

Лекции по ТАУ1
.pdfТеория автоматического управления (лекции) п.п. all.doc |
41 |
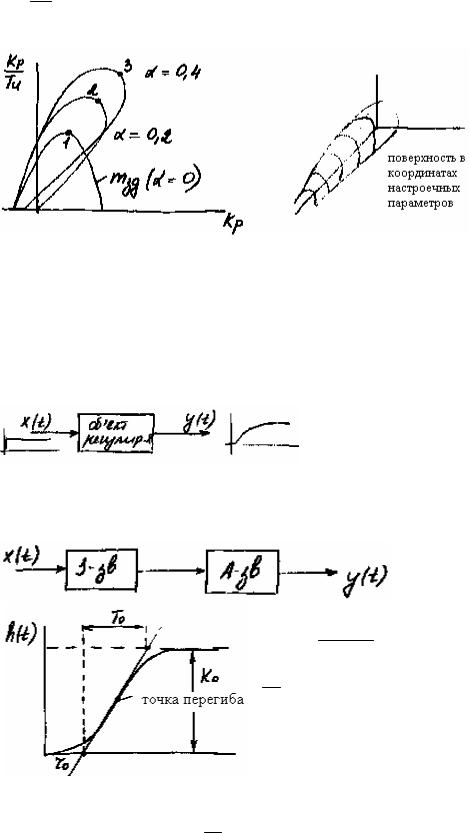
8.7.3. Выбор оптимальных настроечных параметров (kp, kи) на линии заданного запаса устойчивости (mзадан.).
Для точки с координатами (kp,opt ,kи,opt )линейный интегральный критерий Iл ® min
¥
Iл = ò y(t)dt ® min
0
Передаточная функция, относительно l(t):
Wз.с. |
(р) |
= |
|
|
|
Wo (р) |
|
|
|
|
|
= |
|
y(p) |
|
|
|
|
|
|
||||||||
1 |
+ Wo |
(р)× Wp (р) |
|
l(р) |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
y(p) = Wз.с. (р)× l(р) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
¥ |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l(р) |
= òl(t)× e-s×t dt = |
|
|
|
|
[s = p] |
|
|
|
|
|
|||||||||||||||||
p |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
0 |
|
|
Wo (р) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
y(p) |
= |
|
|
|
|
|
|
|
|
|
× |
1 |
|
|
[*] |
|
||||||||||||
1 + W (р) |
æ |
|
|
|
|
k |
ö |
р |
|
|
||||||||||||||||||
|
|
|
|
× çk |
p |
+ |
|
|
и |
÷ |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
o |
ç |
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
р ø |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
14243 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Wр (р) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
¥ |
|
|
|
|
|
|
|
|
|
|
|
¥ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
у(р) |
= ò у(t)× e{-s×t dt |
|
|
|
= ò у(t)× dt Þ |
|
|
|||||||||||||||||||||
|
|
|
0 |
|
|
1 |
|
s®0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
y(s) |
|
|
= Iл = |
|
поделим [*]на Wo (s), |
|
|
= |
1 |
|||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
|
s®0 |
|
|
|
|
kи |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
перемножим с s |
|
|
|
|
||||||||||||||
8.7.4. Сравнительный анализ переходных процессов в АСР с ПИ-регулятором.
ПИ-регулятор (граница заданного запаса
устойчивости m = 0.366 )
l(t) = 1.0
точки 2,3,4,5 настройки ПИ-регулятора;
точка 1 соответствует И-регулятору (частный случай) точка 3 – opt Iл ® min
точка 6 – П-регулятор.
Теория автоматического управления (лекции) п.п. all.doc |
42 |
|
|
|
|
|
|
|
8.8. Особенности настройки ПИД-регулятора. |
|
W |
(s) = k |
+ |
kp |
× |
1 |
+ k × Т |
× s |
|
Т |
|
s |
||||||
ПИД |
{p |
|
и |
|
1p23д |
|
||
|
П |
|
|
|
|
Д |
|
|
|
|
{ |
|
|
|
|||
|
|
|
И |
|
|
|
|
|
ПИ – частный случай ПИД при Тд = 0
a = Тд , (a = 0; 0.2;0.4;K)
Ти
Тд = a × Ти ® подставляем в [*]
a |
0 |
0.2 |
0.4 |
|
kp |
K |
K |
K |
Из них выбирают требуемые по заданному качеству. |
Ти |
K |
K |
K |
|
Тд |
0 |
K |
K |
|
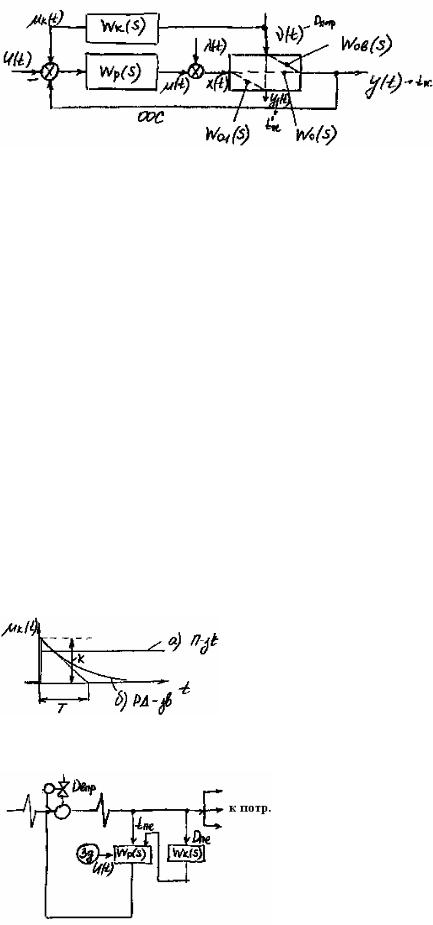
8.9. Приближенные методы расчета настроек ПИ и ПИД регуляторов.
Метод ВТИ (всероссийский теплотехнический институт) по экспериментальным кривым.
Снимается несколько кривых.
1.экспериментально определяется кривая разгона (ансамбль кривых разгона)
2.обработка с целью получения переходных характеристик h(t)
3.кривая разгона аппроксимируется:
Wo (s) = To k× so + 1 × e-to ×s
to = K
To
4. Для такого типа объектов (как в РЗ) по формулам из таблицы определяется kр ,Ти ,Тд
Исходные данные: kо ,То ,tо , tТо

Теория автоматического управления (лекции) п.п. all.doc |
43 |
|
|
|
|
0 p |
tо |
£ 0.2 |
|
|
|
0.2 p |
tо |
£ 1.5 |
|
|
|
|||
Параметр |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
То |
|
|
|
|
|
|
То |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
П |
|
|
ПИ |
|
ПИД |
|
П |
ПИ |
ПИД |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
kp |
|
0.8 × To |
|
0.6 × To |
|
1.0 × To |
|
0.38 × (to + 0.6 × To ) |
0.38 × (to + 0.6 × To ) |
0.22 × (to + 1.5 × To ) |
||||||||
|
ko |
× to |
|
ko × to |
|
ko × to |
|
ko × (to - 0.08 × To ) |
|
ko × (to - 0.68 × To ) |
|
ko × (to - 0.13 × To ) |
|
|||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Ти |
|
|
- |
|
3.3 × tо |
|
2.5 × tо |
- |
|
0.8 × То |
0.45 × То |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Тд |
|
|
- |
- |
|
|
0.2 × Ти |
- |
|
- |
|
|
0.2 × Ти |
|||||
a = (0.2 ¸ 0.3) - на практике.
5. Построить переходный процесс.
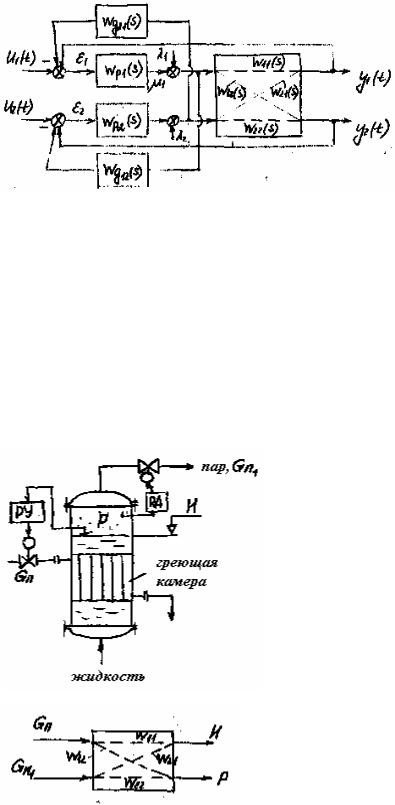
9. Системы управления с дополнительными информационными сигналами.
9.1. Характеристика объекта управления.
u1 (t),K,un (t),y1 (t),K,ym (t) - дополнительные информационные сигналы
← структура объекта
u1 (t),K,un (t) - внешние возмущения, доступные для измерения (на входе).
y1 (t),K,ym (t) - промежуточные (вспомогательные) параметры на выходе объекта.
y(t) - основной регулируемый параметр x(t) - основное управляющее воздействие
ПРИМЕР: паровой барабанный котел, работающий на общую паровую магистраль.
1 – впрыскивающий пароохладитель tпе - температура перегретого пара
t′пе - промежуточное измерение температуры перегретого пара  Значит, что, например, Dпотр влияет и на tпе , и на t′пе .
Значит, что, например, Dпотр влияет и на tпе , и на t′пе .
Теория автоматического управления (лекции) п.п. all.doc |
44 |
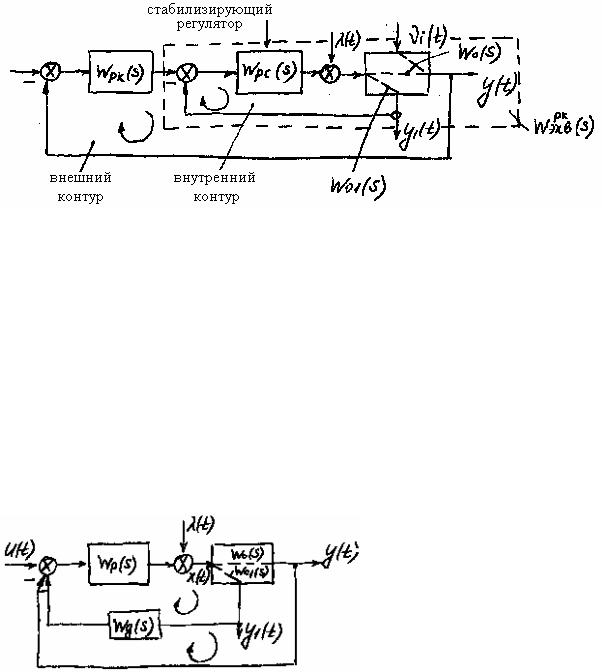
9.2. АСР с компенсацией внешних возмущений.
компенсатора, как только изменится
Þ tпе = const .
Порядок настройки:
1. Настроить Wp (s) обычным путем.
Wk (s) - передаточная функция
устройства компенсации.
Если потребитель изменит потребление пара, то tпе
изменится. Без компенсатора, регулятор бы, в конце концов, вернул бы tпе в норму, но через
какое-то время. При наличии Dпотр. (n(t)), компенсатор выдает задание регулятору
2. Из условия инвариантности выбираем структуру и параметры Wk (s).
Условие инвариантности: y1 (t) = n(t)× Wов (s)
С другой стороны: y2 (t) = n(t)× Wк (s)× Wр (s)× Wо (s) y1 (t) = y2 (t) = y(t)
Wk |
(s) = |
|
Wов (s) |
|
|
|
|
|
|||
Wр |
(s)× Wо (s) |
|
|
|
|
||||||
|
|
|
|
|
|
||||||
Если точно |
реализовать Wk (s), то отклонение tпе |
|
на выходе не будет даже при наличии |
||||||||
возмущений. |
|
|
|
|
|||||||
На практике: |
|
kов |
|
|
|||||||
а) |
Wk (s) = kп (т.е. П-звено) Þ kп = Wk (s) |
|
s→0 |
= |
|
, где |
|||||
|
|
||||||||||
|
kр × k |
|
|||||||||
|
|
|
о |
||||||||
|
|
|
|
|
|
|
|
|
|||
|
kр - коэффициент передачи регулятора |
|
|
|
|
||||||
|
kо ,kов - коэффициенты передачи объекта по каналам |
||||||||||
б) |
W (s) = |
k × T × s |
, где k,T - параметры РД-звена. |
|
|
||||||
|
|
|
|||||||||
|
k |
|
T × s + 1 |
|
|
|
|
||||
|
|
|
|
|
|
|
|||||
ПРИМЕР:
Зд – задание регулятору.
Рассмотренные АСР с компенсацией относятся к числу одноконтурных.
Теория автоматического управления (лекции) п.п. all.doc |
45 |
9.3. Многоконтурные АСР
(с использованием промежуточных параметров y1(t)÷ ym(t)).
В промышленности, как правило, применяются двухконтурные АСР.
9.3.1. Каскадная двухконтурная АСР.
Порядок расчета:
1.Отключить Wpк (s) (корректирующий регулятор).
2.Обычным способом определяются настройки Wpс (s) по Wо1 (s).
3.По эквивалентному объекту Wркэкв (s) определяются настройки Wpк (s):
Wэкв (s) = |
|
Wрс (s)× Wо (s) |
|
|
+ Wрс (s)× Wо (s) |
||
рк |
1 |
||
|
|||
4. Уточнение настроек Wpс (s) и Wpк (s): |
|||
Wркэкв (s) = Wо1 (s)+ Wо (s)× Wрк (s)Þ Wрс (s)® настройки и т.д.
ПРИМЕР: см. раздел о схемах регулирования.
9.3.2. АСР с дифференциатором.
|
W (s) = |
k д × Tд × s |
- РД-звено |
||||||||||
|
|
|
|
||||||||||
|
д |
|
Tд × s + 1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||
|
Wр (s) = kр + |
|
kр |
|
- ПИ-регулятор |
||||||||
|
Ти × s |
||||||||||||
1 |
= |
1 |
+ |
|
|
1 |
|
|
|||||
|
W (s) |
|
k |
д |
k |
д |
× T × s |
|
|||||
|
д |
|
|
|
|
|
|
д |
|||||
Если обозначить |
1 |
= kр1 , а Тд = Ти1 , то получим ПИ-регулятор. |
|||||||||||
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
k д |
|||
Теория автоматического управления (лекции) п.п. all.doc |
46 |
Эквивалентная структура АСР с дифференциатором.
Эквивалентная структура соответствует каскадной двухконтурной. |
|||
Если найти kр1 , то легко найти и k д . |
|||
Wэкв (s) = |
1 |
|
|
Wд (s) |
|||
рк |
|||
|
|
||
экв ( ) |
= Wд |
( |
) |
|
( |
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wрк s |
s |
|
|
× Wр s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Порядок настройки: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
экв ( ) |
→ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1. Настройка Wрк |
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Wэкв (s) |
|
|
|
Wэкв (s)× W |
(s) |
|
- эквивалентный объект для Wэкв (s) |
|
|
|
|
|
|
|
|
||||||||||||||
= |
|
|
|
рк |
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
1 + W |
экв (s)× W |
(s) |
|
|
|
|
|
|
|
|
||||||||||||||||||
об |
рк |
|
|
|
|
|
|
|
|
|
|
|
рк |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
рк |
о1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Считаем, что k |
экв ññ 1 . Тогда Wэкв (s) |
рк |
» |
Wо (s) |
, W (s) и W |
(s) известны; k |
д |
= |
1 |
; Т |
д |
= Т |
и |
. |
|||||||||||||||
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
рс |
|
|
|
|
|
|
об |
|
Wо1 (s) |
|
о |
о1 |
|
|
kр |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2. Настройка W (s) по Wэкв |
(s) = |
|
см. рисунок выше |
|
= W |
(s)× W |
(s)+ W (s) |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
p |
|
|
об |
|
|
|
|
|
|
|
|
|
|
о1 |
д |
о |
|
|
|
|
|
|
|
|
Для уточнения настроек может быть применена итерационная процедура.
ПРИМЕР:
АСР температуры перегретого пара (с дифференциатором). Если не будет t′пе и Wд (s), то получится простая
одноконтурная схема. ПП – пароперегреватель.
Требования к уровню температуры перегретого пара жесткие: отклонения + 5o С;-10o С, не более.
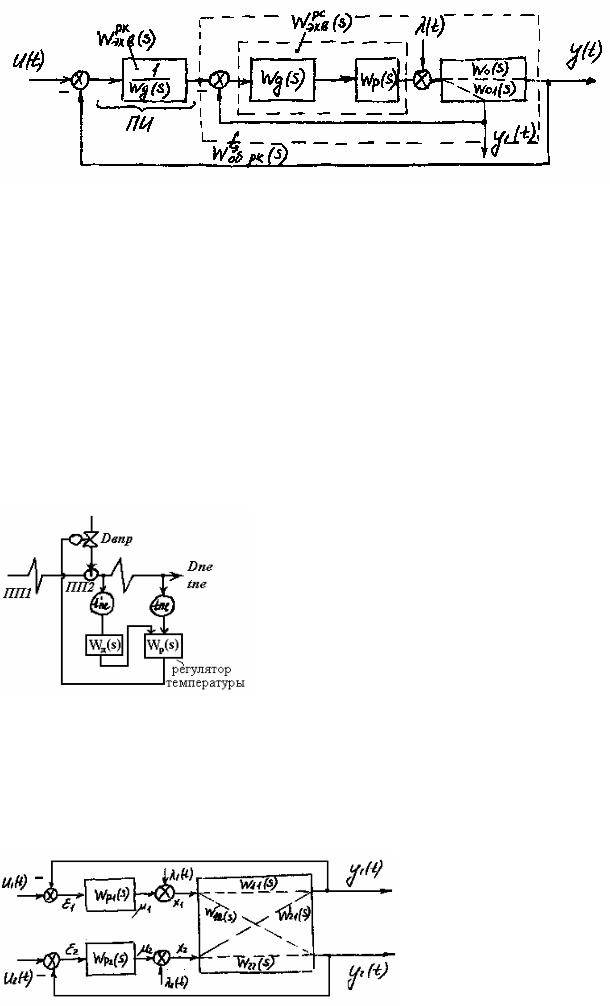
9.4. Многомерные АСР.
Многомерные системы рассмотрим на примере двухмерной АСР. Различают: 1. многомерные системы несвязанного регулирования
2. автономные многомерные АСР
9.4.1. Двухмерная АСР несвязанного регулирования.
Настройка Wр1 (s) и Wр2 (s):
1. Если можно пренебречь связями
W12 (s) и W21 (s), то Wр1 (s)
настраивается по W11 (s), а Wр2 (s)
настраивается по W22 (s).
2. Пренебречь связями невозможно.
Теория автоматического управления (лекции) п.п. all.doc |
47 |
Тогда настройка по Wэкв |
(s) с учетом связей, с использованием итерационных процедур. |
||||||||||
|
|
|
об |
|
|
|
|
|
|
|
|
а) Wр1 (s) → по W11 (s) |
|
|
|
|
|
|
|
||||
б) W |
(s) → по W |
|
(s) = W (s) |
- |
W21 (s)× Wр1 (s)× W12 (s) |
|
|
||||
|
|
||||||||||
р2 |
|
экв.,2 |
|
22 |
{ |
1 |
+ Wр1 (s)× W11 (s) |
||||
|
|
|
|
|
т.к. ООС |
||||||
в) Уточнение: W |
(s) → по W |
(s) = W |
(s) - |
W12 (s)× Wр2 (s)× W21 (s) |
|||||||
|
|
|
|||||||||
|
р1 |
|
|
|
экв.,1 |
|
11 |
{ |
1 + Wр2 (s)× W22 (s) |
||
|
|
|
|
|
|
|
|
т.к. ООС |
|||
9.4.2. Автономная двухмерная АСР.
Условие инвариантности:
1.l1 (t):
W12 (s)- Wд,12 (s)× Wp2 (s)× W22 (s) = 0 Þ Wд,12
Автономная многомерная АСР подразумевает в составе устройство компенсации.
Wд,12 (s) и Wд,21 (s) - устройства динамической связи (устройства компенсации).
Структура Wд,12 (s) и Wд,21 (s) определяется из условия инвариантности (см. п. 9.2.)
(s) = |
|
W12 (s) |
|
|
W |
(s)× W |
(s) |
|
|
|
p2 |
22 |
|
|
2. l2 (t):
W21 (s)- Wд,21 (s)× Wp1 |
(s)× W11 (s) = 0 Þ Wд,21 |
(s) = |
|
W21 (s) |
|
Wp1 |
(s)× W11 (s) |
||||
|
|
|
Если точно соблюдать условия инвариантности, то система получится полностью автономной. Структура может быть (см. п. 9.2.):
а) П-звено б) РД-звено
ПРИМЕР: испаритель.
Требуется регулировать Р и Н. РУ – регулятор уровня.
РД – регулятор давления.
← Двухмерная АСР несвязанного регулирования.
Теория автоматического управления (лекции) п.п. all.doc |
48 |
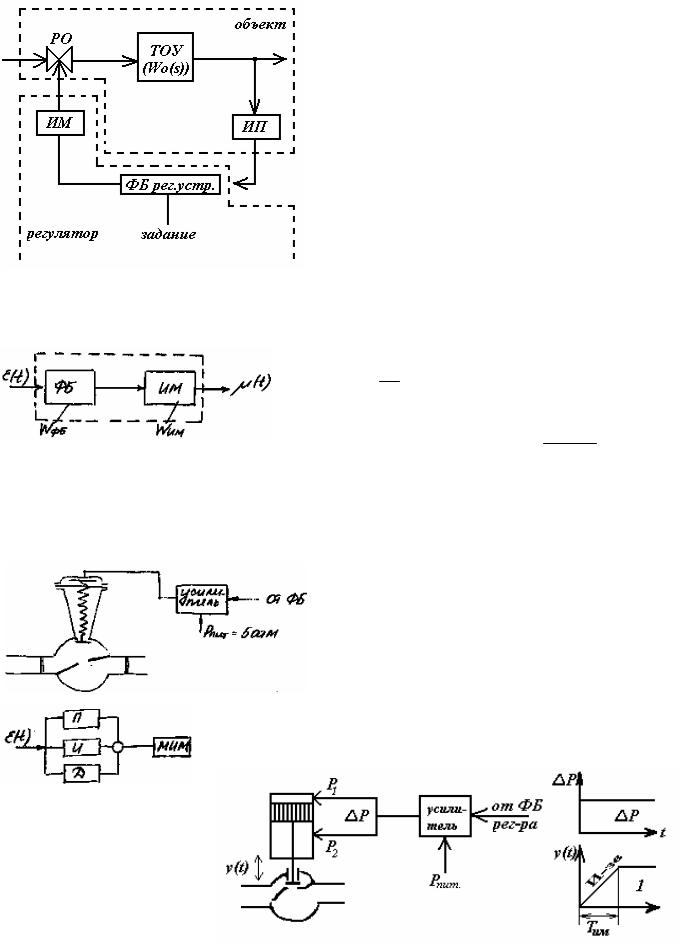
10. Технические средства автоматизации.
10.1. Техническая структура одноконтурной АСР.
РО – регулирующий орган ИМ – исполнительный механизм
ИП – измерительный преобразователь ФБ рег.устр. – функциональный блок регулирующего устройства ФБ – устройство, реализующее алгоритм регулирования
РО - ТОУ - ИП ® Wo (s)- объект ФБ - ИМ ® Wр (s)- регулятор
10.2. Формирование алгоритма и структуры регулятора.
При формировании структуры и алгоритма регулятора следует учитывать тип исполнительного механизма.
}П }И }Д
Wp (s) = kp + ksи + k д × s
1442443
Wp (s) = WФБ (s)× WИМ (s)Þ WФБ (s) = Wp (s())
WИМ s
Типы исполнительных механизмов (по виду используемой энергии):
1.пневматические
2.гидравлические
3.электрические.
1. Пневматические (используется энергия сжатого воздуха).
МИМ – мембранный исполнительный механизм. Очень инерционный механизм (газ сжимаем).
В динамическом отношении МИМ в первом приближении можно считать П-звеном.
Wимп (s) » kим
(kим @ 1)
Тогда WФБ (s) определяется Wp (s).
Пневматические регуляторы применяются в химической и нефтехимической промышленности, а также во взрывоопасных и пожароопасных производствах.
2. Гидравлические
(энергия сжатой жидкости). В качестве жидкости используются сорта машинного масла. Жидкость несжимаема, следовательно, передача практически мгновенная.
Теория автоматического управления (лекции) п.п. all.doc |
49 |
y(t) = ò DPdt = DP × t |
|
|
|
|
|
|||||||||
WИМ |
(s) = |
|
1 |
|
|
; |
|
|
|
|
|
|
|
|
|
ТИМ × s |
+ k д × s |
æ 678 |
}П |
678ö |
|||||||||
|
|
|
|
|
||||||||||
|
|
kp + |
kи |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
Д |
|
Д2 |
|
||
W (s) = |
|
|
s |
|
|
|
|
= Т çk × s + k + k × s2 |
÷ |
|||||
|
|
1 |
|
|
|
|||||||||
ФБ |
|
|
|
|
|
ç |
144424443÷ |
|||||||
|
|
|
|
|
|
|
|
|
ИМ ç |
p |
и |
д |
÷ |
|
|
|
|
|
|
|
|
|
|
|
è |
|
ПДД2 |
|
ø |
|
|
|
|
Tи × s |
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||
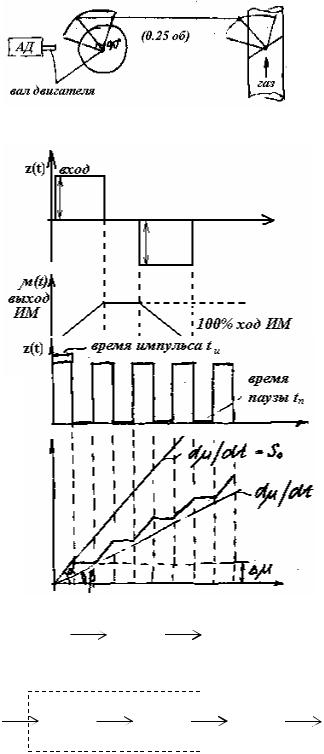
3.Электрические (электрическая энергия).
Воснове ЭИМ лежат асинхронные электрические двигатели с постоянным числом оборотов.
МЭО – механизм электрический однооборотный.
МЭО - |
{ |
/ |
{ |
- |
{ |
4 |
160 |
0.25 |
|||
крутящий |
время |
|
угол |
||
момент |
оборота |
|
поворота |
||
é |
кгс ù |
в сек. |
|
в |
|
ê |
|
ú |
(10;25;63;100;160) |
|
оборотах |
м |
|
||||
ë |
û |
|
|
|
|
Электрические ИМ в динамическом отношении являются нелинейными звеньями.
|
100 |
é%ù |
||
Скорость so = |
|
, ê |
|
ú |
Ти |
|
|||
|
ë |
с û |
||
Управляют ЭИМ с помощью подачи на его вход импульсов.
|
|
|
|
|
|
|
|
|
j = |
|
tи |
|
- скважность – входной сгнал |
|||||||||||
|
|
|
|
|
|
|
|
|
tп + tп |
|
||||||||||||||
|
|
|
|
|
|
|
|
tga = |
Dm |
|
|
ü |
|
tga = so |
|
|||||||||
|
|
|
|
|
|
|
|
tи |
ï |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
|
|
dm |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Dm |
ý Þ |
tgb = |
|
|||||||||
|
|
|
|
|
|
|
|
tgb = |
ï |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
dt |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
tп + tи þ |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
tgb × (tи + tп ) = tga × tп |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
dm |
= so × j |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
s × m(s) = so × j(s) |
|
|
|
|
|
|
|
|
||||||||
|
j |
|
|
μ(t) |
|
|
Wим (s) = |
m(s) |
s |
|
|
100 |
|
|
|
|||||||||
ИМ |
|
|
o |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
= |
|
= |
|
|
|
|
(И-звено) |
|||||||||
|
|
|
|
|
|
|
( ) |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j s |
s |
Тим × s |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
При импульсном управлении ЭИМ становится И-звеном (в первом приближении) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
ШИМ – широтно-импульсный модулятор |
|||||||||||||||
|
|
|
|
|
|
|
|
|
(выход преобразует в импульсы) |
|||||||||||||||
|
ФБ |
|
|
ШИМ |
|
ЭИМ |
|
|||||||||||||||||
|
|
|
|
|
ШИМ + ЭИМ = И − звено |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
678 |
|
} |
678 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
П |
|
Д2 |
|
|||
|
реализуется в |
|
|
|
|
WФБ (s) = kp × s + kи + k д × s2 |
||||||||||||||||||
микропроцессорном контроллере |
|
|
ФБ реализуется в виде ПДД2 – звена. |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
Теория автоматического управления (лекции) п.п. all.doc |
50 |
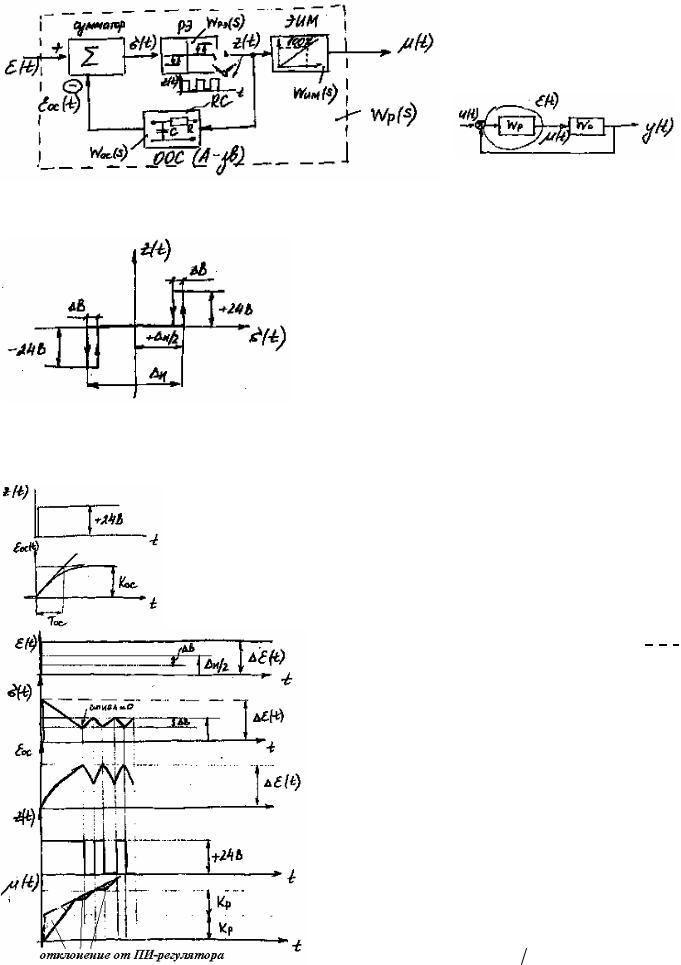
10.3. Релейно-импульсные ПИ-регуляторы с электрическим исполнительным механизмом.
РС-29 – система КОНТУР; Р-17 – система КАСКАД (завод МЗТА)
Структурная схема импульсного ПИ-регулятора с ЭИМ.
e(t) = U(t)- y(t)
Импульсный ПИ-регулятор с ЭИМ реализуется с помощью релейного элемента РЭ, охваченного ООС в виде цепочки R-C (А-звено).
Релейный элемент:
Ü Статистическая характеристика РЭ.
x(t) = e(t)- eoc (t)
Статическая характеристика показывает, какой сигнал будет на выходе РЭ.
Dн - зона нечувствительности |
|
|
|
|
||||||||||||||||||||||||||||||||
В - зона возврата |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Если |
|
x(t)f |
Dн |
|
(или |
|
|
x(t) p - |
Dн |
), то реле сработает |
||||||||||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||
Þ сигнал на выходе РЭ +24В Þ запустится ЭИМ. |
||||||||||||||||||||||||||||||||||||
Если сигнал положительный, то ЭИМ будет крутиться в одну сторону, и наоборот. |
|
|
||||||||||||||||||||||||||||||||||
ООС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На вход поступает сигнал 0, +24В или -24В. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А-звено можно настроить. Настроечные параметры Тос и kос . |
|
|||||||||||||||||||||||||||||||||||
Зона нечувствительности нужна для того, чтобы |
ЭИМ не |
|||||||||||||||||||||||||||||||||||
включался/выключался постоянно (теоретически Dн = 0 ). |
|
|
||||||||||||||||||||||||||||||||||
Зона возврата участвует в формировании импульсов z(t). |
|
|
||||||||||||||||||||||||||||||||||
Подадим на вход сумматора e(t)f |
Dн |
|
|
(ступеньку). |
|
|
|
|
||||||||||||||||||||||||||||
|
|
2 |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
пи (s) |
= k |
|
|
+ |
|
|
kp |
|
|
- идеальный ПИ-регулятор |
|||||||||||||||||||||||||
|
|
|
Ти × s |
|||||||||||||||||||||||||||||||||
|
р |
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
- импульсное приближение ПИ-регулятора. |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
Передаточная функция импульсного регулятора: |
||||||||||||||||||||||||||||||||||||
W |
имп (s) = |
|
|
|
|
Wрэ (s)× Wим (s) |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
+ Wрэ (s)× Wос (s) |
|
|
|
|
||||||||||||||||||||||||||||
|
р |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Wрэ (s) » kрэ ññ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
W |
|
|
(s) |
= |
|
so |
|
; s |
|
= |
|
100% |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
им |
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
Ти |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Woc (s) = |
|
|
|
|
|
|
koc |
|
|
|
|
|
|
- А-звено |
|
|
|
|
||||||||||||||||||
|
Toc |
× s + |
1 |
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Так как Wрэ (s)ññ1 , то пренебрегаем 1 в знаменателе. |
||||||||||||||||||||||||||||||||||||
Тогда: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
имп ( |
) |
|
|
|
|
Toc |
× s + 1 |
|
sо |
|
sо |
|
æ |
1 |
ö |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
ç |
÷ |
||||||||||||||||||||||||||
Wр |
|
s |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
= |
|
|
|
× ç1 + |
|
÷ |
|||||||||
|
|
|
|
|
|
|
k |
oc |
|
|
|
|
|
|
|
s |
k |
|
T |
T × s |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
oc |
oc |
è |
oc |
ø |
||