

4. Порядок выполнения работы
4.1 Получить реакцию регулятора на ступенчатое возмущающее воздействие, выполнив следующие операции:
а) Установить заданное значение регулируемого параметра примерно на одной трети от его максимально возможного значения по статической характеристике (см. л.р. №1).
в) При помощи переключателя "А" перевести установку в автоматический режим, дождаться достижения выходной величины заданного значения х = хЗ. Когда переходный процесс окончен, сигнал рассогласования на входе регулятора равен нулю.
г) Изменить заданное значение регулируемого параметра задатчиком на 5-25% (в зависимости от КОБ) диапазона изменения регулируемой величины, одновременно с этим разомкнуть систему. Иначе говоря, подать однократное ступенчатое возмущающее воздействие на вход регулятора.
д) С момента изменения задания по указателю положения вала ИМ фиксировать текущие значения y через 1.5-2 с в течение 2-2.5 мин или до момента достижения предельного значения ymax (до срабатывания концевого выключателя) в журнале наблюдений.
е) По полученным экспериментальным данным построить траекторию изменения положения вала ИМ во времени (кривую разгона ПИ-регулятора). Примерный вид кривой разгона ПИ‑регулятора показан на рис.15:

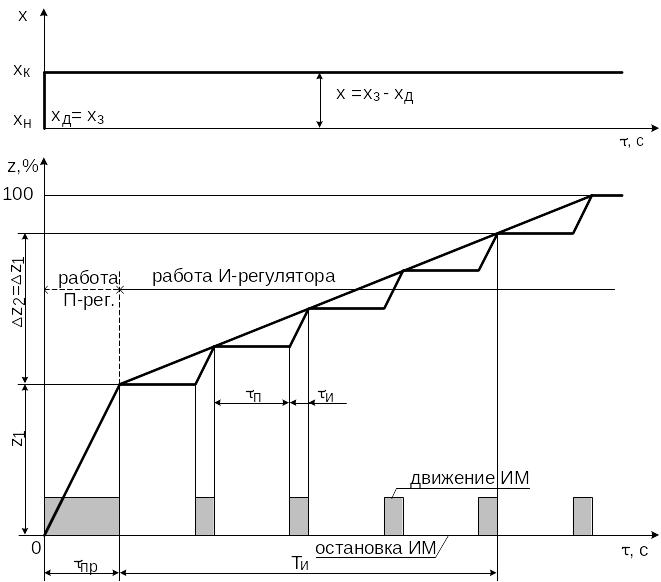
Рис.15 – Траектории изменения сигнала х на входе ПИ-регулятора и положения вала ИМ y во времени
4.2 По кривой разгона ПИ-регулятора (см. рис.15) определить установленные значения параметров регулятора КР и ТИЗ:
а) определить угол поворота вала ИМ под действием пропорциональной части, т.е. y1 = КР·х;
б) рассчитать значение коэффициента передачи регулятора
![]()
в) определить интервал времени от момента времени ПР до времени, за который ИМ повернется на угол z2 = z1 под действием интегральной части. Полученное значение времени и будет искомой величиной ТИЗ.
4.3 Пользуясь результатами, полученными при определении значений динамических параметров объекта КОБ, З, ТО из л.р. №2, рассчитать по методу полной компенсации (31) параметры динамической настройки ПИ-регулятора.
4.4 Установкой значений КР и ТИЗ на панели регулятора, добиться получения такой кривой разгона ПИ-регулятора, чтобы его показатели (КР и ТИЗ) совпали с рассчитанными в п.п.4.3 (метод ОМ).
4.5. Оценить разницу расчетных и экспериментальных значений параметров динамической настройки ПИ-регулятора. Сделать выводы.
5. В отчете необходимо представить следующие материалы
5.1 Описание взаимодействия регулятора и ОУ.
5.2 Описание существующих типовых законов регулирования и физической сущности параметров динамической настройки КР, ТИЗ, ТП.
5.3 Методики определения параметров настройки регулятора по динамическим параметрам ОУ.
5.4 Экспериментальная кривая разгона ПИ-регулятора с рассчитанными по ней настройками регулятора.
5.5 Сравнение расчетных и экспериментальных значений настроек регулятора, выводы по работе.
6. Вопросы для самоконтроля
6.1 Перечислите типовые законы регулирования и напишите формулы зависимости.
6.2 В каких случаях целесообразно применять ПИД‑регулятор и почему?
6.3 Перечислите методы определения оптимальных параметров настройки регуляторов.
6.4 Назовите преимущества использования ПИ-регулятора.
6.5 Какие показатели качества переходных процессов вы знаете, считаете наиболее существенными?
6.6 Каким образом можно получить кривую разгона регулятора?