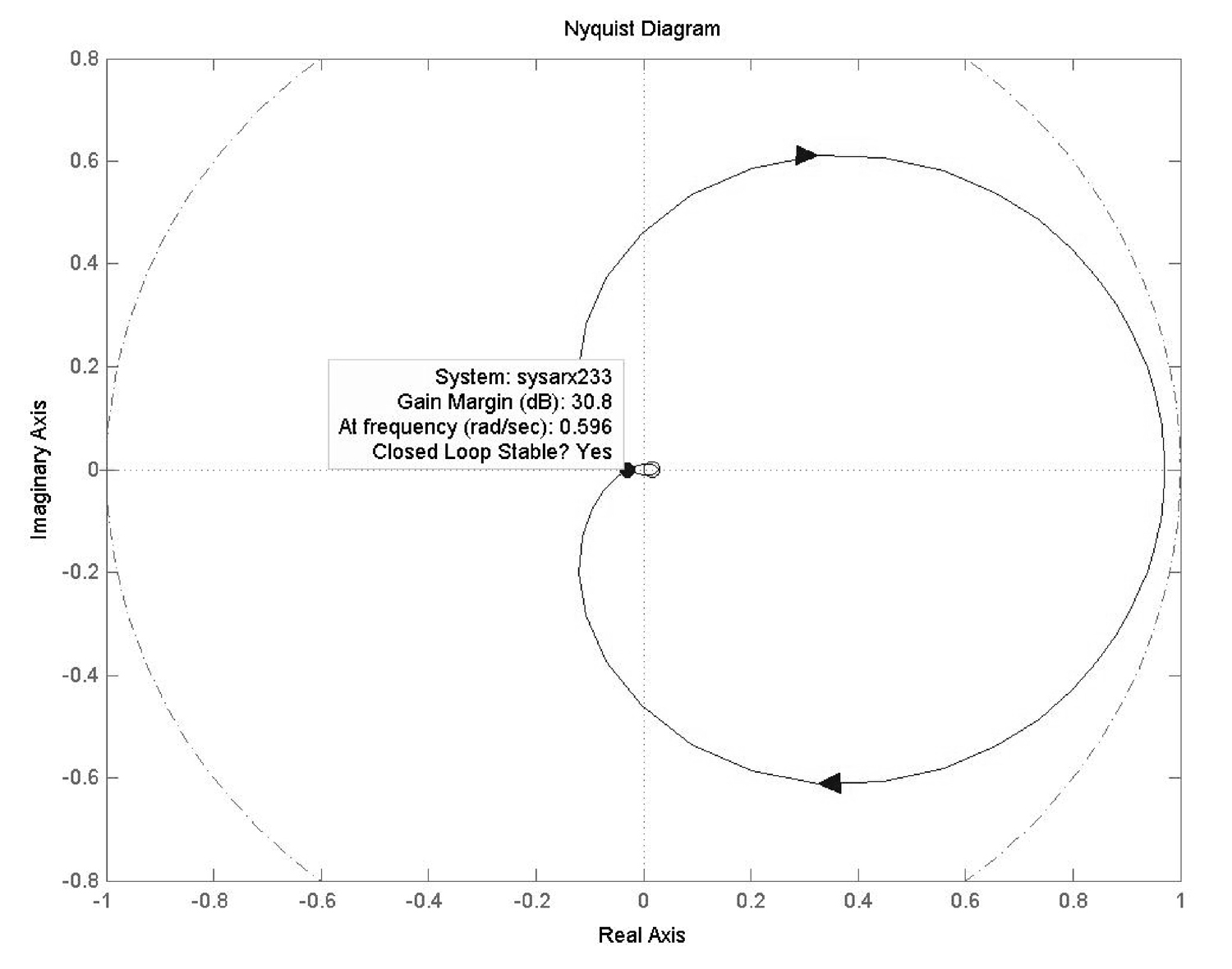 Рис.
11. Годограф Найквиста (АФЧХ) помола
цементного клинкера в трубной шаровой
мельницы
Рис.
11. Годограф Найквиста (АФЧХ) помола
цементного клинкера в трубной шаровой
мельницы
Найквиста годограф АФЧХ не пересекает точку комплексной плоскости с координатами -1,j0, из этого следует, что данная система устойчива.
Значения запасов устойчивости можно определить также и в режиме командной строки MATLAB с помощью команды
>> [Gm, Pm, Wcg, Wcp] =margin (sysarx233) Gm = 34.7465 Pm = Inf Wcg = 0.5964 Wcp = NaN
где Gm – запас устойчивости по амплитуде в натуральных величинах на частоте Wcg, Pm – запас устойчивости по фазе на частоте Wcp. Для определения запасов устойчивости в логарифмическом масштабе необходимо выполнить следующие операции:
>> Gmlog=20•log10(Gm) Gmlog = 30.8182
Как видно, определение
запасов устойчивости последним способом
позволяет значительно точнее вычислять
эти значения, ч ем
на графиках частотных характеристик.
ем
на графиках частотных характеристик.
Анализ частотных характеристик показывает, что модели arx233 являются устойчивыми с соответствующими запасами устойчивости по амплитуде. Запас устойчивости по фазе равен бесконечности.
В пакете Control System Toolbox имеется функция ctrb, формирующая матрицу управляемости в пространстве состояний. Для того, чтобы воспользоваться этой функцией необходимо вычислить матрицы А, В, С, D с помощью команды:
>> [A, B, C, D] = ssdata
(sysarx233)
A =
-12.3970 -0.9887 -0.0334
4.0000 0 0
0
2.0000 0
B =
0.5000
0
0
C = 0.7857 -0.0518
0.0647
D = 0
Вычислим матрицу
управляемости:
>> Mu=ctrb (A, B)
Mu
=
0.5000 -6.1985 74.8659
0 2.0000 -24.7941
0 0
4.0000
Определим ранг матрицы
управляемости:
>> nMu=rank(Mu) nMu
= 3
nMu
= 3
При синтезе оптимальных систем с обратной связью сами управления получаются как функции от фазовых координат. В общем случае фазовые координаты являются абстрактными величинами и не могут быть исследованы. Поддается измерению (наблюдению) вектор у = (у1, …,yk)T , который обычно называют выходным вектором или выходной переменной, а его координаты - выходными величинами. Выходная переменная функционально связана с фазовыми координатами, и для реализации управления с обратной связью необходимо определить фазовые координаты по измеренным значениям выходной переменной. В связи с этим возникает проблема наблюдаемости, заключающаяся в установлении возможности состояния определения состояния объекта (фазового вектора) по измеренным значениям выходной переменной на некотором интервале.
Решение проблемы наблюдаемости основано на анализе уравнений переменных состояния и формулируется следующим образом: объект называется вполне наблюдаемым, если по реакции y(tk) на выходе объекта, на интервале времени [t0, tk] при заданном управляющем воздействии u(t) можно определить начальное состояние вектора переменных состояния x(t), являющихся фазовыми координатами объекта.
Критерием наблюдаемости линейных стационарных объектов является условие: для того, чтобы объект был вполне наблюдаемым, необходимо и достаточно, чтобы ранг матрицы наблюдаемости равнялся размерности вектора состояния .
Определим матрицу наблюдаемости:
>> My=obsv (A, C) My = 0.7857 -0.0518 0.0647 -9.9473 -0.6473 -0.0262 120.7278 9.7820 0.3318
Определим ранг матрицы наблюдаемости:
>> nMy=rank(My) nMy = 3
Таким образом, для
исследуемой модели объекта размерность
вектора состояний, определяемая размером
матриц A и C равна трем  и
ранг матрицы наблюдаемости MY также
равен трем, что позволяет сделать вывод
о том, что объект автоматизации является
вполне наблюдаемым, т.е. для него всегда
можно определить по, значениям выходной
величины y(t) вектор переменных состояния,
необходимый для синтеза системы
управления. [5,10]
и
ранг матрицы наблюдаемости MY также
равен трем, что позволяет сделать вывод
о том, что объект автоматизации является
вполне наблюдаемым, т.е. для него всегда
можно определить по, значениям выходной
величины y(t) вектор переменных состояния,
необходимый для синтеза системы
управления. [5,10]
3.2. Обоснование выбора типа регулятора АСР помола цементного клинкера в трубной шаровой мельницы
На основании идентификации и полученых передаточных функций построим схему системы автоматического регулирования обжига клинкера в SIMULINK (рис. 12).
Wдатчика=0.4, Wрабочего органа=0.3/ (0.55p+1), Wисполнительного механизма=10/ (0.15р+1).
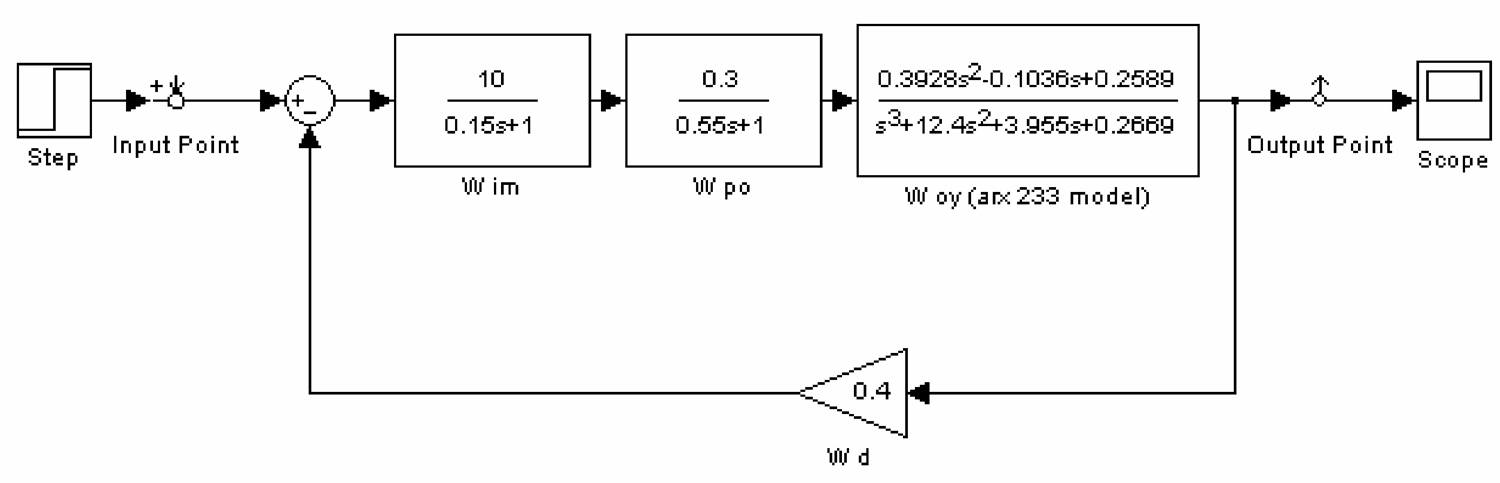 Рис.
11. Схема САР помола цементного клинкера
в трубной шаровой мельнице без регулятора
Рис.
11. Схема САР помола цементного клинкера
в трубной шаровой мельнице без регулятора
С помощью LTI построим переходную характеристику, ЛАХ и ЛФХ помола цементного клинкера в трубной шаровой мельнице (рис. 13).

Рис.13. Переходная характеристика АСР загрузки мельницы
По виду переходной
характеристики мож но
сказать, что имеющиеся показатели
качества не удовлетворяют заданным:
но
сказать, что имеющиеся показатели
качества не удовлетворяют заданным:
Время регулирования составляет 24.6 с.
Установившееся значение – 1.34
Время нарастания – 10.3 с.
Статическая ошибка – 0,66
Заданные показатели качества и запасы устойчивости:
Время регулирования ≤50 с Статическая ошибка ≤0,05 Перерегулирование ≤10 % Время нарастания ≤15 с Устойчивость по амплитуде ≥10 дБ Устойчивость по фазе от 30 до 80 градусов.
Для построения ЛАХ, ЛФХ и АФХ необходимо разомкнуть систему (рис. 14), (рис. 15).
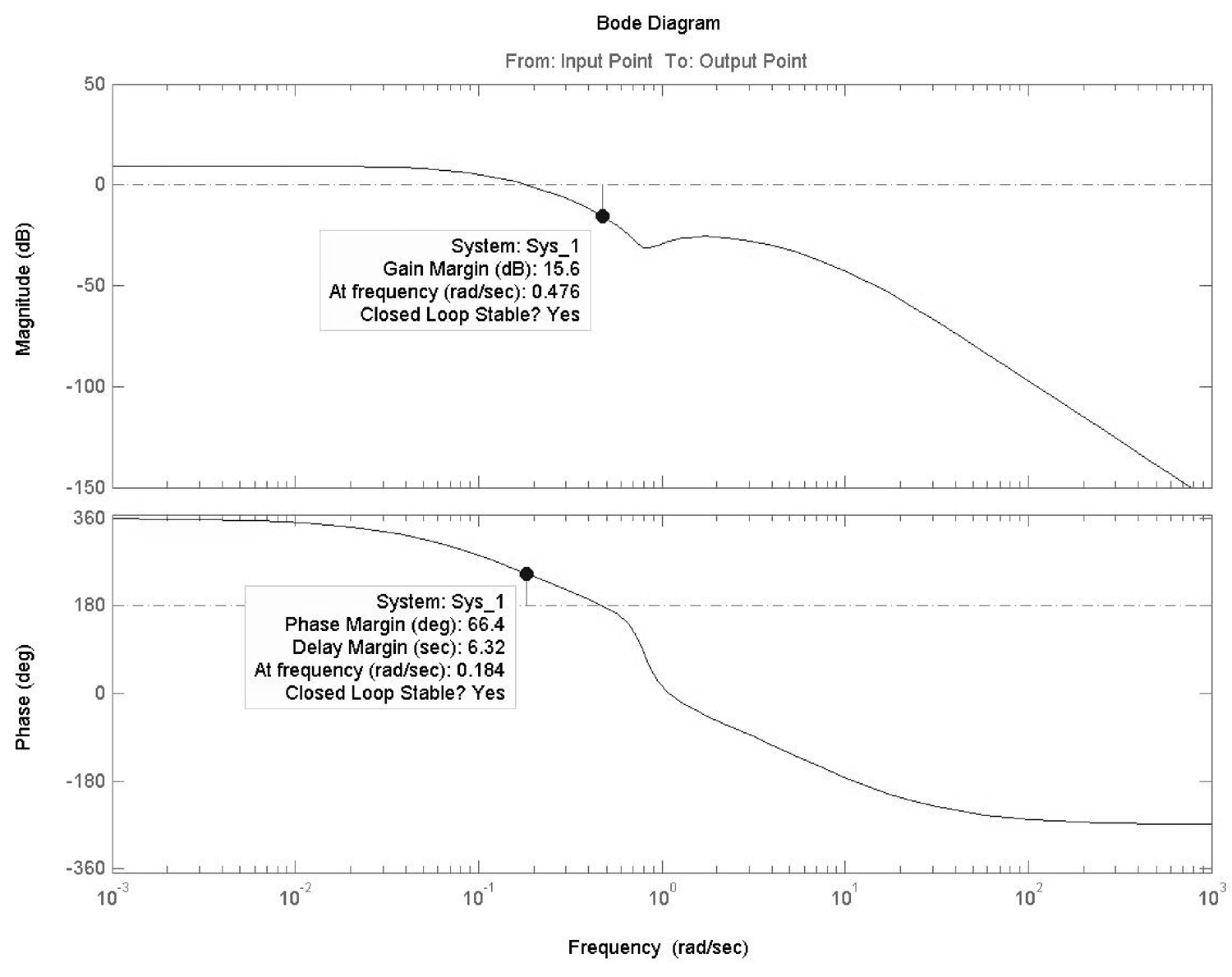 Рис.
14. ЛАХ и ЛФХ загрузки мельницы
Рис.
14. ЛАХ и ЛФХ загрузки мельницы
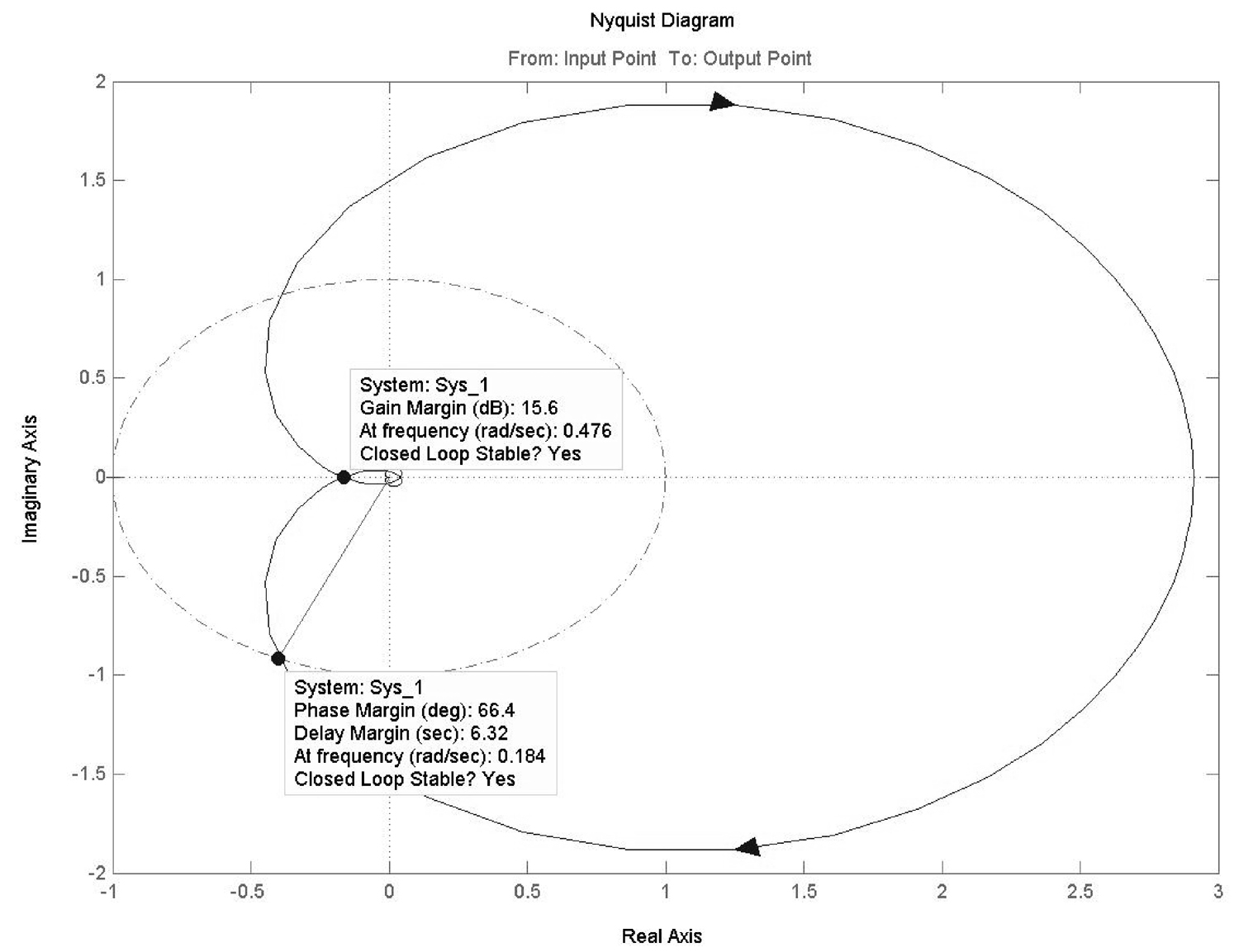 Рис.
15. АФЧХ загрузки мельницы
Рис.
15. АФЧХ загрузки мельницы
По виду переходного
процесса ясно, что д ля
обеспечения заданных показателей
качества и точности переходного процесса
необходимо введение в систему линейного
регулятора.
ля
обеспечения заданных показателей
качества и точности переходного процесса
необходимо введение в систему линейного
регулятора.
Необходимым условием надежной устойчивой работы является правильный выбор типа регулятора и его настроек, гарантирующий требуемое качество регулирования.
В зависимости от свойств объектов управления, определяемых его передаточной функцией и параметрами, и предполагаемого вида переходного процесса выбирается тип и настройка линейных регуляторов.
Получим следующего вида САР(рис. 16):
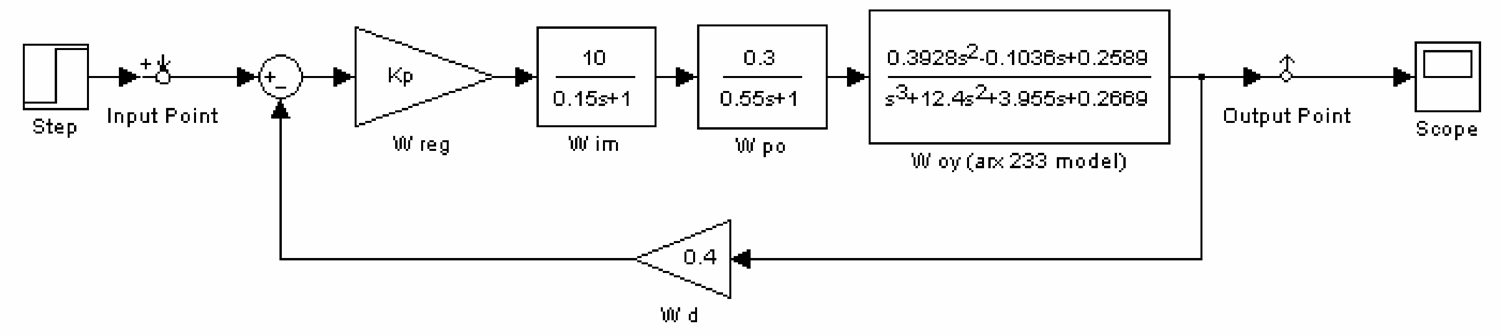 Рис.
16. Система автоматического регулирования
загрузки мельницы с П-регулятором
Рис.
16. Система автоматического регулирования
загрузки мельницы с П-регулятором
