

1.1 Уравнение движения электропривода
Поступательное
движение тела с массой m, со скоростью
описывается управлением:

где F – движущая сила, Fс – сила сопротивления движению,
 –
динамическая
сила, обусловленная массой и изменением
скорости движения во времени,
–
динамическая
сила, обусловленная массой и изменением
скорости движения во времени,
 –
изменение
скорости движения.
–
изменение
скорости движения.
Вращательное движение тела описывается уравнением, в котором силы F и Fс заменяются моментом М и Мс, а масса моментом инерции I:
Момент инерции I определяется уравнением:

где m – масса всего тела, ρ - радиус инерции.
Радиус инерции – это такое расстояние от центра тяжести тела на котором предполагается сосредоточенной вся масса. Для двигателей и рабочих машин I приводиться в справочниках. Величина и знак определяет значение и направление действия момента М и Мс. Момент электродвигателя М положительный, если он развивает движущийся момент и отрицательный, когда работает в режиме электрического тормоза.
Статические моменты в отношении сопротивлению движения делят на реактивные и активные. Реактивные всегда препятствуют движению (моменты трения, резания горных пород и т.д.). К активным относят моменты от силы тяжести, кручения, сжатия – например – подъемные установки. Активные моменты могут быть тормозящими и движущими. Уравнение движения в общем виде имеет вид:
В системе СИ приведенные величины имеют размерность: момент – Ньютон на метр (Нм) или Джоуль (Дж), сила – Ньютон (Н), угловая скорость – радиан в секунду (рад/с), масса – килограмм (кг), момент инерции – килограмм на метр в квадрате (кгм2).
При
практических расчетах часто используют
не момент инерции, а маховой момент GD2
(кГм2).
Связь между ними:
 ;
;
 ,
тогда
,
тогда
 ,
кгм2.
,
кгм2.
Скорость
вращения электродвигателей дается
обычно в оборотах в минуту – n,
связанную с ω равенством
 .
Выразив уравнение движения через n
получим:
.
Выразив уравнение движения через n
получим: .
.
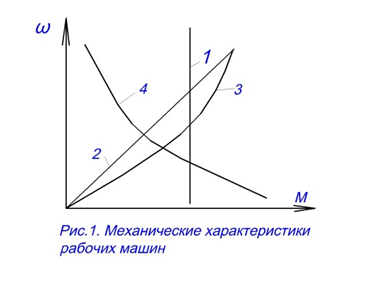
1.2 Механические характеристики рабочих машин
 Для
понимания уравнения движения электропривода
необходимо знать механическую
характеристику двигателя ω
= f (М)
и зависимость момента рабочей машины
от скорости.
Для
понимания уравнения движения электропривода
необходимо знать механическую
характеристику двигателя ω
= f (М)
и зависимость момента рабочей машины
от скорости.
Различают четыре вида механических характеристик рабочих машин, рис. 1:
1)
Не зависящие от скорости механические
характеристики (1) .
Характерны для подъемных машин, поршневых
компрессоров, механизмов передвижения.
Мощность таких машин растет со скоростью.
.
Характерны для подъемных машин, поршневых
компрессоров, механизмов передвижения.
Мощность таких машин растет со скоростью.
2)
Линейно - возрастающие характеристики
 (2).
Такую характеристику имеет генератор
постоянного тока. Здесь мощность
пропорциональна квадрату скорости.
(2).
Такую характеристику имеет генератор
постоянного тока. Здесь мощность
пропорциональна квадрату скорости.
3)
Нелинейно – возрастающие (параболические)
механические характеристики
 (3).
Такую характеристику имеют машины,
преодолевающие сопротивление воздуха
или жидкости (вентиляторы, насосы,
центрифуги). Их мощность примерно
пропорциональна кубу скорости.
(3).
Такую характеристику имеют машины,
преодолевающие сопротивление воздуха
или жидкости (вентиляторы, насосы,
центрифуги). Их мощность примерно
пропорциональна кубу скорости.
4)
Нелинейно – спадающие характеристики
 (4).
Такие характеристики характерны для
металлорежущих станков токарной группы,
стругов, скребковых конвейеров. Мощность,
потребляемая такими машинами, постоянна.
(4).
Такие характеристики характерны для
металлорежущих станков токарной группы,
стругов, скребковых конвейеров. Мощность,
потребляемая такими машинами, постоянна.
1.3 Приведение моментов сопротивления и инерции
 Наиболее
распространенной конструктивной формой
большинства рабочих машин является
сочленение с электродвигателем
посредством редуктора. В этом случае
скорости движения вала рабочей машины
и вала двигателя различны и при
использовании уравнения движения
электропривода все моменты должны быть
приведены к единой скорости или к единому
валу – валу электродвигателя. При
приведении необходимо учитывать потери
в редукторе. Рассмотрим кинематическую
схему, приведенную на рис.2. Двигатель
сочленен с рабочей машиной через редуктор
с передаточным отношением i.
Требуемая мощность на валу рабочей
машины равна:
Наиболее
распространенной конструктивной формой
большинства рабочих машин является
сочленение с электродвигателем
посредством редуктора. В этом случае
скорости движения вала рабочей машины
и вала двигателя различны и при
использовании уравнения движения
электропривода все моменты должны быть
приведены к единой скорости или к единому
валу – валу электродвигателя. При
приведении необходимо учитывать потери
в редукторе. Рассмотрим кинематическую
схему, приведенную на рис.2. Двигатель
сочленен с рабочей машиной через редуктор
с передаточным отношением i.
Требуемая мощность на валу рабочей
машины равна:
 .
.
Мощность на валу электродвигателя, учитывая потери в редукторе, составит:
 .
.
Заменив
мощность через момент
 и угловую скорость двигателя ω,
получим:
и угловую скорость двигателя ω,
получим:
Решив уравнение относительно , получим:
где -
передаточное число редуктора.
-
передаточное число редуктора.
При
работе электродвигателя в тормозном
режиме КПД передачи следует записывать
в числителе, так как поток энергии имеет
обратное направление, т.е.:
 .
.
Приведение
моментов инерции, как правило, к валу
электродвигателя основано на том, что
величина суммарного запаса кинетической
энергии, отнесенная к валу двигателя,
постоянна. Кинетическая энергия:

После
преобразования этого уравнения получим
момент, приведенный к валу двигателя
 :
:
В механизмах имеющих вращательно и линейно – движущиеся части (носовые лебедки драг) для получения суммарного момента на валу электродвигателя нужно инерционные силы поступательного движения и силы сопротивления поступательному движению привести к вращательному движению, рис.3.
где
 -
сила сопротивления механизма
поступательному движению, отсюда
-
сила сопротивления механизма
поступательному движению, отсюда
Приведение
поступательно движущихся масс
осуществляется на основе равенства
закона кинетической энергии
Отсюда
 при обратном приведении
при обратном приведении
 .
.