

6. Анализ устойчивости некорректированной сар.
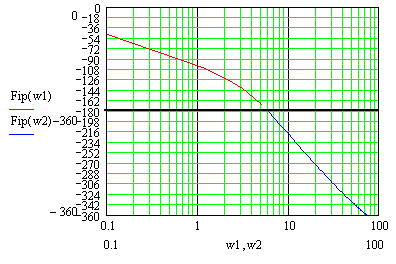
Анализ устойчивости произведём, используя логарифмические частотные характеристики, логарифмическим критерием устойчивости Найквиста. Для этого построим ЛАХ и ЛФХ разомкнутой системы.

Тогда: ЛАХ и ЛФХ
L(дб)
 lg(w)
lg(w)
(град)
 lg(w)
lg(w)
При анализе построенных ЛЧХ и ЛФХ видим, что нескорректированная система является неустойчивой, т.к. ЛФХ пересекает –180 раньше, чем ЛАХ пересекает 0.
Следовательно, необходима коррекция САУ путем введения корректирующего устройства (КУ).
7. Синтез сар с заданными показателями качества.
Можно применить, например, последовательное интегро-дифференцирующее звено с передаточной функцией
W(p)=![]()
Примером интегродифференцирующего контура может служить схема
























Логарифмические характеристики полученной системы:
L(дб)
 lg(w)
lg(w)
(град)
 lg(w)
lg(w)
Из графиков видно, что система имеет хорошие запасы устойчивости по модулю порядка 12 дб, по фазе порядка 53°. Быстродействие позволит системе быстро реагировать на возмущения, а параметры устойчивости не позволят вывести САР из равновесия.
8. Анализ качества сар.
Проанализируем переходные процессы в синтезированной САР:
Для разомкнутой САР:
Переходной процесс выходной координаты при максимально возможном изменении управляющего воздействия для разомкнутой САР(на 150 с):
T, °С
 t
, с
t
, с
Переходный процесс выходной координаты при максимальном скачке возмущения(на 150 с):
T, °С
 t,
с
t,
с
Для замкнутой разработанной САР.
Переходной процесс выходной координаты при максимально возможном изменении управляющего воздействия для замкнутой САР(на 6 с):
T, °С T, °С
 t,с
t,с
 t,с
t,с
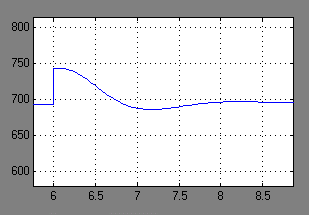
Переходный процесс выходной координаты при максимальном скачке возмущения(на 6 с):
T, °С T, °С
 t,с
t,с
 t,с
t,с
Графики переходных процессов наглядно показывают, что спроектированная САР удовлетворяет всем требованиям точности и быстродействия. Время переходного процесса 3 с, перерегулирование 14%.
9. Анализ наблюдаемости сар.
![]()
![]() ,
отсюда получим:
,
отсюда получим:
![]()
![]()
![]()
0 1 0 0 0 0
0 0 1 0 0 0
0 0 0 1 0 0
A:= 0 0 0 0 1 B:= 0
-183150 -531135 -257857 -13626.37 -210.4 146.04
1 0
0 1
CT:= 0 AT*CT:= 0 ……
0 0
0 0

![]() ,
n=5
,
n=5

Система вполне наблюдаема, т.к. rank(v) = n.
Ф=[B A*B A*A*B A*A*A*B A*A*A*A*B]
Ф =1.0e+011 *
0.0000 -0.0000 0.0034 -0.1495 6.7040
0 0.0000 -0.0000 0.0034 -0.1495
0 0 0.0000 -0.0000 0.0034
0 0 0 0.0000 -0.0000
0 0 0 0 0.0000
> rank(Ф)
ans =5
Система вполне управляема, т.к. rank(Ф) = n = 5.