

3.5 Расчет сопротивлений тормозного реостата.
Пример: Рассчитать сопротивления тормозных реостатов для двигателя с параметрами:
= 42 кВт, = 220В, = 1500 об/мин, = 217 А.
Определим
R
динамического торможения, если
 = 1540 об/мин,
= 1540 об/мин,
 =
1.57
А,
=
1.57
А,
 = 1,32.
= 1,32.
Определим R торможения противовключением:
 .
.
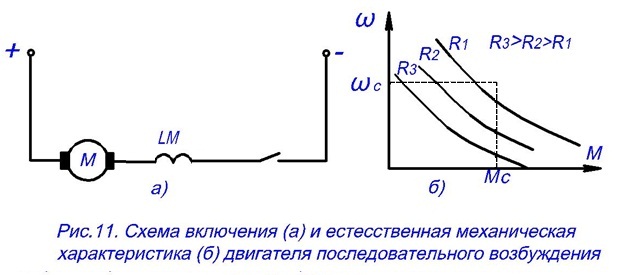
3.6 Электродвигатели постоянного тока последовательного возбуждения
Механические
характеристики электродвигателя
последовательного возбуждения зависят
от одновременно изменяющихся токов
якорной цепи и цепи ОВ, рис. 11,а. При
небольшом токе цепи магнитный поток
статора и ротора ненасыщен и определяется
уравнением
 ,
а выведенное ранее уравнение
электродвигателя параллельного
возбуждения примет вид:
,
а выведенное ранее уравнение
электродвигателя параллельного
возбуждения примет вид:
 .
В
данном уравнении сопротивление двигателя
равно сумме сопротивлений якоря и
обмотки возбуждения. Момент, развиваемый
электродвигателем при ненасыщенной
цепи пропорционален квадрату тока
.
В
данном уравнении сопротивление двигателя
равно сумме сопротивлений якоря и
обмотки возбуждения. Момент, развиваемый
электродвигателем при ненасыщенной
цепи пропорционален квадрату тока
 .
.
Решение двух полученных уравнений относительно показывает, что механическая характеристика имеет гиперболический характер и при уменьшении момента к нулю стремится к , рис 11. Увеличение добавочного сопротивления делает характеристику более жесткой.
 В
реальных двигателях за счет потерь в
стали
В
реальных двигателях за счет потерь в
стали
 ,
что
опасно для конструкции, т.к. может
произойти разрушение обмотки
и коллектора ротора. Поэтому электродвигатели
последовательного возбуждения не
применяют для привода механизмов имеющих
холостой
ход
или снижение нагрузки
до
малых значений и ограничивают:
,
что
опасно для конструкции, т.к. может
произойти разрушение обмотки
и коллектора ротора. Поэтому электродвигатели
последовательного возбуждения не
применяют для привода механизмов имеющих
холостой
ход
или снижение нагрузки
до
малых значений и ограничивают:
 .
.
Электродвигатели последовательного возбуждения пользуются в подъемных машинах, в приводах электрифицированного транспорта, экскаваторов, где работа связана с преодолением больших перегрузок, т.к. они способны развивать большой вращающий момент.
Пуск электродвигателя последовательного возбуждения осуществляют, изменяя в якорной цепи или изменяя величину напряжения источника питания.
При
реостатном пуске величина пускового
реостата определяется уравнением

Величина
пускового тока берется равной нескольким
значениям номинального тока
 .
Количество
ступеней
пускового реостата обычно равно двум
- трем.
.
Количество
ступеней
пускового реостата обычно равно двум
- трем.
Пуск при питании двигателя от источника с регулируемым напряжением заключается в плавном повышении напряжения на якоре при полном магнитном потоке, начиная с минимального напряжения, при котором обеспечивается необходимый пусковой момент. Скорость при этом возрастает пропорционально напряжению.
Торможение электродвигателя последовательного возбуждения возможно в двух режимах - динамическом и противовключения. Рекуперативное торможение здесь получить нельзя, т.к. ЭДС электродвигателя не может быть больше напряжения сети.
Динамическое торможение двигателей осуществляется по двум схемам - с независимым возбуждением и с самовозбуждением. При независимом возбуждении характеристики двигателя аналогичны характеристикам двигателя с параллельным возбуждением.
При
динамическом торможении с самовозбуждением
двигатель отключается от сети и вместе
с обмоткой возбуждения замыкается на
тормозное сопротивление
 Благодаря остаточному намагничиванию
двигатель работает в качестве генератора
с самовозбуждением. Торможение
противовключением используется в
подъемных установках, когда двигатель
включен на подъем, но под действием
груза вращается в противоположном
направлении. Режим противовключения
получают также за счет изменения во
время работы полярности напряжения на
якоре.
Благодаря остаточному намагничиванию
двигатель работает в качестве генератора
с самовозбуждением. Торможение
противовключением используется в
подъемных установках, когда двигатель
включен на подъем, но под действием
груза вращается в противоположном
направлении. Режим противовключения
получают также за счет изменения во
время работы полярности напряжения на
якоре.
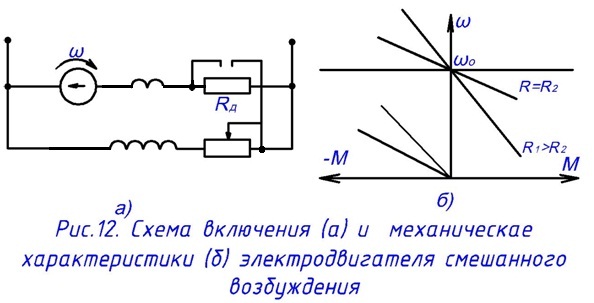
Двигатели постоянного тока смешанного возбуждения. Двигатель имеет две обмотки возбуждения - параллельную и последовательную, рис. 12,а.
Магнитный
поток двигателя определяется суммой
намагничивающих сил
 .
Соответственно
электромагнитный момент будет определяться
выражением:
.
Соответственно
электромагнитный момент будет определяться
выражением:

 Промышленность
выпускает двигатели, у которых
Промышленность
выпускает двигатели, у которых
 примерно равно
примерно равно
 .
Достоинством двигателей смешанноговозбуждения
является то, что при холостом ходе
скорость вращения не может достичь
опасной величины, т.к. определяется в
основном магнитным потоком
.
.
Достоинством двигателей смешанноговозбуждения
является то, что при холостом ходе
скорость вращения не может достичь
опасной величины, т.к. определяется в
основном магнитным потоком
.
Механические характеристики, рис. 12, б, занимают промежуточное положение между характеристиками электродвигателей параллельного и последовательного возбуждения.
Электродвигатель имеет все три способа торможения. При рекуперативном торможении, когда ток в цепи якоря изменяет направление на обратное, ток последовательной обмотки становится размагничивающим. Для устранения этого явления при переходе скорости через последовательную обмотку шунтируют. Пуск электродвигателя производится такими же методами, что и пуск электродвигателей параллельного и последовательного возбуждения.