

Дано:
LCS3=0,5LCD;
LDS4=0,5LED;
LAB=0.19м;
LCD=0.66м;
LDE=0.64м
n=120 об./мин.
δ=0,04
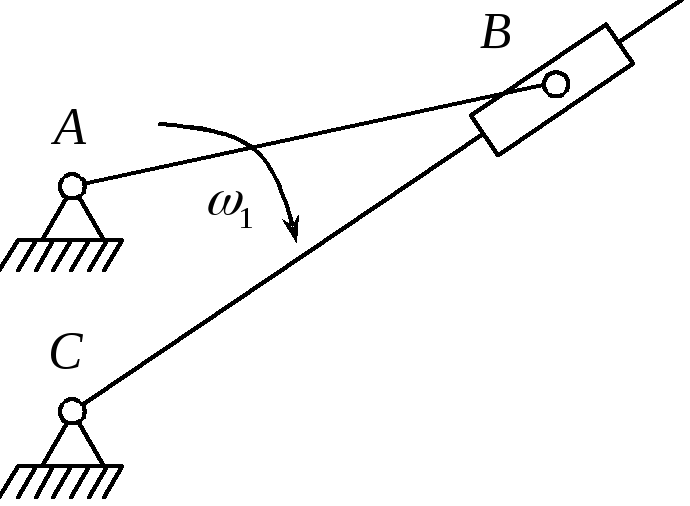
Структурный анализ механизма
![]()
По формуле Чебышева подсчитываем степень подвижности механизма:
![]() ,
,
где ![]() - число
подвижных звеньев;
- число
подвижных звеньев;
![]() - число
низших кинематических пар;
- число
низших кинематических пар;
![]() - число высших кинематических пар;
- число высших кинематических пар;
![]()
![]()
Определим наиболее удаленную от ведущего звена группу Ассура. Определим ее класс и порядок.

II класс
II порядок
Проверим степень подвижности оставшейся части механизма
![]()
Отсоединим следующую группу Ассура. Определим ее класс и порядок.

II класс
II порядок
Проверим степень подвижности оставшейся части механизма

1
![]()
Механизм первого класса
Запишем формулу образования механизма и определим его класс
![]()
![]() Получили в целом
механизм II
класса
Получили в целом
механизм II
класса
![]()
Построение плана механизма
Для того чтобы изобразить механизм на чертеже, необходимо подобрать масштабный коэффициент длины:
![]()
![]()
Выявим крайнее положение механизма, в котором скорость ведомого звена равна нулю. Построим механизм в 12-ти положениях, проведя развертку траектории движения звеньев механизма.
Переменные длины звена ВС для каждого положения.
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
|
м |
0,55 |
0,647 |
0,722 |
0,765 |
0,77 |
0,737 |
0,669 |
0,578 |
0,48 |
0,41 |
0,398 |
0,457 |
Определение скоростей точек механизма
Определим скорость т. В ведущего звена (для второго положения), условно приняв угловую скорость ведущего звена постоянной и равной:
![]()
где
![]() - число оборотов ведущего звена(120
об./мин.).
- число оборотов ведущего звена(120
об./мин.).
![]()
![]()
Выберем масштаб
построения планов скорости, приняв
предварительное значение отрезка
![]() равным 70 мм.
Тогда предварительное значение масштаба.
равным 70 мм.
Тогда предварительное значение масштаба.
![]()
Принимаем масштаб построения планов скоростей
![]()
Определяем значение
отрезка
![]()
![]()
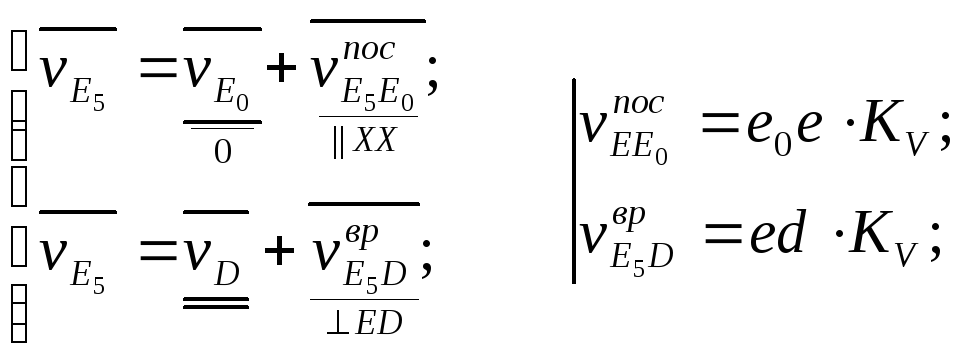
Составим векторные уравнения для определения скоростей всех точек механизма, обозначающих кинематические пары и скорости которых не равны нулю.
а)
точки
![]()
![]()
б)
точка
![]()
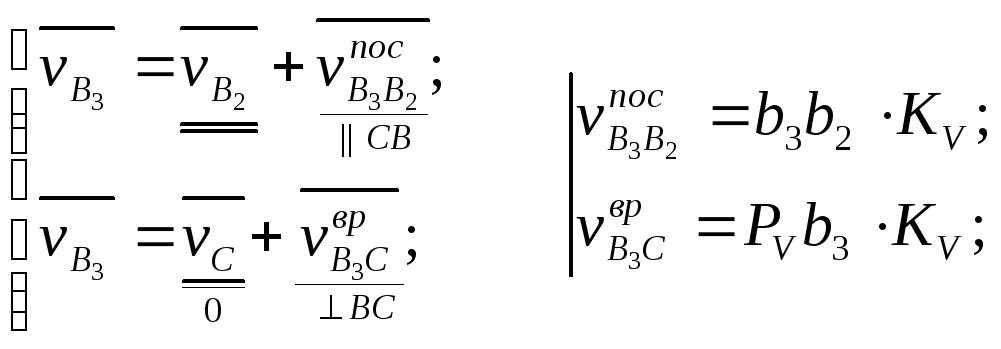
в)
скорость точки
![]() найдем по теореме подобия
найдем по теореме подобия
![]()
г)
точка
![]()
Запишем формулы для определения угловых скоростей звеньев механизма, не совершающих поступательного движения.
![]()
![]()
По теореме подобия получаем формулы скоростей для центров тяжести звеньев
![]()
![]()
![]()
Произведем расчет линейных и угловых скоростей для второго положения механизма.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Таблица скоростей для каждого положения механизма
|
Наимен |
Разм |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
|
|
2,39 |
2,39 |
2,39 |
2,39 |
2,39 |
2,39 |
2,39 |
2,39 |
2,39 |
2,39 |
2,39 |
2,39 |
|
|
|
2,39 |
2,12 |
1,46 |
0,59 |
0,34 |
1,2 |
1,97 |
2,37 |
2,19 |
1,1 |
0,67 |
2 |
|
|
|
0 |
1,1 |
1,895 |
2,32 |
2,37 |
2,04 |
1,36 |
0,33 |
0,96 |
2,12 |
2,29 |
1,3 |
|
|
|
0 |
1,14 |
1,73 |
2 |
2,03 |
1,83 |
1,34 |
0,38 |
1,32 |
3,4 |
3,8 |
1,89 |
|
|
|
0 |
1,03 |
1,66 |
1,99 |
2,04 |
1,8 |
1,33 |
0,37 |
1,29 |
3,4 |
3,77 |
1,73 |
|
|
|
0 |
0,5 |
0,62 |
0,48 |
0,24 |
0,01 |
0,15 |
0,06 |
0,19 |
0,03 |
0,96 |
0,8 |
|
|
|
0 |
1,7 |
2,6 |
3,03 |
3,08 |
2,8 |
2,03 |
0,57 |
2 |
5,2 |
5,8 |
2,8 |
|
|
|
0 |
1,8 |
2,7 |
3,1 |
3,2 |
2,9 |
2,09 |
0,6 |
2,3 |
5,3 |
5,94 |
2,95 |
|
|
|
0 |
0,57 |
0,87 |
1 |
1,02 |
0,92 |
0,67 |
0,19 |
0,66 |
1,7 |
1,15 |
0,94 |
|
|
|
0 |
1,06 |
1,67 |
1,98 |
2,03 |
1,8 |
1,3 |
0,37 |
1,3 |
3,4 |
3,75 |
1,77 |
Определение ускорений
Определяем ускорение
точки В1
ведущего звена (во втором положении)
при условии, что
![]() .ε1=0
.ε1=0
![]()
![]()
Выберем масштаб
построения планов ускорений, приняв
предварительное значение отрезка
![]() равным 70 мм.
Тогда предварительное значение масштаба.
равным 70 мм.
Тогда предварительное значение масштаба.
![]()
Принимаем масштаб построения планов ускорений
![]()
Определяем значение
отрезка
![]()
![]()
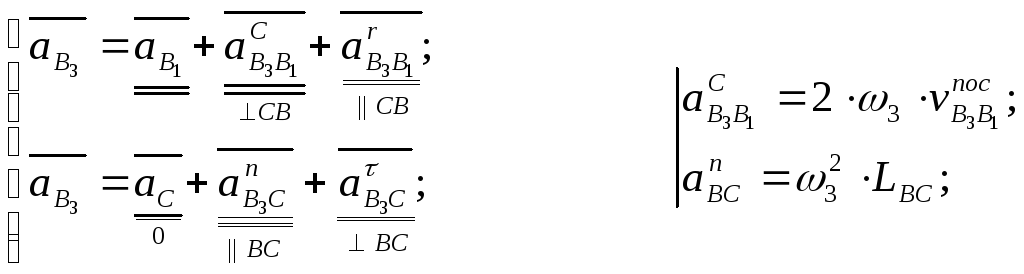
Составим векторные уравнения для определения ускорений тех же точек механизма, которые были выбраны для векторных уравнений скоростей.
а)
точки
![]()
![]()
б)
точка
![]()
в)
скорость точки
![]() найдем по теореме подобия
найдем по теореме подобия
![]()
г)
точка
![]()

Запишем формулы для определения угловых ускорений звеньев механизма, не совершающих поступательного движения и угловая скорость которых не постоянна.
![]()
По теореме подобия получаем формулы ускорений для центров тяжести звеньев, для которых заданы веса и траектории движения, которых не являются прямыми линиями.
![]()
Произведем расчет линейных и угловых ускорений для второго положения механизма
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
Таблица ускорений для каждого положения механизма
-
Наимен
Разм
0
2
29,97
29,97
0
7,6

0
18,08


0
4,9
29,97
12,88

29,97
13,76
35,96
12,6


31,68
17,3

0
0

0
4,7

1,7
0,24
32,8
14,95


17,98
6,3
54,5
17,84

2,7
0,375
Построение кинематических диаграмм
Выбираем масштабный
коэффициент построения диаграммы
![]() изменения линейной скорости ведомого
звена механизма в зависимости от времени
(при условии, что
изменения линейной скорости ведомого
звена механизма в зависимости от времени
(при условии, что
![]() )
)
![]()
Определяем масштабный коэффициент времени по формуле
![]()
где ![]() - число оборотов ведущего звена.
- число оборотов ведущего звена.
![]() - отрезок изображающий время одного
оборота ведущего звена (примем равным
180 мм).
- отрезок изображающий время одного
оборота ведущего звена (примем равным
180 мм).
Методом графического
интегрирования (метод площадей) диаграммы
![]() построим диаграмму перемещения ведомого
звена механизма
построим диаграмму перемещения ведомого
звена механизма
![]() .
.
Масштабный
коэффициент диаграммы
![]() определяем по формуле
определяем по формуле
![]()
где ![]()
Определяем максимальное перемещение ведомого звена на плане механизма
![]()
и на диаграмме перемещения
![]()
где ![]() - максимальный ход ведомого звена на
плане механизма, мм;
- максимальный ход ведомого звена на
плане механизма, мм;
![]() - максимальная ордината на диаграмме
перемещений, мм;
- максимальная ордината на диаграмме
перемещений, мм;
и сравним их.
Определим ошибку при определении хода ведомого звена в процентах.
![]()
Методом графического
дифференцирования диаграммы
![]() построим диаграмму ускорений ведомого
звена механизма
построим диаграмму ускорений ведомого
звена механизма
![]() .
Масштабный коэффициент диаграммы
.
Масштабный коэффициент диаграммы
![]() определим по следующей формуле
определим по следующей формуле
![]()
Значение ускорений
ведомого звена
![]() ,
,
![]() и значения ошибок при их определении в
нулевом и втором положениях механизма
внесем в таблицу.
и значения ошибок при их определении в
нулевом и втором положениях механизма
внесем в таблицу.
![]()
|
Положение |
|
|
|
|
2 |
17,3 |
16,5 |
4,6 |