

4.4 Тормозные режимы асинхронных электродвигателей
Торможение
асинхронных электродвигателей возможно
в трех режимах: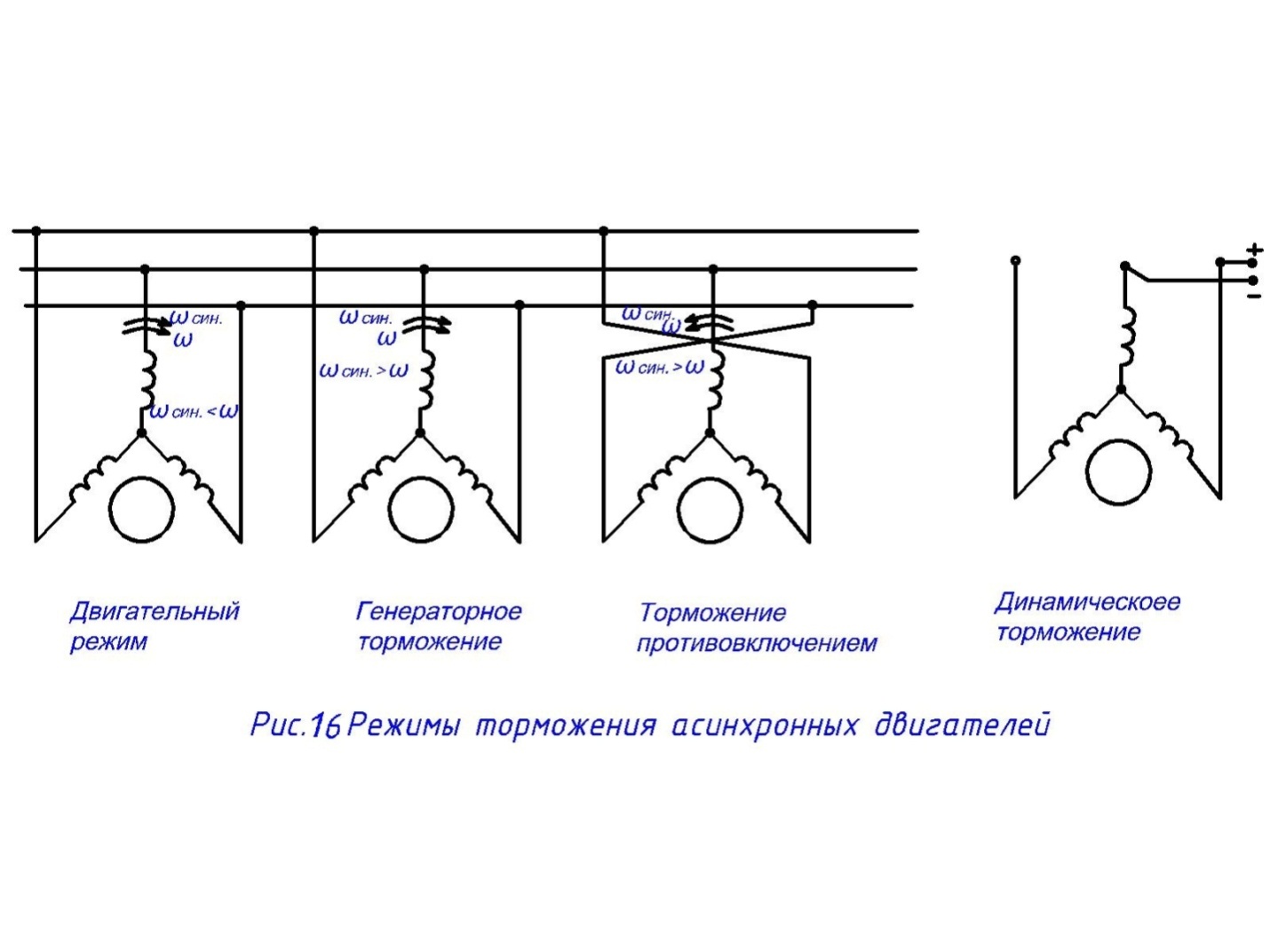 генераторном, динамическом, торможении
противовключением, а соответствующие
схемы включения приведены на рис.16.
генераторном, динамическом, торможении
противовключением, а соответствующие
схемы включения приведены на рис.16.
Генераторное
(рекуперативное) торможение возможно
при вращении ротора со скоростью выше
синхронной, при этом скольжение
отрицательное


Торможение используется в подъемных установках, эскалаторах, метро, электровозах.
Механические
характеристики расположены во втором
квадранте и являются продолжением
механических характеристик двигательного
режима, рис.17. Достоинства рекуперативного
торможения – возврат энергии в сеть,
надежность; недостаток – невозможность
торможения при
 .
.
Режим
противовключения. Ротор электродвигателя
вращается в противоположном направлении
вращению поля статора, поэтому скольжение
будет иметь положительное значение
 т.к.
т.к.
 ,
то это значит, что мощность на валу
ротора будет отрицательной, т.е. она
берется от рабочей машины. Электродвигатель,
преобразуя механическую энергию,
работает генератором, одновременно он
потребляет мощность из сети, следовательно,
электродвигатель расходует суммарную
мощность, которая рассеивается в виде
тепла. Механические характеристики
располагаются в четвертом квадранте,
переход в режим торможения возможен в
подъемных установках. Если момент
электродвигателя сделать меньшим
статического, то под действием груза
ротор принудительно будет вращаться в
сторону противоположную вращению поля
статора.
,
то это значит, что мощность на валу
ротора будет отрицательной, т.е. она
берется от рабочей машины. Электродвигатель,
преобразуя механическую энергию,
работает генератором, одновременно он
потребляет мощность из сети, следовательно,
электродвигатель расходует суммарную
мощность, которая рассеивается в виде
тепла. Механические характеристики
располагаются в четвертом квадранте,
переход в режим торможения возможен в
подъемных установках. Если момент
электродвигателя сделать меньшим
статического, то под действием груза
ротор принудительно будет вращаться в
сторону противоположную вращению поля
статора.
На рис.18. во втором квадранте показана механическая характеристика (3) для остановки механизма, полученная противовключением двигателя. Механическая характеристика (2), расположенная в четвертом квадранте, полученная при введении добавочного сопротивления, характерна для случаев опускания грузов.
Достоинства торможения противовключением – надежность, возможность полной остановки, быстрое торможение.Недостатки – выделение большой мощности на электродвигателе, возможность реверса.
Динамическое
торможение. При динамическом торможении
обмотки статора электродвигателя
отключают от сети переменного тока и
на одну из фаз подают напряжение от
источника постоянного тока. Постоянный
ток, протекая по обмоткам статора,
создает в нем неподвижное магнитное
поле, при пересечении которого во
вращающих обмотках ротора наводится
ЭДС имеющая переменный характер. Это
ЭДС в обмотках ротора вызывает переменный
ток, который взаимодействует с полем
статора, создает тормозной момент. При
полной остановке двигателя ЭДС в роторе
равна нулю. Механические характеристики
в режиме динамического торможения
приведены на рис. 19.

Расчётное задание №2
 По
расчётной модели двигателя, полученной
при выполнении контрольного задания
№1 (пункты 3.1.1. и 3.1.2.) выбрать асинхронный
двигатель с фазным ротором по справочным
данным, приведённым в таблице №9 из
условия, что
По
расчётной модели двигателя, полученной
при выполнении контрольного задания
№1 (пункты 3.1.1. и 3.1.2.) выбрать асинхронный
двигатель с фазным ротором по справочным
данным, приведённым в таблице №9 из
условия, что
 .
.
Для выбранного двигателя проделать пункты 3.1.5, 3.1.6, 3.1.7, 3.1.8.
Начертить схему пуска, механические характеристики режимов генераторного торможения, динамического торможения и характеристику торможения противовключением. Все характеристики построить в одних осях.
При определении синхронной скорости, число пар полюсов «Р» асинхронного двигателя берётся равным последней цифре в обозначении двигателя, разделенной на два. Например, двигатель АК-112-6. Число пар полюсов у двигателя равно 3.