

Лекции по ТАУ1
.pdfТеория автоматического управления (лекции) п.п. all.doc |
|
|
|
|
|
11 |
|||||||
На практике: |
|
|
|
|
|
|
|
|
х(t) |
|
|||
|
х(t) |
|
|
|
|
|
|
|
|
|
Х |
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tи |
|
t |
|
|
|
|
|
|
|
-Х |
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
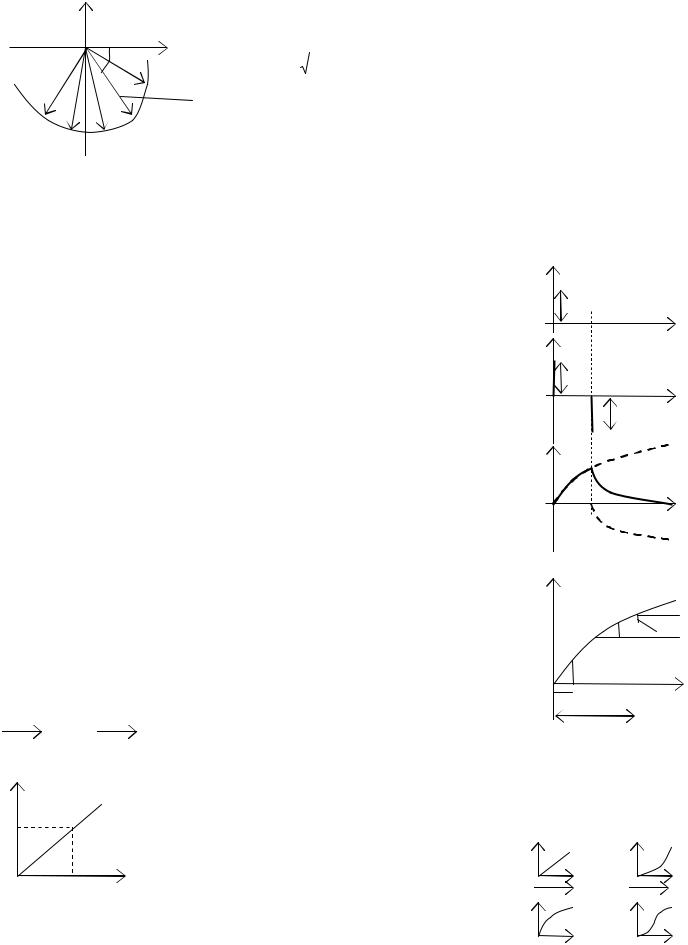
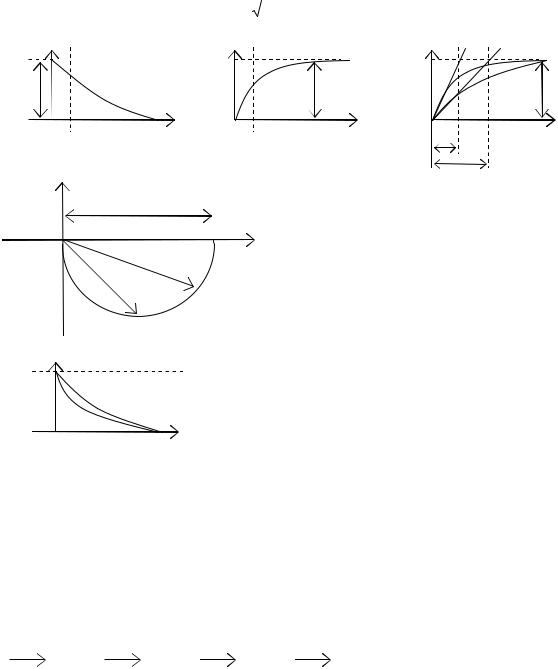
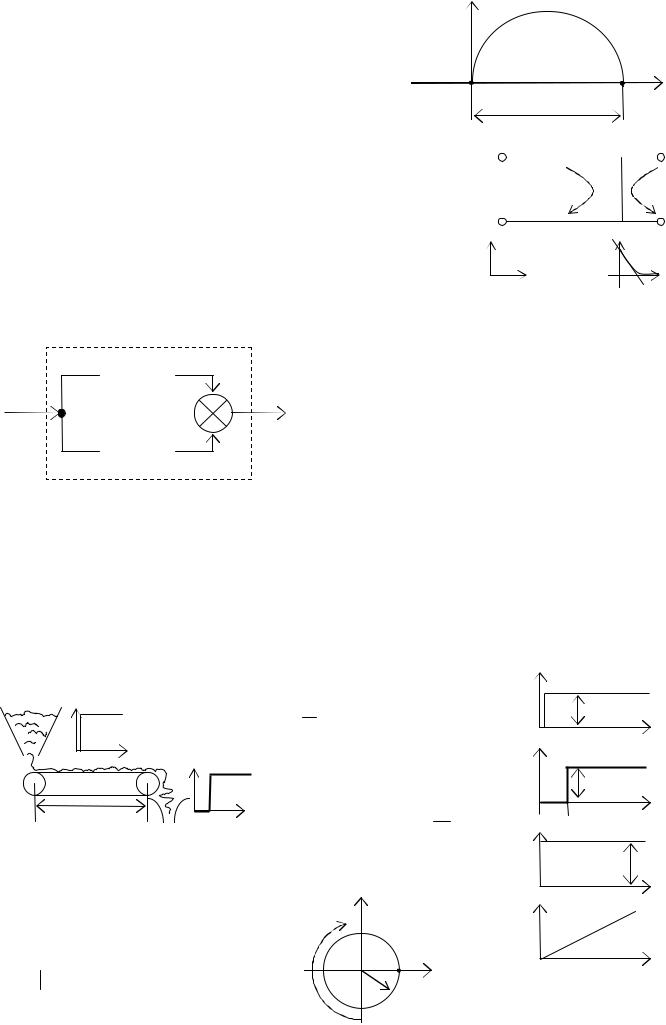
у(t) кривая разгона |
||||||||
Если просуммировать кривые разгона от «+» импульса Х и «-» |
|
||||||||||||
импульса –Х, то получим кривую ω(t) |
|
|
|
|
ω(t)/Х |
t |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h(t) |
|
|
|
|
|
|
|
|
|
|
|
||
h(t) |
ДУ – математическая модель ДС. Решив дифференциальные уравнения |
||||||||||||
|
|
|
|||||||||||
|
|
t |
при х(t) = 1(t), получим переходную характеристику: |
|
|||||||||
|
|
|
h(t) |
|
|
|
æ |
−t ö |
|
|
|
|
|
ω(t) |
|
x(t )=1 |
= k |
ç1 |
- eTa ÷ |
|
|
|
|
|
|||
|
|
|
|
|
|
||||||||
|
|
|
a ç |
÷ |
|
|
|
|
|
||||
|
|
|
|
|
|
|
è |
ø |
|
|
|
|
|
ka/Ta |
Чтобы |
|
получить |
импульсную |
характеристику, |
нужно |
|||||||
|
|
|
продифференцировать h(t). |
|
|
|
|
||||||
t
При x(t) = 2 (например) получим кривую разгона.
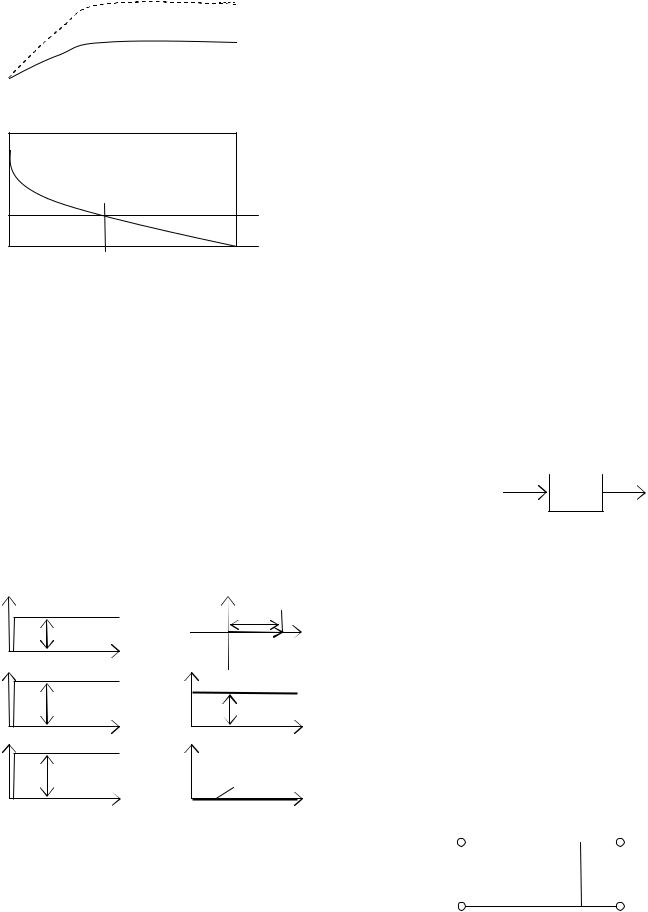
2.6. Частотные характеристики ЛДС.
Частотные характеристики на вход подают какие-то гармонические |
|
|
||||||||||
|
|
|||||||||||
колебания (не ступеньку, как временные). |
|
|
|
|
||||||||
|
x(t) |
|||||||||||
Частота гармонических колебаний: ω = 0 ÷ ∞ (теоретически). |
|
|||||||||||
На практике: wр = w1 ¸ wср |
|
x,y(t) |
||||||||||
wср - частота среза (частота, при которой на выходе нет сигнала). |
Ах |
|||||||||||
|
2 × p |
|
é |
радù |
|
|||||||
wi = |
, |
|
|
|
|
|||||||
|
|
ê |
|
|
ú |
|
|
|
|
|||
Ti |
|
с |
|
|
|
|
|
|||||
|
|
|
ë |
û |
|
|
|
|
||||
Ti - период колебаний wср |
|
|
|
|
||||||||
x(t) = Ax × sin wt |
|
Ti |
||||||||||
На выходе будут колебания с той же частотой и той |
же |
tx |
||||||||||
амплитудой (если система безинерционна), но они могут быть |
ty |
|||||||||||
сдвинуты по фазе (инерционная система). |
|
|||||||||||
Dti = tx |
- ty («-» - отстают, «+» - опережают). |
|
А(ω) |
|||||||||
Время tx и ty надо брать, когда колебания установятся. |
|
|||||||||||
|
А(ωi) |
|||||||||||
Обработка эксперимента. |
|
|||||||||||
|
|
|
|
|||||||||
A(wi ) = |
Ay |
(ωi |
) |
- модуль при ωi (относительная амплитуда) |
|
|
|
|
||||
Ay |
(wi |
) |
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||
A(w)- амплитудно-частотная характеристика (АЧХ) |
|
ωi |
||||||||||
j(wi ) = ±Dti × wi - фазовый сдвиг при ωi (аргумент) |
|
|||||||||||
|
± φ(ω) φ(ωi) |
|||||||||||
j(w)- фазо-частотная характеристика (ФЧХ) |
|
|||||||||||
Комплексная частотная характеристика (КЧХ) |
|
|
|
|
||||||||
W(jw) = A(w)× e± jϕ(ω) - на комплексной плоскости, либо |
в |
|
|
|
||||||||
полярных координатах. |
ωi |
|
ЛДС
y(t)
x(t)
y(t)
Ау t
∆t
АЧХ
ω
ФЧХ
ω
Теория автоматического управления (лекции) п.п. all.doc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|||
|
jIm(ω) |
Другая форма записи: |
|
|
|
|
|
|
|
||||||||||||
|
|
Re(ω) |
( |
jw |
) |
|
|
( |
) |
|
( |
) |
|
|
|
|
|
|
|||
|
|
|
W |
|
= Re w |
+ jIm w |
|
|
|
|
|||||||||||
|
φ(ωi)=-π/4 |
( ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
W(jω) |
= |
|
Re |
2 |
( ) |
+ Im |
2 |
( ) |
|
|
|
|
|||||||||
|
ωi-1 |
A w |
|
|
w |
|
w |
|
|
|
|
||||||||||
|
|
А(ωi) j(w) = arctg |
Im(w) |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
ωi |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
Re(w) |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωi+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
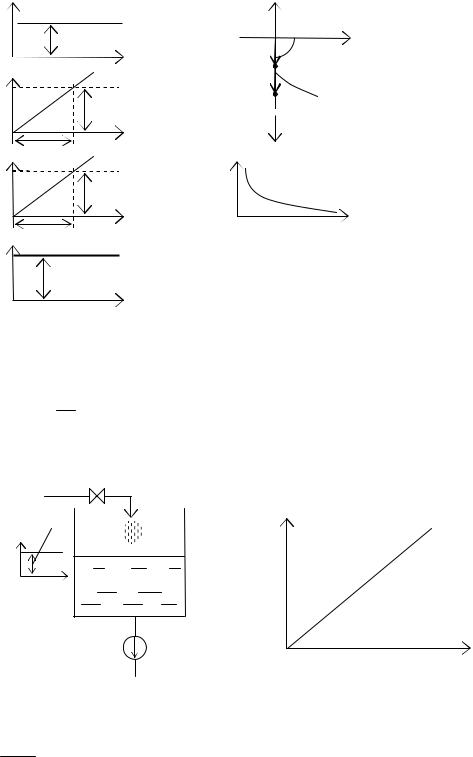
3. Интегральные преобразования в ТАУ. |
|
|
|
|
||||||||||||||
3.1. Интегралы свертки для входного воздействия x(t) произвольной формы. |
|
||||||||||||||||||||
Линейная динамическая система (ЛДС) – система, которая подчиняется x(t) |
x(t)Σ |
|
|
||||||||||||||||||
принципу суперпозиции. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Принцип |
суперпозиции. |
Реакция линейной |
системы на суммарное |
A |
|
|
t |
||||||||||||||
входное воздействие равна сумме реакций на составляющие входного |
|
|
|||||||||||||||||||
|
|
|
|
||||||||||||||||||
воздействия: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(t) |
|
|
|
x1(t) |
|
|
x(t)Σ = x1 |
(t)+ x2 |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
y(t)Σ = y1 |
(t)+ y2 |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
t |
|
Вывод выражения для интеграла свертки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
-A x2(t) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
x(t) = Dx1 (Dt)×1(t - Dt)+ Dx2 (2Dt)×1(t - 2Dt)+ ... + Dxi (iDt)×1(t - iDt) |
|
|
|||||||||||||||||||
Устремим число разбиений на ∆t к ∞ |
|
|
|
|
|
|
|
|
|
|
|
|
y(t) |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y1(t) |
|||||||
y(t) = Dx1 (Dt)× h(t - Dt)+ Dx2 (2Dt)× h(t - 2Dt)+ ... + Dxi (iDt)× h(t - iDt) |
|
|
|||||||||||||||||||
|
|
y(t)Σ |
|
||||||||||||||||||
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
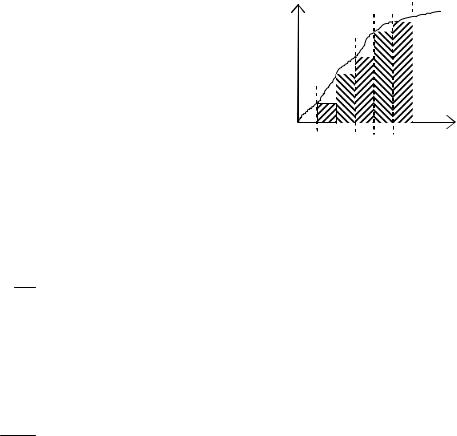
y(t) = åDxi (iDt)× h(t - iDt)× Dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|||
i=1 |
|
|
Dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2(t) |
|
Предельный переход: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
n → ∞, |
t → dτ, i t → τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
y(t) = òt |
x¢(t)× h(t - t)dt |
[1] |
0
Dxi (iDt) ® x¢(t)- производная от х
Dt
[1] – интеграл свертки через переходную характеристику h(t)
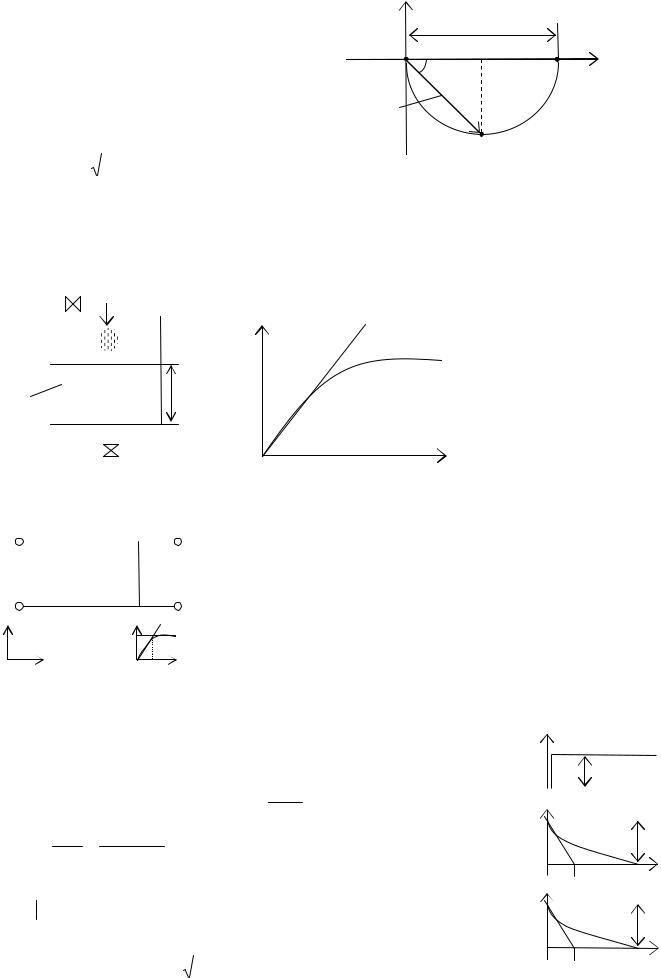
ПРИМЕР. |
x(t) = 1× t , |
||
|
|
||
|
ЛДС |
||
x(t) |
y(t) то есть через 1 с на выходе будет 1, через 2 с – 2. |
||
|
|||
|
|||
x(t)
|
|
|
|
|
|
|
|
∆x2 |
∆xi |
||
|
|
||||
|
|
|
|||
|
|
|
|
|
|
|
∆x1 |
|
|||
|
|
|
|
t |
|
|
|
|
|
||
∆t |
i∆t |
||||
|
|||||
|
|
|
|
|
|
|
h(t) = k |
æ |
|
|
−t |
ö |
x(t) |
ç |
1 |
- eTa ÷ |
|||
|
|
a ç |
|
÷ |
||
|
|
è |
|
ø |
||
1,0 |
|
|
|
|
|
h(t)- переходная характеристика для ЛДС, которую можно описать |
|||||||||||||||||
|
|
|
|
|
|
дифференциальным уравнением 1-го порядка. |
|
|
|
|
|
|
|
||||||||||
1,0 |
|
|
|
|
x′(t) = 1 |
|
|
|
|
|
|
|
|
x(t) |
t |
y(t) |
t |
||||||
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
é |
|
|
|
öù |
или |
|
ЛДС |
|
|
|||||||
t |
æ |
|
|
|
t−τ |
ö |
t |
t − |
t−τ |
|
æ |
|
t |
|
|
|
|||||||
|
|
− |
|
− |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
y(t) = ò1× ka |
ç |
1 |
- e |
|
Ta ÷dt = òkadt - òe |
Ta dt = ka |
êt - Ta |
ç1 - e |
|
Ta ÷ú |
x(t) |
t |
y(t) |
t |
|||||||||
0 |
ç |
|
|
÷ |
0 |
0 |
|
|
ê |
ç |
÷ú |
|
|
|
|
|
|
|
|||||
è |
|
|
ø |
|
|
ë |
è |
øû |
|
h(t) |
|
|
|
|
|
||||||||
Если свойства ЛДС заданы в виде w(t) |
импульсной характеристики: w(t) = |
. |
х(t) заменяем не |
||||||||||||||||||||
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
||
суммой ступенек, а суммой импульсов.
Теория автоматического управления (лекции) п.п. all.doc |
13 |
( ) |
|
t |
( ) |
( |
|
) |
|
[2] |
x(t) |
|
|
|
|
|
||
y t |
= ò x t |
w t - t dt |
|
|
|
|
|
x(t) |
||||||||
|
|
|
|
|
||||||||||||
h(t) |
0 |
æ |
|
− |
t |
ö |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
= k |
ç1 |
- e |
|
Ta ÷ |
|
|
|
|
|
|
|
|||||
|
|
|
a ç |
|
|
÷ |
|
|
|
|
|
|
|
|
||
|
|
|
è |
|
|
ø |
|
|
|
|
|
|
|
t |
||
dh(t) |
= w(t) = |
ka |
× e− |
t |
|
|
|
|
|
|
||||||
Ta |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||||
dt |
|
|
|
|
T |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|||
3.2. Интегральное преобразование Лапласа. Передаточные функции.
Интегральное преобразование Лапласа относится к методу решения задач путем замены переменных:
t → s = −α + jω - время заменяется комплексной переменной s – оператор Лапласа; α, ω – вещественные числа
j = 
 - 1
- 1
Существует прямое и обратное преобразование Лапласа.
Прямое преобразование Лапласа:
∞
F(s) = òf (t)e−stdt = F{f(t)}
0
ПРИМЕР:
Ta dydt(t) + y(t) = ka × x(t) y(t) ® y(s)
y¢(t) ® F{y¢(t)}
x(t) ® F{x(t)}= X(t)
преобразование Лапласа L
|
ìdy(t)ü |
∞ dy(t) |
|
||||||
Lí |
|
|
|
ý |
= ò |
|
|
e−stdt = |
|
|
|
|
|
|
|||||
|
î dt |
|
þ |
0 |
dt |
|
|||
ée−st = U; |
|
|
|
|
|||||
ê |
|
|
|
|
|
|
|
|
|
êdy(t) |
= dV; |
y(t) = V; |
|||||||
ê |
|
|
|
||||||
|
|
|
|||||||
ë dt |
|
|
|
|
|
|
|||
[*]
U × V = òUdV + òVdU ùú
ú
òUdV = U × V - òVdU ú
û
= y(t)× e−st |
|
∞ + |
∞ y(t)× s × e−stdt = -y(0)+ s∞ y(t)× e−stdt = - y(0)+ s × y(s) = s × y(s) |
||||||||
|
|||||||||||
|
|
|
|
|
|
|
0 |
ò |
ò |
123 |
|
|
|
|
|
|
|
|
|
0 |
10 4243 |
0 |
|
|
|
|
|
|
|
|
|
|
|
y(s) |
|
Считается, что y(0) = 0 - нулевые начальные условия. |
|
||||||||||
y′(t) = F{y′(t)}= s × y(s) |
|
|
|||||||||
|
ë*û :® Ta × s × y(s)+ y(s) = ka × x(s) |
|
|||||||||
|
Y(s) |
= W(s) = |
|
ka |
- передаточная функция |
|
|||||
|
X(s) |
|
T × s + 1 |
|
|||||||
|
|
|
|
|
|
|
|
|
a |
|
|
ì |
d |
2 |
y(t) |
ü |
|
|
ü |
|
|
||
Lí |
|
ý |
® s2 Y(s)ï |
|
|
||||||
|
|
|
|
|
|||||||
|
î dy2 |
þ |
|
ï |
при начальных нулевых условиях |
||||||
ì |
|
n |
y(t) |
ü |
|
|
ý |
||||
|
|
|
|
|
|
||||||
Lí |
d |
ý |
® sn Y(s)ïï |
|
|
||||||
|
n |
|
|
||||||||
|
î dy |
þ |
|
|
þ |
|
|
||||
Дифференциальное уравнение в общем виде.
Любую ДС можно представить в виде одного дифференциального уравнения.
Теория автоматического управления (лекции) п.п. all.doc |
14 |
Tn × |
dn y(t) |
+ Tn−1 |
× |
dn−1y(t) |
|
+ ... + T × |
dy(t) |
+ y(t) = íìTm |
× |
dm x(t) |
|
+ ... + T |
× |
dx(t) |
|
+ x(t)ýü × K |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
dt |
dtm |
dt |
||||||||||||||||||||||||||||||||
|
n |
|
|
dtn |
|
|
|
|
n−1 |
|
|
|
dtn−1 |
|
|
|
|
1 |
|
|
|
|
î |
|
m,x |
|
|
1,x |
|
|
þ |
|||||||||||
Т имеет размерность времени. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
Это же уравнение, преобразованное по Лапласу: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
( |
|
m |
|
|
m |
+ ... + T1,x × s + 1 |
) |
|
|
|
|
|
Y(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
K Tm,x × s |
|
|
|
|
|
= W(s) = |
- передаточная функция. |
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
n |
|
n |
+ ... |
|
+ T1 × s + 1 |
|
|
|
( ) |
|
|
|
|
|
|
||||||||||||||||||||||||
|
Tn × s |
|
|
|
|
|
|
|
|
|
X s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Передаточная функция |
|
|
ЛДС W(s) – отношение преобразованных по Лапласу выходной |
|||||||||||||||||||||||||||||||||||||||
переменной Y к входной переменной Х при нулевых начальных условиях. |
|
|||||||||||||||||||||||||||||||||||||||||
Y(s) = X(s)× W(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
«+» - нет интегралов, можно использовать обычное алгебраическое действие. |
|
|||||||||||||||||||||||||||||||||||||||||
Y(s) = L{Y(t)} - прямое преобразование Лапласа |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
Y(t) = L−1{Y(s)} - обратное преобразование Лапласа |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
Y(t) - оригинал, Y(s) - изображение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
−α+ jω,(ω→+∞) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Y(t) |
|
ò Y(s)× e−st ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
−α+ jω,(ω→−∞) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
3.3. ПРИМЕР «Анализ ЛДС с применением интегральных преобразований Лапласа». |
||||||||||||||||||||||||||||||||||||||||
|
x(t) |
|
|
|
|
|
|
|
у1(t) |
|
|
|
|
|
|
у2(t) |
|
|
|
|
у3(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
ДС1 |
|
|
ДС2 |
|
|
|
|
ДС3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Представленная система описывается дифференциальными уравнениями: |
|
|||||||||||||||||||||||||||||||||||||||||
ì |
dy1 (t) |
+ y1 (t) = k1x(t), |
|
|
|
|
[ДС1] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
ïT1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
dy2 |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
ï |
|
|
2 (t) = k 2 y1 (t), |
[ДС2] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
íT2 |
|
|
|
|
|
|
|
+ y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ï |
dy3 |
(t) |
|
|
3 (t) = k 3 y2 (t), |
[ДС3] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
ïT3 |
|
|
|
|
|
|
|
+ y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
î |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Решать эту систему надо относительно y3 (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
Преобразованная по Лапласу система: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
Виды |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(t) |
|
|
|
|
|
у1(t) |
|
|
|
|
у2(t) |
|
|
у3(t) |
|
|||||||||
|
|
|
|
1(t) |
|
|
|
|
|
1·t |
|
|
|
|
|
W1(s) |
|
|
W1(s) |
W1(s) |
|
|
||||||||||||||||||||
|
входящих |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
возмущений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
W1 (s) = T1 k× s1+ 1
W2 (s) = T2 k× s2 + 1
W3 (s) = T3 k× s3 + 1
Y3 (s) = Y2 (s)×W3 (s)
Y2 (s) = Y1 (s)×W2 (s) ÞY3 (s) = X(s)×W1 (s)×W2 (s)×W3 (s) Y1 (s) = X(s)×W1 (s)
Y3 (t) = L−1 {Y3 (s)}
Программа для решения задачи в среде MathCad Prof. RZDLaplace.
при x(t) = 1(t)
x(t)
t
y(t)
t
Теория автоматического управления (лекции) п.п. all.doc |
15 |
k1 := 1 |
|
|
k 2 := 1 |
|
k 3 := 1 |
|
|
|
|
|
|
T1 := 1 |
|
k1 |
T2 := 2 |
k 2 |
T3 := 4 |
|
k 3 |
|
|
А·1(t) |
|
W1 (s):= |
|
W2 (s):= |
W3 |
(s):= |
|
|
|
||||
T1 |
× s + 1 |
T2 × s + 1 |
T3 |
× s |
+ 1 |
|
|
||||
|
|
|
|
|
|
||||||
A := 2
x(t):= A ×1
W(s):= W1 (s)× W2 (s)× W3 (s)
|
laplace,t |
ü |
|
}A |
|
t |
|
|
|
||||
|
|
|
||||
X(s):= x(t) |
ï |
® |
2 |
|
||
|
|
|||||
float,4 |
ýобращенение к функции laplace |
|
- решение, |
|
||
s |
|
|||||
|
123 |
ï |
|
|
|
|
|
точность 4 знакааþ |
|
|
|
|
|
|
|
|
|
|
||
которое выдаст компьютер.
inlaplace,s → решение системы дифференциальных уравнений |
|
Y(t):= X(s)× W(s)float,4 |
- 0,6667 × exp(- 1× t)+ 4 × exp(- 0.5 × t)- 5.330 × exp(- 0.25 × |
t → 0 ÷ ∞
Если строить график, необходимо задать определенный промежуток t.
|
|
|
Интегральные преобразования Фурье. |
x(t) |
|
у(t) |
Преобразование Лапласа s = −α + jω |
W(s) |
Физического смысла такое преобразование не имеет. Фурье ввел s = jω , имеет физический смысл.
2
t)+ 2
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Y(jw) = ò Y(t)e− jωtdt = F{Y(t)}- прямое преобразование Фурье. |
x(jω) |
|
у(jω) |
||||||||||||||||||||||||
W(jω) |
|||||||||||||||||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
W(jw)- комплексно-частотная характеристика (КЧХ) |
|
|
|
||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||
W(jw) = W(s) |
|
s=jω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
ПРИМЕР: |
|
|
|
|
|
|
|
|
|
dy(t) |
|
|
|
|
|
|
|
|
|
|
|
||||||
Апериодическое звено: T × |
|
+ y(t) = k |
a |
× x(t) |
|
|
|
||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
dt |
|
|
|
|
|
|
|
|
|||||
|
|
Y(s) |
|
|
|
|
|
|
ka |
|
|
|
|
|
|
|
|
|
|
||||||||
W(s) = |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
( ) |
|
|
|
Ta |
× s + 1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
X s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
W(jw) |
|
|
|
Y(jw) |
|
ka |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
= |
|
|
= |
|
|
|
® КЧХ |
|
|
|
|
|
|
|
|
|
|||||||||||
|
X(jw) |
|
Ta × jw + 1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
W(jw) |
|
|
|
|
|
ka (- Ta × jw + 1) |
ka |
|
|
- j |
ka × Ta × w |
|
|
|
|||||||||||||
= |
|
|
= |
|
|
|
|
|
|
||||||||||||||||||
|
(T × jw + 1)(- T × jw + 1) |
T2w2 + 1 |
T2w2 + 1 |
|
|
|
|||||||||||||||||||||
|
|
|
|
a |
|
|
|
|
|
|
|
a |
|
|
|
14243 |
14243 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
a |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Re(ω) |
|
|
|
Im(ω) |
|
|
|
||
W(jw) = A(w)× ejϕ(ω)
A(w) = Re2 (w)- Im2 (w)
j(w) = arctg Re((w))
Im w ka

 Ta2w2 + 1
Ta2w2 + 1
j(w) = -arctg(Ta w)
W(jw) = |
|
ka |
|
|
|
|
|
|
|
T2w2 |
+ 1 |
|
||
|
|
|
||
|
|
a |
|
|
-модуль (или АЧХ)
-ФЧХ
× exp[- jarctg(Ta w)]
АЧХ строятся при ω = 0 ÷ ∞
jIm(ω)
ka
Re(ω)
ω = 0
ka ka
2 |
2 |
 wi = 1
wi = 1
Ta
Теория автоматического управления (лекции) п.п. all.doc |
16 |
||||||
|
ìRe(w) = k |
|
|
|
|
||
w = 0 |
îíIm(w) = 0a |
|
|
|
|
||
|
ìRe(w) = 0 |
|
|
|
|
||
w = ¥ |
ï |
|
|
p |
|
||
í |
|
|
|
||||
|
ï- arctg(Ta w) = - |
2 |
|
|
|
||
|
î |
1 |
|
k |
|
|
|
При w = |
, j(w) = -45 , |
А(w) = |
a |
|
|||
|
|
|
|
||||
|
|
Ta |
2 |
|
|||
-А(ω)
АЧХ
ka
ωi ω
jIm(ω)
kа1= kа2
 ωi
ωi
-А(ω) АЧХ
1
2
ω
-φ(ω) |
|
h(t) |
1 |
2 |
|
|
|
- p |
|
||
|
|
|
|
kа1= kа2 |
|
|
|
2 |
|
|
|
|
ωi |
ω |
|
Та1 |
t |
|
|
|
|
Та2 |
|
|
|
|
2 апериодических звена |
||
|
Re(ω) |
- При одних и тех же частотах амплитуды различаются/ |
|||
 ωi
ωi
- Для безинерционных систем диапазон частот бесконечен.
Построение переходных характеристик с применением обратного преобразования Фурье.
Входное воздействие: x(t) = 1(t)
|
|
2 |
ωсрез |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h(t) = |
ò |
Re{W(jw)}× Sinwt × dw |
|
|
|
|
|
||||||||||
p |
|
|
|
|
|
||||||||||||
|
|
0 |
|
|
w |
|
|
|
|
|
|
|
|
|
|
||
Необходимо знать КЧХ W(jw) |
|
|
|
|
|
|
|
||||||||||
ПРИМЕР (см. ранее). |
|
|
|
|
|
|
|
|
|
||||||||
x(t) |
|
|
|
|
|
|
|
|
|
|
|
у(t) |
|
|
|||
|
W1(s) |
|
|
|
W1(s) |
|
|
|
W1(s) |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 3 := |
|
|
|
k1 := |
|
|
|
|
|
|
k 2 := |
|
|
|
|
|
|
||||
T1 := |
|
|
|
|
|
|
T2 := |
|
|
|
|
T3 := |
|
|
|||
W1 (jw):= |
|
|
k1 |
W2 |
(jw):= |
|
|
k 2 |
|
W3 (jw):= |
|
k 3 |
|||||
T1 |
× jw + 1 |
T2 |
× jw + 1 |
|
T3 |
× jw + 1 |
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
W(jw):= W1 (jw)× W2 (jw)× W3 (jw)
Wcp := 0.2
Теория автоматического управления (лекции) п.п. all.doc |
17 |
||||||
h(t):= |
2 |
ωср |
Re{W(jw)} |
|
|
||
ò |
× Sinwt × dw |
|
|||||
p |
w |
|
|
||||
|
|
0 |
|
|
|||
3 |
|
|
|
|
|
Если помножить на 2. |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
||
h(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 t 30
Re{W(jω)}
Re{W(jω)}
 (0.01÷0.03)Re(0) - к выбору частоты среза
(0.01÷0.03)Re(0) - к выбору частоты среза
ωср ω
4. Элементарные динамические звенья.
4.1. Общие сведения.
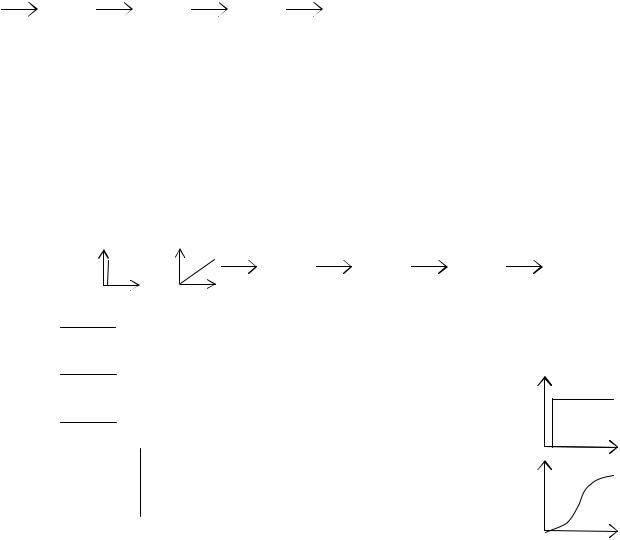
Элементарное динамическое звено (ЭДЗ) – ЛДС, описываемая дифференциальными уравнениями не выше 1-ого порядка.
Дифференциальное уравнение в общем виде: T |
dy(t) |
+ y(t) = k × T |
dx(t) |
+ k × x(t) |
|
|
||
dt |
|
dt |
|
|
|
|||
1,y |
1,x |
|
|
|
||||
Свойства ЭДЗ: |
|
|
|
|
|
x(t) |
|
y(t) |
1. детектируемость – означает, что ЭДЗ однонаправленные – сигнал |
|
|||||||
|
||||||||
проходит со входа на выход, а не наоборот. |
|
|
|
|
|
|
ЭДЗ |
|
2.автономность – свойства одного звена не влияют на свойства другого (свойства звена определяются постоянными Т1,х; Т1,у; k).
|
|
|
|
|
|
|
|
|
4.2. Пропорциональное звено (П-звено). |
|
|
|
|
|
||||||||||||
|
x(t) |
|
|
|
|
|
|
|
jIm(ω) |
|
k |
y(t) = k × x(t) |
|
|
|
|
|
|||||||||
|
|
|
x(t) |
|
|
|
|
|
|
|
( ) |
|
y(t) |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
t |
|
|
|
|
|
|
h t |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Re(ω) |
x(t) |
|
|
|
|
|
|
|
|
||||||
|
y(t) |
|
|
|
|
|
|
A(ω) |
|
|
|
|
|
|
y(s) |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
k·x(t) |
|
|
|
|
k |
W(s) = x(s) |
= k - передаточная функция |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
W(jw) = k - КЧХ, |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
t |
|
|
|
|
|
ω |
будет представлена |
|||||||||||||
|
h(t) |
|
|
|
|
|
|
φ(ω) |
|
|
|
для |
любых |
частот КЧХ |
||||||||||||
|
|
k·1(t) |
|
|
φ(ω) = 0 |
вектором. |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
t |
|
|
|
A(w) = k |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
ω |
j(w) = 0 |
|
|
|
|
|
|
|
|
||||||
ПРИМЕР: - пассивный четырехполюсник. |
|
|
|
|
|
|
|
|
|
R1 |
||||||||||||||||
|
Uвх |
= |
Uвых |
|
Þ U |
вых |
= |
|
R2 |
× U |
вх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
R1 + R2 |
R2 |
R1 + R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
{ |
|
|
{ |
|
|
|
|
|
|
|
Uвх |
|
R2 |
|
Uвых |
|||||||||
|
|
|
|
|
y(t ) |
|
14243 |
x(t ) |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Разностное уравнение: y j+1 |
|
= k × xj |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
- применяется при имитационном моделировании
Теория автоматического управления (лекции) п.п. all.doc |
18 |
4.3. Интегрирующее звено (И-звено).
T |
dy(t) |
= x(t) |
|
|
||||
dt |
|
|
|
|||||
и |
|
|
|
|
|
|||
Tи - постоянная времени (интегрирования) |
||||||||
t |
|
|
1 |
t |
1 |
|
||
òdy(t) = |
× x(t)× òt Þ y(t) = |
× x(t)× t |
||||||
|
Tи |
|
||||||
0 |
|
|
|
0 |
Tи |
|||
Кривые разгона y(t), переходные характеристики h(t)
x(t) |
|
|
|
jIm(ω) |
ω→∞ Re(ω) |
|||
|
x(t)=А·1(t) |
КЧХ |
|
|||||
|
|
j(w)= - |
p |
|
||||
|
|
t |
ωi |
|
||||
|
|
|
|
|
||||
y(t) |
|
|
|
|
ωi-1 |
2 |
|
|
|
|
|
|
W(jω) |
||||
|
y(t)=x(t) |
|
|
|
||||
|
|
|
|
|
|
|
||
|
|
t |
|
|
|
ω→0 |
||
h(t) |
Tи |
|
A(ω) |
|
|
|
|
|
1(t) |
|
|
A(ω) AЧХ |
|||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
ω |
||
φ(ω) |
Tи |
|
|
|
|
|
|
|
ϕ(ω)= − |
π ФЧХ |
|
|
|
|
|||
|
|
|
|
|
||||
|
|
2 ω |
|
|
|
|
|
|
Разностное уравнение: T |
y j+1 − y j |
= x |
|
|
|
|
||
|
j |
|
|
|
||||
|
|
и |
Dt |
|
|
|
||
|
|
|
|
|
|
|
||
t - шаг (выбирается): Dt = t j+1 - t j
y j+1 = y j + Dt × xj
Tи
Требуется задание начальных условий: у0 ¬ 0, х0 ¬ 0
Передаточная функция: |
|
|
|||||||||||||
Tи × s × y(s) = x(s)Þ |
|
|
|
||||||||||||
|
y(s) |
1 |
|
|
|
|
|
|
|
|
|||||
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(s) |
T |
|
× s |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
КЧХ: |
|
|
|
|
1 |
|
|
1 |
|
||||||
|
W(jw) |
|
s= jω = |
|
|
= -j |
|
||||||||
|
|
|
|||||||||||||
|
|
T × jw |
|
T × w |
|
||||||||||
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
1и23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Im(ω);{Re(ω)=0} |
||
|
W(jw) = |
|
1 |
|
× e− j |
π |
|
|
|||||||
|
|
|
2 |
|
|
||||||||||
|
|
T × jw |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
||
Если подавать на вход гармонические колебания, то на выходе сигнал будет
отставать на p2 .
wi f wi−1
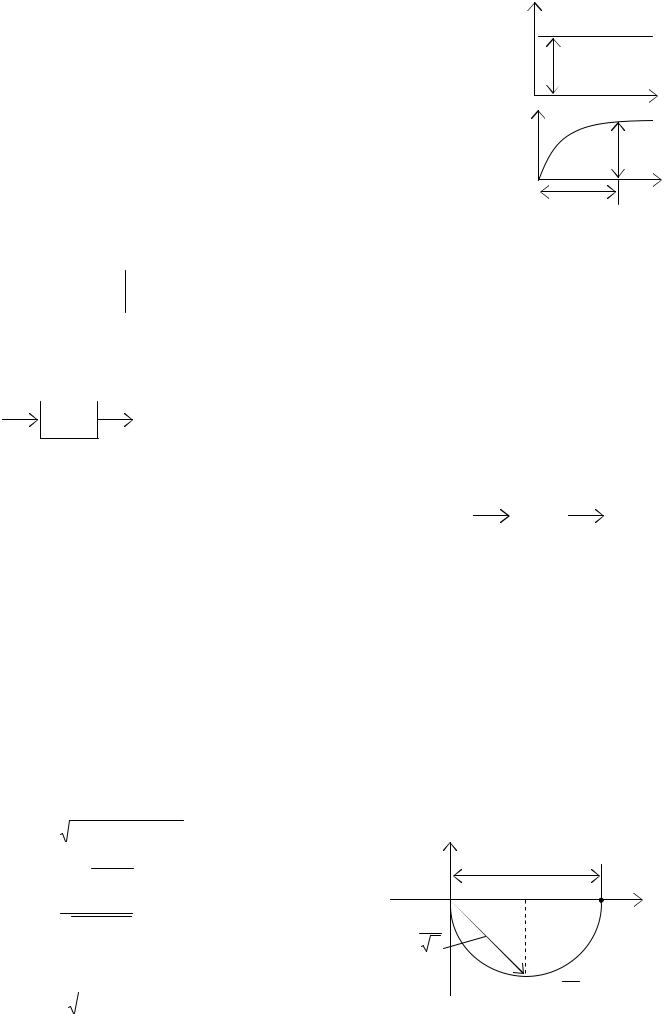
ПРИМЕР: емкость постоянного сечения, в которую наливают воду с постоянным расходом.
Gприток |
H |
|
t |
Gсток=const |
|
4.4. Апериодическое звено (А-звено).
Tа dydt(t) + y(t) = kа × x(t)
Апериодическое, так как решение – экспонента, нет колебаний.
Теория автоматического управления (лекции) п.п. all.doc
y(t) = x(t)× k |
|
æ |
|
- |
t |
ö |
|
|
||||||||||
а |
ç1 |
- e |
Tа ÷ |
|||||||||||||||
|
|
|
|
|
|
|
ç |
|
|
|
÷ |
|
|
|||||
|
|
|
|
|
|
|
|
è |
|
|
|
ø |
|
|
||||
h(t) = k |
æ |
|
|
|
|
- |
t |
|
ö |
|
|
|
|
|
||||
ç |
1 |
- e |
Tа ÷ |
|
|
|
|
|
||||||||||
|
|
|
а ç |
|
|
|
|
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|
|
W(s) = |
|
y(t) |
= |
|
|
|
|
kа |
|
|
|
|
|
|||||
|
( |
|
) |
|
Ta |
|
× s + 1 |
|||||||||||
|
|
|
x t |
|
|
|
|
|
||||||||||
W(jw) |
|
s |
= jw |
|
= |
|
|
|
|
|
ka |
|
|
|
|
× e- jarctg(Taw) |
||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
T |
2w2 |
+ 1 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
||
19
jIm(ω) |
|
ka |
|
|
Re(ω) |
ω = ∞ φ(ωi) |
ω = 0 |
А(ωi) |
|
ωi |
|
Разностные уравнения (для имитационного моделирования, числовые решения)
T |
y j+1 − y j |
|
+ y |
|
|
= k |
|
× x |
|
Þ y |
|
= ... |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
j |
a |
j |
j+1 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
а |
Dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
ПРИМЕРЫ: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
1) При - H Þ Gст - и наоборот. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Gприток |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
И-звено |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
А-звено |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gсток=f(H) |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dUвых |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I = C × |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Uвх |
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
Uвых |
I = |
Uвх - Uвых |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R × C × |
dUвых |
|
+ U |
|
= U , |
k = 1 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
{ |
|
|
|
{ { |
a |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
вых |
вх |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ta |
|
|
|
y(t) |
x(t ) |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Та=R·C
|
|
|
|
|
4.5. Реальное дифференцирующее звено |
||
T |
dy(t) |
+ y(t) = k |
|
× T |
dx(t) |
||
dt |
|
|
dt |
|
|||
д |
|
д |
д |
||||
(идеальное дифференцирующее звено dydt(t) = 0 )
W(s)= Y((s)) = k д × Тд × s
X s Tд × s + 1
y(t) = L-1 {x(t)× W(s)}
W(s)s®¥ = k д
t®0
W(jw) |
|
|
= |
k д × Тд × jw |
= |
k |
д × Тд × w |
|
× e- jarctg(Тд ×w) |
|
|
|
|||||||||
|
s= jw |
Тд × jw + 1 |
|
|
|
|||||
|
|
|
|
|
T2w2 |
+ 1 |
|
|
||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
д |
|
|
|
(РД-звено).
x(t)
x(t)=А·1(t)  t
t
y(t) А·kд
А·kд
t
Tд
h(t) kд ·1(t)
kд ·1(t)
t
Tд
Теория автоматического управления (лекции) п.п. all.doc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|||||||||||||||||||||||||
Выходные колебания в такой системе опережают |
|
jIm(ω) |
|
|
|
|
|
КЧХ |
|
|
||||||||||||||||||||||||||||||||||||||||
входные. |
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
w = 0; |
|
|
|
|
|
( ) |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Re(ω) |
|||||||||
|
|
|
|
|
j w |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
w = ¥; |
|
|
|
|
|
j(w) = 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω = 0 |
|
|
|
|
|
|
|
|
ω = ∞ |
|||||||||||||||||
ПРИМЕР: РД-звено – пассивный четырехполюсник. |
|
|
|
|
|
|
|
|
|
kд |
|
|
||||||||||||||||||||||||||||||||||||||
I = C |
|
dUc |
= C |
d(Uвх - I × R) |
= |
C |
dUвх |
- C × R |
dI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|||||||||||||||||||||||
|
|
dt |
|
|
|
|
dt |
|
|
|
|
dt |
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
C × R |
dI |
+ |
I = |
C × R dUвх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uвх |
|
|
|
|
|
I R |
|
|
|
Uвых |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
dt |
|
R |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
k д = |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
) |
|
|
|
|
( ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
R |
; Tд = C × R ; I = y t ; Uвх |
® x t |
|
|
|
|
|
|
Uвх |
|
|
|
|
|
|
|
I |
|
|
|||||||||||||||||||||||||||||||
|
dy(t) |
|
|
|
|
|
|
|
|
dx(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
+ y(t) = k д × Tд × |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1(t) |
|
|
|
|
|
1/R |
|
|
|
|
|||||||||||||||||||||||
Tд dt |
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
R·C |
|
t |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Если R → 0 , то получим идеальное дифференцирующее звено; k д × Tд = const . |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
Разностное уравнение. |
|
|
|
|
|
|
|
|
|
|
П-звено: k д ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
x(t) |
|
|
|
|
|
|
|
|
|
П-звено |
|
|
|
|
|
+ |
y(t) |
А-звено: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
× s + 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обычно РД-звено представляют так: |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
у2 |
|
|
- |
|
|
|
W |
= k |
|
- |
k д |
= |
k д × Tд × s |
- передаточная |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
А-звено |
|
|
|
|
|
|
д |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РД-звено |
|
|
рд |
|
|
Tд × s + 1 |
|
Tд × s + 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
функция. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ìy1j+1 = k д × xj |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
ï |
|
|
|
|
|
|
|
æ |
|
Dt |
ö |
|
|
|
|
Dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
íy2j+1 |
= |
ç |
1 - T |
÷ |
× y j + k д × T |
× x |
- разностные уравнения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
ç |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
ï |
|
|
|
|
|
|
|
è |
|
|
д |
ø |
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
= y1j+1 + y2j+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
îy j+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
4.6. Запаздывающее звено (З-звено). |
|||
|
|
(Звено транспортного запаздывая). |
|||
x(t) |
|
|
ПРИМЕР: |
|
|
|
|
t = L , V – скорость. |
|
|
|
1(t) |
|
|
|
|
|
t |
y(t) |
V |
|
|
|
|
|
y(t) = x(t)- t |
|
|
|
транспортер |
|
|
- уравнение З-звена. |
|
|
|
1(t) t |
Разностное уравнение: |
|
||
|
|
t ö |
|||
L |
|
τ |
æ |
- |
|
|
y j+1 ¬ ifçt j p t,0,xj |
÷ |
|||
|
|
|
è |
|
Dt ø |
Если t j p t , то y j+1 = 0 , иначе y j+1 = xj - |
|
t |
||
|
|
|||
|
Dt |
|
||
W(jw) = 1× e- jwt - КЧХ З-звена |
|
|
jIm(ω) |
|
t - временной сдвиг, w - частота. |
|
|
||
ω→∞ |
||||
Фазовый сдвиг = w × t |
||||
|
|
|
||
Знак «-» означает запаздывание. |
|
|
|
|
W(s)jw®s = e-s×t -передаточная функция.
ω = 0 Re(ω)
А(ω)=1
x(t)
y(t)
А(ω)
-φ(ω)
x(t)
t
y(t) = x(t)
t
τ
1,0
ω
ω