

2.7. Выводы по разделу
В данном разделе были определены коэффициенты обратных связей по скорости и току, максимальное напряжение задания задат-чика скорости, коэффициенты промежуточного усилителя по каналам задающего воздействия и обратных связей, а так же построены статические электромеханические характеристики электропривода в замкнутой и разомкнутой системе управления.
Раздел 3. Расчет динамики электропривода
В данном разделе рассматривается возможность получения динамических показателей работы спроектированного электропривода в соответствии с заданными, т.е. строится и анализируется переходный процесс в системе электропривода.
Под переходными процессами понимают процессы, происходящие в электроприводе при переходе его из одного установившегося состояния в другое, когда изменяется скорость, момент и ток.
Переходные процессы играют огромную роль в работе электропривода и рабочей машины. Характер их протекания предопределяет производительность машины, качество выпускаемой продукции, а также заметно сказывается на режимах работы электропривода.
Характер переходного процесса зависит от свойств всех элементов привода и рабочей машины, поэтому можно выделить следующие основные задачи;
- определить нуждается ли система электропривода в дополнительной коррекции для соответствия заданным показателям качества, и рассчитать параметры корректирующего устройства;
- построить переходный процесс в системе электропривода и определить показатели качества переходного процесса.
Требуется, уяснив работу электропривода по структурной схеме, составить передаточные функции элементов системы, составить передаточную функцию замкнутой системы, проверить ее на устойчивость, синтезировать (если необходимо) корректирующее устройство, построить переходный процесс и определить показатели качества работы системы. Необходимо вычертить структурные схемы некорректированной и скорректированной систем.
3.1. Составление структурной схемы системы электропривода постоянного тока для расчета его динамики
На основе функциональной схемы (рис.2.1) можно составить обобщенную структурную схему замкнутой системы электропривода со всеми обратными связями (рис.3.1).

Рис.3.1. Обобщенная структурная схема замкнутой системы электропривода.
В курсовом проекте можно ограничиться расчетом динамики системы, не учитывая задержанную обратную связь по току, вследствие ее нелинейности и сложности расчетов. Поэтому обобщенную схему (рис.3.1) можно перерисовать (рис.3.2).
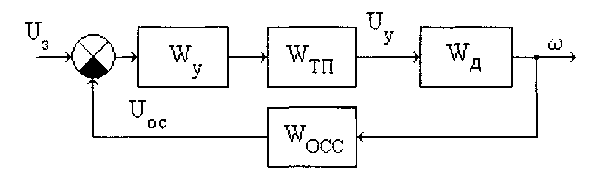
Рис.3.2. Упрощенная структурная схема замкнутой системы электропривода.
Упрощенная структурная схема (рисЗ.2.) представляет собой графическое изображение системы уравнений динамики всех звеньев, участвующих в формировании динамических характеристик системы. Первоначально структурная схема вычерчивается без корректирующих звеньев, а после их выбора и расчета структурная схема приобретает окончательный вид.