

MATLAB для дискретных САУ
.pdf
|
|
|
|
|
21 |
|
|
& |
ϕω= |
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
& y |
1 |
|
y |
K |
δ , + ω ω− = |
|
|
|
Ts |
|
|
|
|||
|
|
|
|
Ts |
|
||
гд е ϕ – угол |
ры скани я(угол отклонени яотзад анного курса), ω y – углов ая |
||||||
скорость в ращ ени я в округ в ерти кальной оси , |
δ – угол пов орота в ерти кального |
||||||
руля относи тельно |
полож ени я рав нов еси я, |
Ts – постоянная в ремени , K – |
|||||
постоянны й коэ ффи ци ент, и мею щ и й размерность сек-1. Перед аточнаяфункци я отугла пов орота рулякуглу ры скани язапи ш етсяв в и д е
F(s) = |
K |
|
|
||
|
. |
|
|
||
|
|
|
|||
|
|
( ss+T )1 |
|
|
|
|
|
s |
|
|
|
В |
лабораторной работебуд ем и сслед ов ать мод ель суд на-контей неров оза при |
||||
T |
= |
2, 18 |
|
K = 0694 0,-1 |
. |
|
s |
сек , |
сек |
||
При в од (рулев аямаш и на) при бли ж енно мод ели руетсязв еном перв ого поряд ка
G(s) = |
KR |
, |
|
TR s +1 |
|
||
спараметрами |
|
|
|
TR = 2 сек , |
|
KR = 1. |
|
Д ля и змерени я угла |
ры скани я и спользуется ги рокомпас, математи ческая |
||
мод ель которого запи сы в аетсяв в и д еапери од и ческого зв ена перв ого поряд ка с перед аточной функци ей
G(s) = |
|
Koc |
, |
|
|
|
|
|
|
|
|
|||
T |
|
s +1 |
|
|
|
|
|
|
|
|
|
|||
|
|
oc |
|
|
|
|
|
|
|
|
|
|
|
|
гд ед ляд анной си стемы |
|
|
|
|
|
|
|
|||||||
Toc = 6 сек , |
Koc = 1 . |
|
|
|
||||||||||
Структурная |
|
|
|
схема |
си стемы |
стаби ли заци и : |
||||||||
ϕ 0 |
|
|
|
регулятор |
|
при в од |
объект |
|
||||||
+ |
|
ε |
|
|
u |
|
|
δ |
|
|
ϕ |
|||
|
C(s) |
|
|
H(s |
F(s) |
|
||||||||
|
|
|
|
|
||||||||||
|
– |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
G(s
и змери тельная
си стема Н а суд неустанов ленпропорци онально-и нтегрально-д и фференци альны й (ПИ Д )
непреры в ны й регулятор, которы й опи сы в аетсяперед аточной функци ей
æ |
1 |
|
|
TDs |
ö |
|
ç |
|
|
÷ |
|||
|
(=)+ |
+ |
||||
KC 1s |
T |
÷ |
||||
c ç |
I |
s |
T s +1 |
|||
è |
|
|
|
V |
ø |
|
спараметрами |
|
|
|
|
|
|
K |
c |
= 08, |
, |
T |
I |
= 1000 |
сек , |
T |
D |
= T |
s |
= |
2, 18 |
T |
= 1 |
сек . |
|
|
|
|
|
|
|
сек , |
V |
|
22
Т ребуетсяпострои ть мод ель непреры в ной си стемы в сред еMATLAB/SIMULINK, построи ть переход ны й процессв непреры в ной си стемепри и зменени и курса на
10 град усов , |
в ы полни ть |
переоборуд ов ани е |
непреры в ного регулятора с |
||||||||||
помощ ью |
преобразов ани я |
Т асти на |
s = |
2 |
× |
z -1 |
при |
в ы боре |
и нтерв ала |
||||
T |
z +1 |
||||||||||||
|
|
T = 1 сек, |
|
|
|
|
|
|
|
||||
кв антов ани я |
построи ть |
мод ель |
ци фров ой |
си стемы |
в сред е |
||||||||
MATLAB/SIMULINK, срав ни ть переход ны епроцессы |
в непреры в ной и ци фров ой |
||||||||||||
си стемах при и зменени и |
курса на 10 град усов , а такж е пов тори ть процед уру |
||||||||||||
д ляи нтерв ала кв антов ани яT = 5 сек, объясни ть э ффекты , наблю д аю щ и есяпри |
|||||||||||||
ув ели чени и |
и нтерв ала кв антов ани я, |
и д ля послед него в ари анта рассчи тать |
|||||||||||
перерегули ров ани еи времяпереход ного процесса. |
|
|
|
||||||||||
П о дго т о вк а исхо дныхда нных
Запусти теси стему MATLAB.
Вв ед и тед анны ед ляперед аточной функци и F(s) :
>>Ts = 18.2;
>>K = 0.0694;
>>F = tf(K, [Ts 1 0])
>>[nF,dF] = tfdata(F, 'v')
Послед няя строчка |
означает, что чи сли тель и знаменатель скалярной |
перед аточной функци и |
F (s) буд утзапи саны в поли номы nF и dF. |
Зад ан ие. А налоги чно опи ш и те в се остальны е перед аточны е функци и (э ти операци и мож но в ы полни ть и наче, напи сав скри птна язы кеси стемы MATLAB в в и д ефай ла).
Мо дел ьнепрерывно й сист емы
Запусти тепакетSIMULINK, набрав в команд ном окнеси стемы MATLAB
>> simulnik |
|
|
|
|
|
|
|
|
|
|
|
Созд ай тенов ую мод ель (File –New –New model). |
|
|
|
||||||||
В ы бери те группу э лементов Continuous в |
окне Simulink Library Browser и |
||||||||||
перетащ и те в |
окно |
нов ой |
мод ели |
э лемент Transfer |
Fcn |
(перед аточная |
|||||
функци я). |
|
|
|
|
|
|
|
|
|
в в ед и те nF в поле |
|
Сд елай те д в ой ной |
щ елчок мы ш ью |
по э тому |
блоку и |
||||||||
Numerator |
и |
dF |
в |
поле Denominator. |
Э то |
означает, что |
чи сли тель и |
||||
знаменатель перед аточной функци и |
F(s) д олж ны |
бы ть зад аны |
в команд ном |
||||||||
окнеси стемы MATLAB какполи номы си менами nF и dF. |
|
|
|||||||||
Щ елкни те на э том блоке правой кнопкой мы ш и и |
в ы бери те пункт Format – |
||||||||||
Flip name |
и з |
контекстного |
меню . |
При |
э том |
назв ани е блока д олж но |
|||||
перемести тьсяв в ерх.
Щ елкни тена блокелев ой кнопкой мы ш и и и змени теназв ани еблока на Ship.
А налоги чно д обав ьте блоки , соотв етств ую щ и е рулев ому устрой ств у, и змери тельной си стемеи регулятору.
23
Ч тобы и змени ть направ лени епрохож д ени яси гнала через блокобратной св язи , д в аж д ы в ы бери тепунктFormat –Rotate block и з контекстного меню .
Д лятого чтобы смод ели ров ать ступенчаты й в ход ной си гнал, перетащ и теблок
Sources –Step и з окна Simulink Library Browser в окно мод ели .
Сд елай тед в ой ной щ елчокмы ш ью по э тому блоку и в в ед и те0 в полеStep time и 10*pi/180 в полеFinal value (и зменени екурса на 10 град усов ).
Д лясозд ани ясумми рую щ его э лемента перетащ и теблокMath operation –Sum
и з окна Simulink Library Browser в окно мод ели .
Сд елай тед в ой ной |
щ елчокмы ш ью по э тому блоку и в в ед и те|+- в полеList of |
signs (в торой в ход |
– отри цательнаяобратнаясв язь). |
Д лятого чтобы на в ы ход еполучи ть значени яугла ры скани яи угла переклад ки
руля в |
град усах, д обав ьте в |
мод ель д в а блока-уси ли теля (Math operations - |
|
Gain). |
Д ля каж д ого и з |
ни х установ и те (щ елкнув |
д в аж д ы по блоку) |
коэ ффи ци ентуси лени я180/pi. |
|
||
Д ля просмотра графи ков и зменени я угла ры скани я и |
угла переклад ки руля |
||
д обав ьтев мод ель д в а блока-осци ллографа (Sinks –Scope).
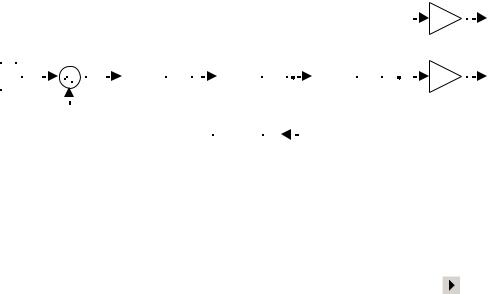
Соед и ни те нуж ны е в ход ы и в ы ход ы блоков . Д ля э того над о наж ать лев ую кнопку мы ш и на в ы ход еэ лемента-и сточни ка си гнала и в ести мы ш ь кнуж ному
в ход у |
э лемента-при емни ка, |
гд е отпусти ть кнопку мы ш и . Д ля того чтобы |
|||||||||||||||||||||||||||||||
сд елать разв и лку, напри мер, |
при созд ани и ли ни и обратной |
св язи , над о наж ать |
|||||||||||||||||||||||||||||||
на прав ую кнопку мы ш и в нуж ном местели ни и и , неотпуская ее, |
протянуть |
||||||||||||||||||||||||||||||||
ли ни ю |
к вход у нуж ного блока. В результате д олж на |
получи ться схема: |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-K- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
PID-controller |
|
|
Rudder |
|
|
|
|
|
Ship |
|
|
Delta |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nC(s) |
|
|
|
nH(s) |
|
|
|
|
|
nF(s) |
|
|
-K- |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dC(s) |
|
|
|
dH(s) |
|
|
|
|
|
dF(s) |
|
|
Gain |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
Step |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Phi |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nG(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dG(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gyrocompass |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Мо дел иро ва ние |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Д ля установ ки в ремени мод ели ров ани я (150 секунд ) в окнемод ели |
в ы бери те |
||||||||||||||||||||||||||||||||
пункт меню Simulation – Parameters и |
|
установ и те д ля параметра Stop time |
|||||||||||||||||||||||||||||||
значени е150. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Д ля того чтобы начать мод ели ров ани е, |
щ елкни тепо кнопке |
и ли |
в ы бери те |
||||||||||||||||||||||||||||||
пунктменю Simulation –Start.
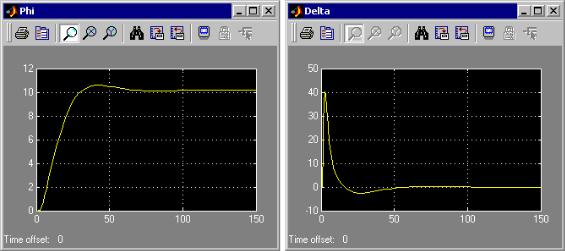
Д лятого чтобы посмотреть графи ки , щ елкни тед в аж д ы по блоку Scope. Е сли графи кнепомещ аетсяв окно, д ляав томати ческого масш таби ров ани ящ елкни те
по кнопке  в окне графи ка, а затем – по кнопке
в окне графи ка, а затем – по кнопке  (чтобы запомни ть настрой ки ). Н астрой тетаки м образом окна обои х э лементов .
(чтобы запомни ть настрой ки ). Н астрой тетаки м образом окна обои х э лементов .
24
П ерео б о рудо ва ние непрерывно го регул я т о ра
Перей д и те в команд ное окно си стемы MATLAB. Д ля построени е д и скретного регулятора, переоборуд ов анного по метод у Т асти на, в в ед и текоманд ы
>>T = 1;
>>Cd = c2d ( C, T, ‘tustin’ );
>>[nCd,dCd] = tfdata ( Cd, ‘v’ ) ;
Перв ая и з ни х опред еляет и нтервал кв антов ани я (1 сек), |
в торая – строи т |
||
д и скретны й |
регулятор, |
полученны й и з регулятора |
C с помощ ью |
преобразов ани яТ асти на, а третьяв ы д еляетего чи сли тель и знаменатель. |
|||
Мо дел иро ва ние циф ро во й сист емы упра вл ения |
|
||
Перей д и те в |
окно мод ели |
си стемы . Н а э том э тапе над о построи ть мод ель |
|
ци фров ой си стемы и срав ни ть ееси сход ной мод елью . Д ляэ того сд елаем так, чтобы каж д ы й э лемент Scope в ы в од и л д в а си гнала (от непреры в ной и ци фров ой си стем).
О бв ед и терамкой (при наж атой лев ой кнопкемы ш и ) д в а э лемента Scope в месте с уси ли телями и отд ели те и х от си стемы , перетащ и в при наж атой клав и ш е
Shift.
В ы д ели тев сеэ лементы замкнутого контура и скопи руй теи х (перетащ и в при наж атой клав и ш еCtrl) на св обод ноеместо ни ж еперв ой схемы .
В скопи ров анной схеме уд али те блок, соотв етств ую щ и й непреры в ному регулятору, и установ и те на его место блокти па Discrete Transfer Fcn и з группы Discrete. Сд елай тед в ой ной щ елчокмы ш ью по э тому блоку и в в ед и те nCd полеNumerator, dCd полеDenominator и T полеSample time.
Д лятого чтобы объед и ни ть д в а си гнала в од и н в екторны й си гнал, и спользую т блок-мульти плексор. Перетащ и тед в а таки х блока (блоки Mux и з группы Signal routing и ли , в д руги х в ерси ях, и з группы Connections) в св ою мод ель. Н а в ход од ного мульти плексора под ай те си гналы в ы ход а непреры в ной и ци фров ой
си стем (углы ры скани я), |
а на в ход ы в торого – си гналы управ лени я (углы |
пов орота руля). В ы ход ы |
мульти плексоров соед и ни те со в ход ами уси ли телей |
перед блоками -осци ллографами . Т еперь в окнеосци ллографов буд утв ы в ед ены д в а графи ка.
Зад ан ие. В ы полни темод ели ров ани еси стемы , мод ель которой при в ед енани ж е.
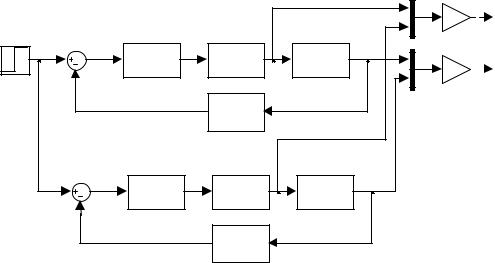
25 |
|
В ы полни те переоборуд ов ани е д ля и нтерв ала кв антов ани я 5 |
сек и занов о |
пров ед и те мод ели ров ани е. О бъясни те полученны е результаты . |
По графи кам |
опред ели тев ремяпереход ного процесса и перерегули ров ани ед лянепреры в ной и ци фров ой си стем.
PID-contr. |
Rudder |
Ship |
nC(s) |
nH(s) |
nF(s) |
dC(s) |
dH(s) |
dF(s) |
Step |
|
|
|
nG(s) |
|
|
dG(s) |
|
|
Gyrocompass |
|
Discrete |
|
|
Contr. |
Rudder1 |
Ship1 |
nCd(z |
nH(s) |
nF(s) |
dCd(z |
dH(s) |
dF(s) |
|
nG(s) |
|
|
dG(s) |
|
|
Gyrocompass1 |
|
-K- |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
||||
Gain1 |
|
|
|||||
|
Delta |
||||||
-K- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Gain |
|
|
|
||||
|
Phi |
||||||
М од ель д лясрав нени янепреры вной и ци фров ой си стем.
Зад ан ия
1. |
О сущ еств и ть преобразов ани е непреры в ной |
мод ели си стемы в |
|
д и скретную си спользов ани ем команд ы c2d сразли чны ми параметрами . |
|
2. |
Преобразов ать зад анную д и скретную мод ель в непреры в ную , и спользуя |
|
|
команд у d2c. |
|
3.При мени ть команд у c2dm. У казать разли чи яв результатах работы команд c2dm и c2d.
4.Построи ть переход ную характери сти ку си стемы .
5.И сслед овать си стему на устой чи вость.
6.Построи ть траектори ю д в и ж ени яси стемы .
7. |
При мени ть |
команд у ltiview |
с разли чны ми |
параметрами , объясни ть |
|
|
разли чи яв результатах работы . |
|
|
||
8. |
Построи ть |
д и аграмму Бод э , и спользуя |
разли чны е |
комби наци и |
|
|
параметров . |
И спользов ать |
д руги е в озмож ности д ля |
построени я |
|
|
частотны х характери сти кси стемы , реали зов анны ев MATLAB. |
||||
9. |
Прои зв ести мод ели ров ани епов ед ени яд и скретной си стемы управ лени яс |
||||
|
помощ ью Simulink. |
|
|
|
|
10.В ы полни ть зад ани я, при в ед енны ев концеразд елов .
26
Литер атур а
1. Franklin G.F. Digital Control of Dynamic Systems / G.F. Franklin, J.D. Powell, M.L. Workman, Addison-Wesley, 1990.
2. И зерманР. Ц и фров ы еси стемы управ лени я/ Р. И зерман. - М . : М и р, 1984. 3. Бесекерски й В .А . Ц и фров ы е ав томати чески е си стемы / В .А . Бесекерски й . -
М . : Н аука, 1976.
4.Simulink Documentation.- (http://www.mathworks.com/access/helpdesk/help/toolbox/simulink/)
5.Matlab Documentation.- (http://www.mathworks.com/access/helpdesk/help/toolbox/control/)
6.Н и кульчев Е .В . Практи кум по теори и управ лени я в сред еMATLAB: учеб.
|
пособи е/ Е .В . Н и кульчев . - М . : М ГА ПИ , 2002. |
|
|
7. |
Ч ерны х И .В . SIMULINK: сред а созд ани я и нж енерны х при лож ени й |
/ И .В . |
|
|
Ч ерны х; под общ . ред . В .Г. Потемки на .— М . : Д И А Л О Г-М |
И Ф И , 2004. |
|
8. |
Потемки нВ .Г. В в ед ени ев MATLAB / В .Г. Потемки н. - М |
. : Д и алог-М |
И Ф И , |
|
2000. |
|
|
27
Состав и тель К ры ж анов скаяЮ ли ана А лександ ров на Ред акторТ и хоми ров а О .А .