Лабораторная работа №1 / laba1_отчет
.docМинистерство общего и профессионального образования Российской Федерации
Уфимский государственный авиационный технический университет
Кафедра АПрИС
Лабораторная работа № 1
по дисциплине «Теория автоматического управления».
Исследование типовых динамических звеньев и принципов управления САУ.
Вариант 3.
Выполнили: студентки гр. ИВТ – 324
Данилина А.О.
Пашпекина М.В.
Проверила: преподаватель
Саитова Г.А.
Уфа
2008
Исходные данные:
|
Апериод. звено 1 |
Апериод. звено 2 |
Апериод. звенок 2 порядка (колебательное) |
Интегр. звеное |
Изодромное звено |
Реальное дифф. звено |
Koc |
||||||
|
k1 |
T2 |
k2 |
T2 |
k |
T |
ξ |
k |
k1 |
k2 |
k |
τ |
|
|
4 |
0.4 |
7 |
0.07 |
3 |
0.4 |
2.5 (0.25) |
4 |
4 |
0.8 |
4 |
0.5 |
0.3 |
-
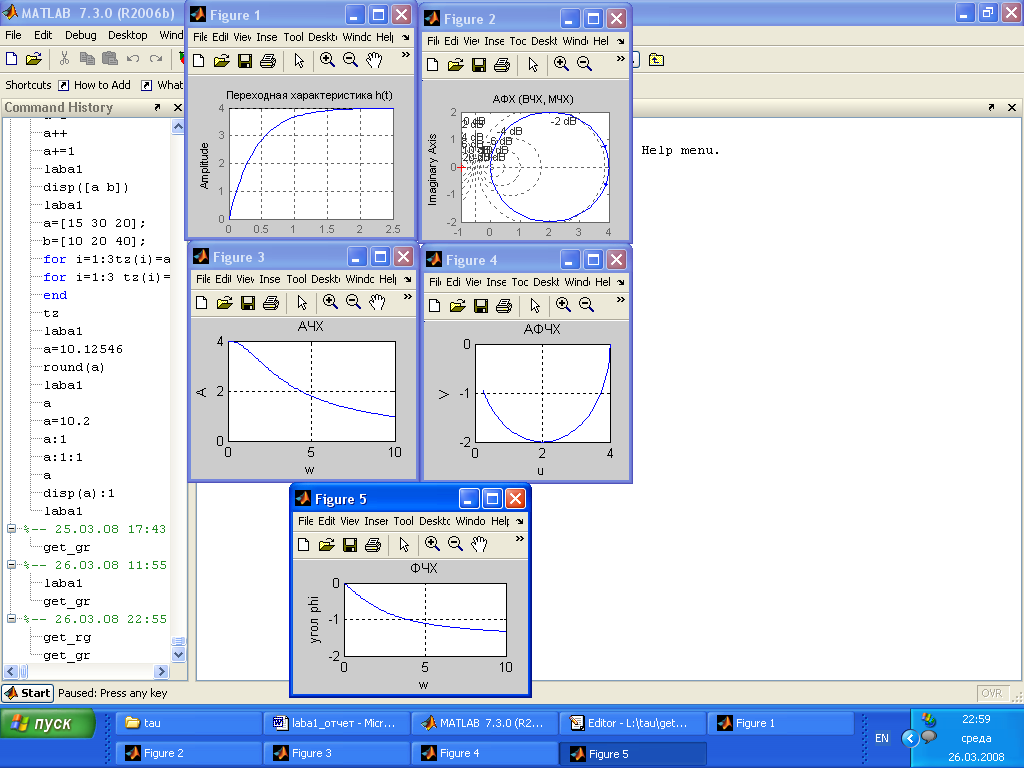
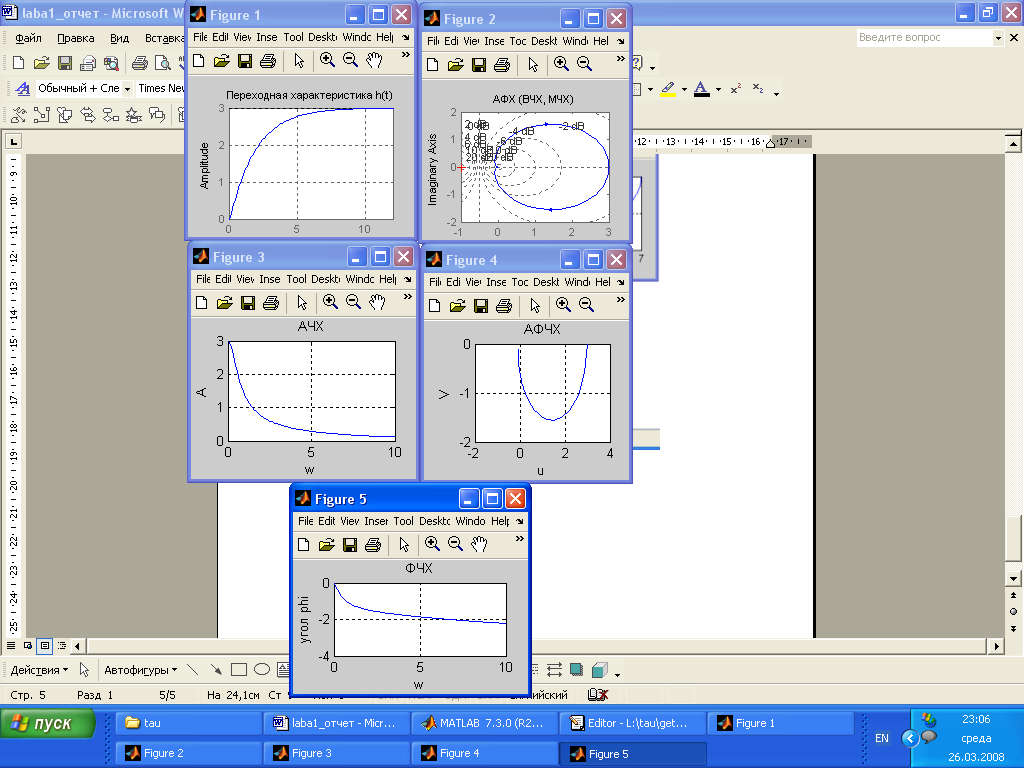
Используя пакет прикладных программ MATLAB для исследования САУ, путем моделирования получить графики переходной h(t) функции и частотных характеристик (АФХ, АЧХ, ФЧХ, ВЧХ, МЧХ) трех типов звеньев (позиционных, интегрирующих и дифференцирующих).
Листинг программы (M-файл get_gr.m ):
%%Сценарий формирует передаточные функции для заданных звеньев и строит
%%характеристики
%%При вызове на экран выводится передаточная функция соответствующего звена
%%и открываются три оконные формы с графиками Переходной характеристики,
%%АФХ, АЧХ, ФЧХ, ВЧХ и МЧХ
% %num=[b0 b1 ... bn] - коэффициенты числителя
% %den=[a0 a1 ... am] - коэффициенты знаменателя
for i=1:6
switch i
case 1
disp('Апериодическое звено 1го порядка')
num=[4];
den=[0.4 1];
%апериодическое звено 1го порядка
case 2
disp('Апериодическое звено 1го порядка')
num=[7];
den=[0.07 1]; %апериодическое звено 1го порядка (второй вариант)
case 3
disp('Апериодическое звено 2го порядка')
num=[3];
den=[0.16 2 1]; %апериодическое звено 2го порядка
case 4
disp('Интегрирующее звено')
num=[4];
den=[1]; %интегрирующее звено
case 5
disp('Издодромное звено')
num=[0.8 4];
den=[1 0]; %изодромное звено
case 6
disp('Дифференцирующее звено')
num=[4 0];
den=[0.5 1]; %дифференцирующее звено
end
sys=tf(num, den) %формирование передаточной функции
disp('*************************************************')
%построения характеристик
figure(1); step(sys); grid; %переходная характеристика h(t)
figure(2); nyquist(sys); grid; %АФХ системы (включает ВЧХ и МЧХ)
w=0:0.1:10; %шаг
apk=freqs(num,den,w); %вычисление АФЧХ
figure(3); a=abs(apk); plot(w,a); grid; %АЧХ
figure(4); u=real(apk); v=imag(apk); plot(u,v); grid; %АфЧХ в комплексной форме
figure(5); phi=unwrap(angle(apk)); plot(w, phi); grid; %ФЧХ в рад/с
pause;
end
Результаты моделирования:
-
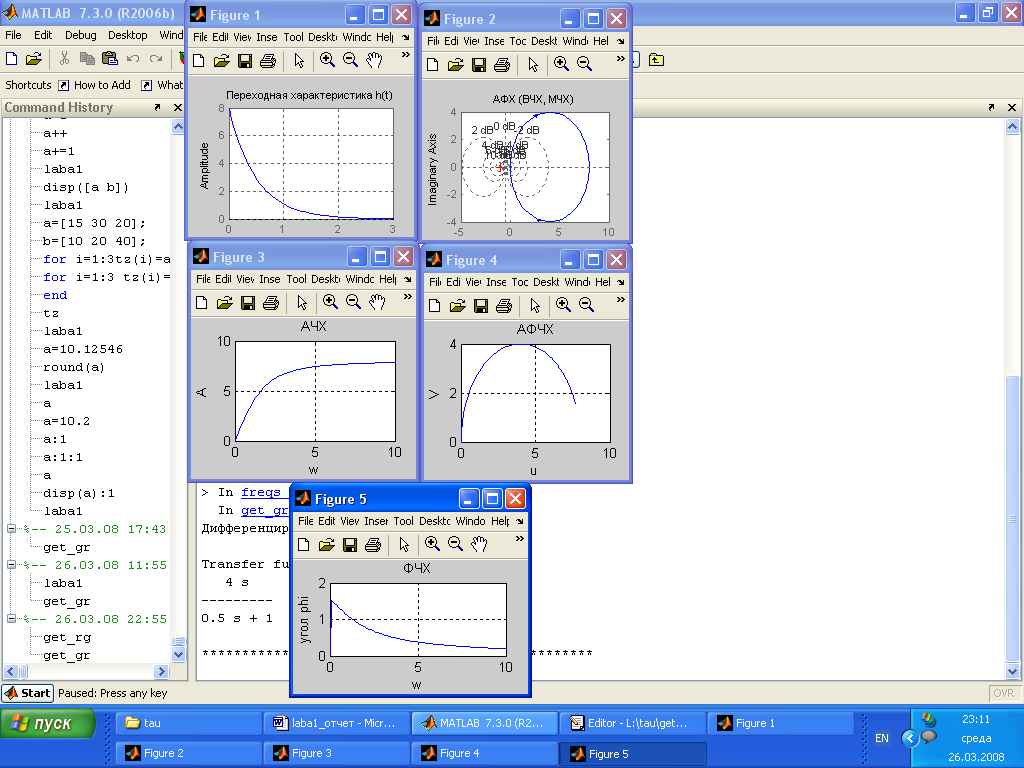
Апериодическое звено 1
Transfer function:
4
---------
0.4 s + 1
-
Апериодическое звено 1го порядка
Transfer function:
7
----------
0.07 s + 1

-
Апериодическое звено 2го порядка
Transfer function:
3
------------------
0.16 s^2 + 2 s + 1
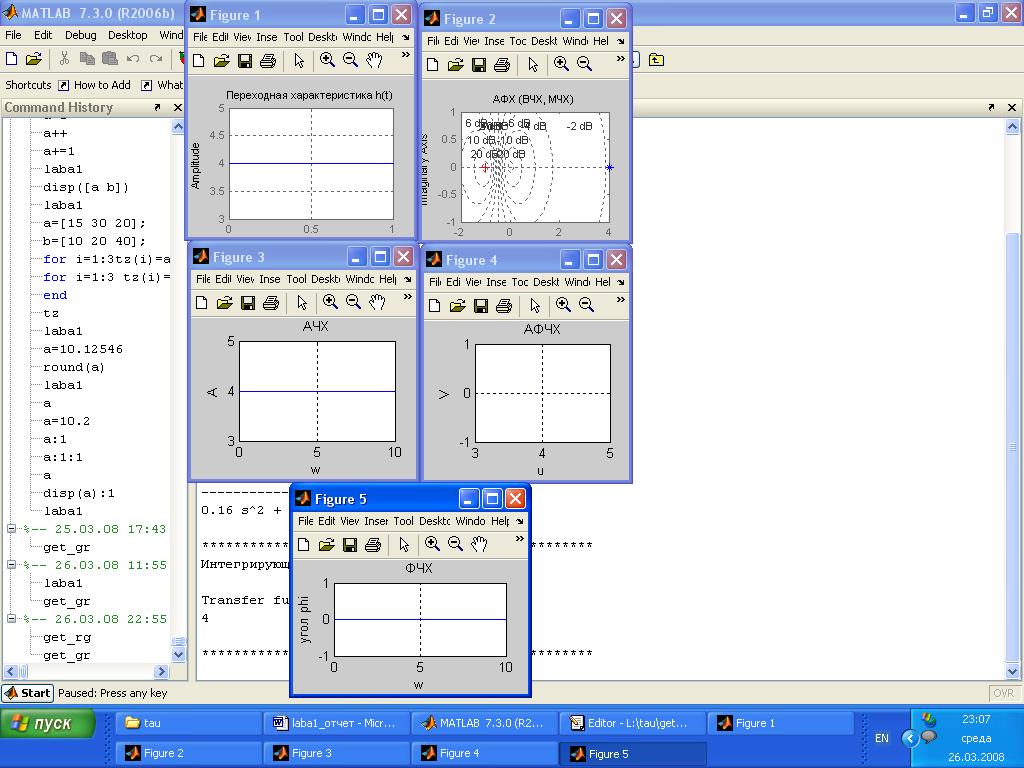
-
Интегрирующее звено
Transfer function:
4
-
Изодромное звено
Transfer function:
0.8 s + 4
---------
s

-
Дифференцирующее звено
Transfer function:
4 s
---------
0.5 s + 1
-
Если для колебательного звена изменить коэффициент затухания на ξ=0,25, то его характеристики будут выглядеть следующим образом:
Transfer function:
3
--------------------
0.16 s^2 + 0.2 s + 1

-
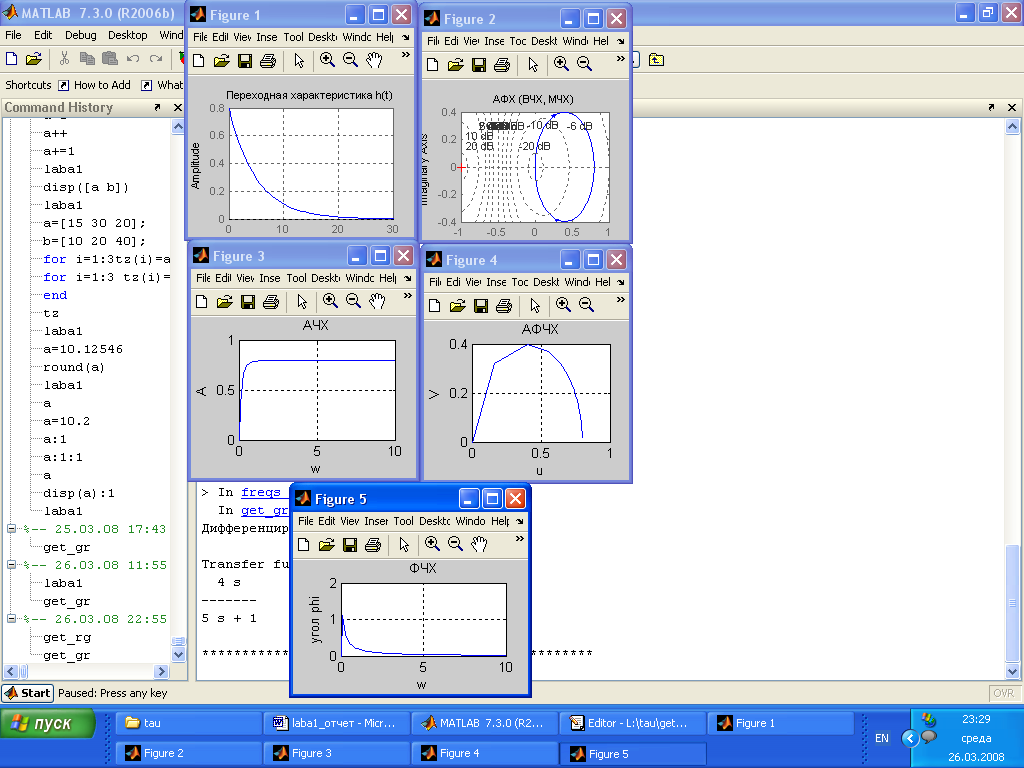
Если для реального дифференцирующего звена изменить постоянную времени на τ=5
Transfer function:
4 s
-------
5 s + 1
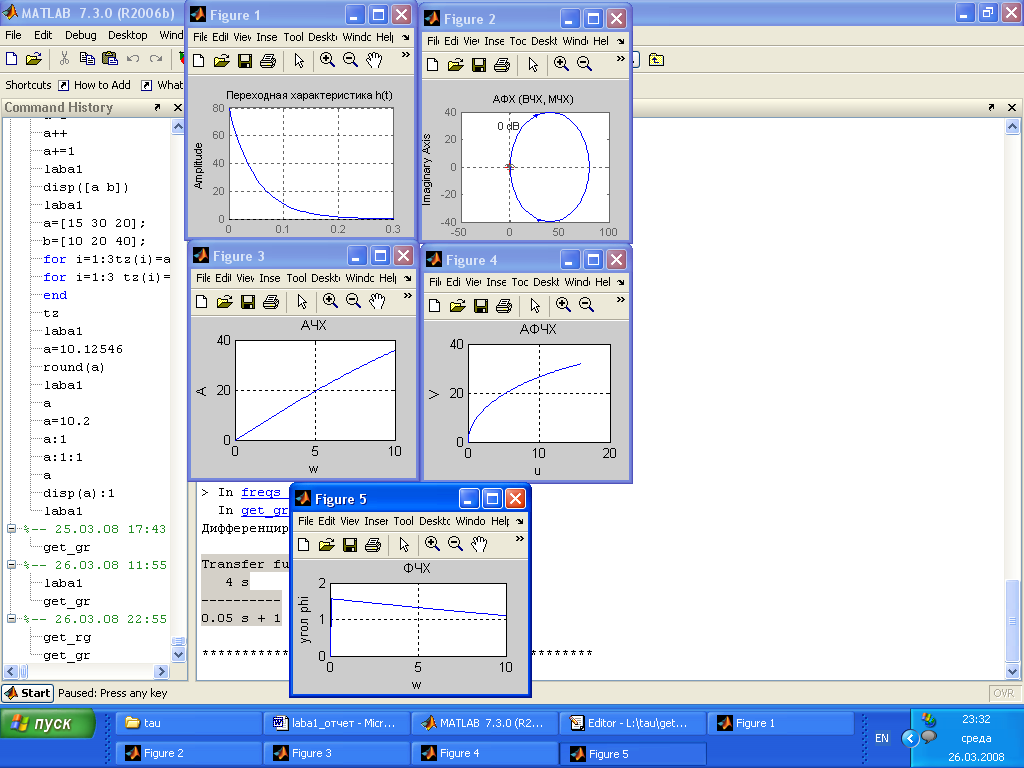
Если для реального дифференцирующего звена изменить постоянную времени на τ=0,05
Transfer function:
4 s
----------
0.05 s + 1
5. Принцип разомкнутого управления
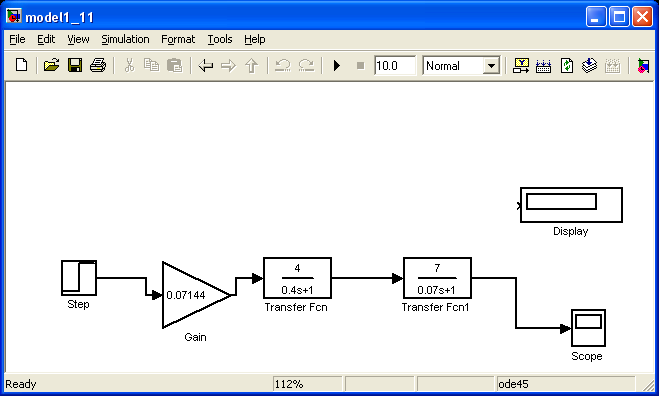

Выходному сигналу yвых=2 соответствует коэффициент усиления k=0,07144
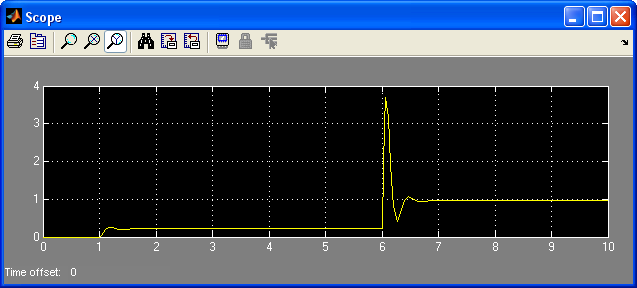
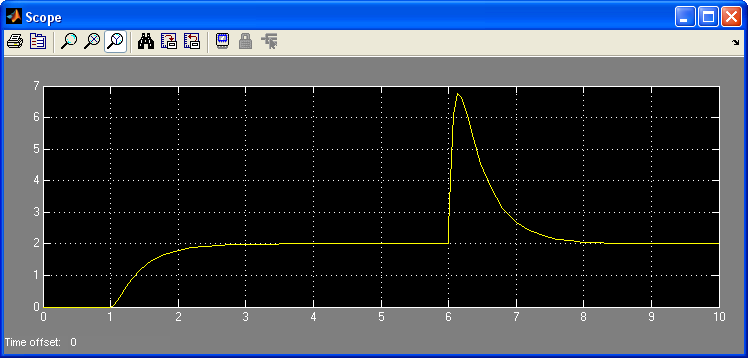
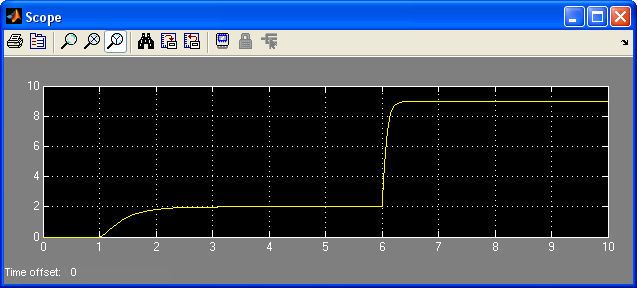
6. Принцип компенсации
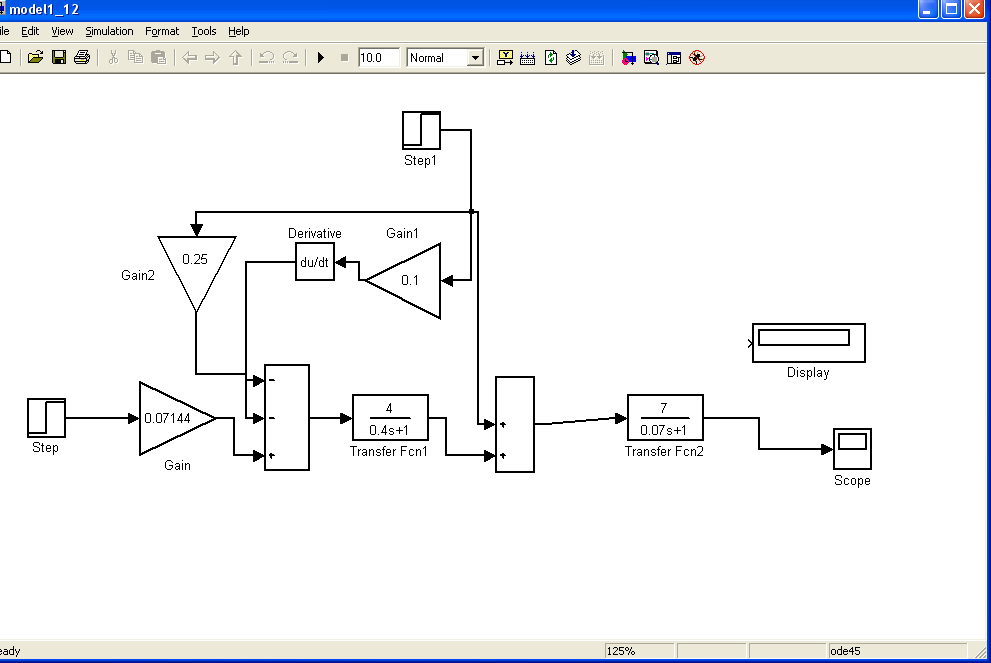
В отсутствие компенсатора график будет выглядеть следующим образом (возмущающее воздействие подается с момента времени t=6):
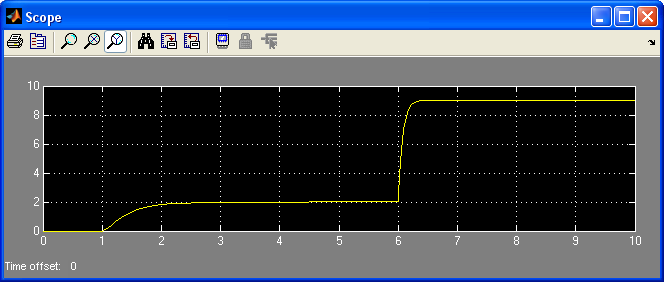
При наличии компенсатора:
7. Принцип управления по обратной связи
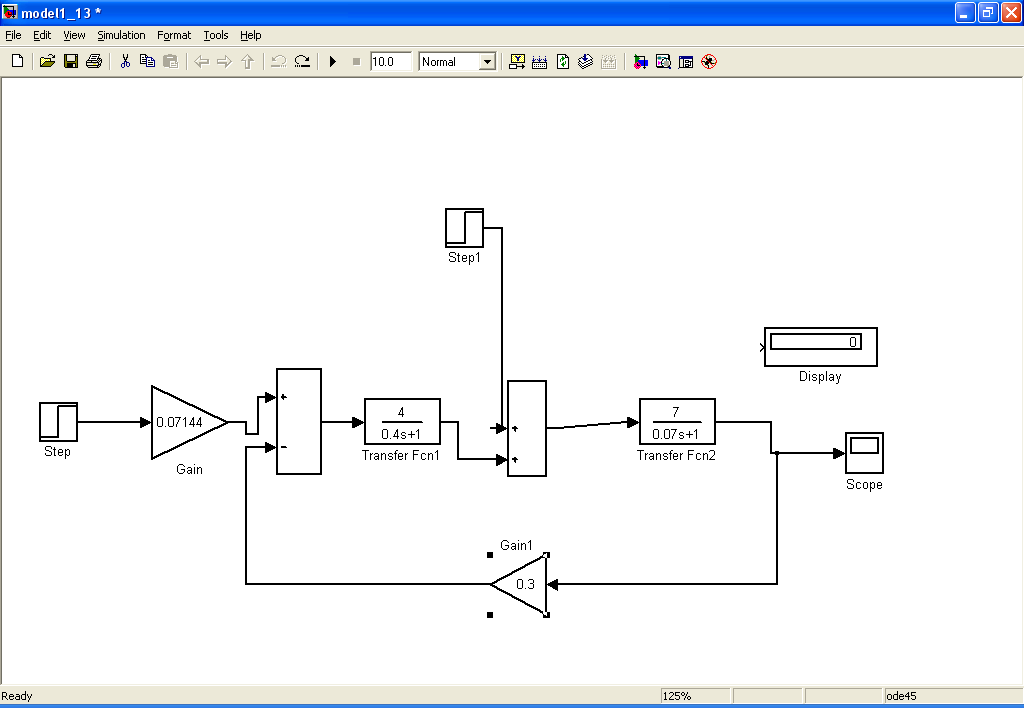
Без ОС:
С ОС: