

2. Порядок выполнения работы
2.1 Подготовить рабочий журнал наблюдений с таблицей 3.
2.2 Включить ПЭВМ и дождаться загрузки программы имитации «САУ».
Таблица 3
Экспериментальные данные
№ |
X, % хода ИМ |
Y, единицы регулируемой величины |
Y, единицы регулируемой величины |
|
|
|
1 |
0 |
.. |
––– |
––– |
|
|
2 |
10 |
.. |
.. |
|
|
|
.. |
.. |
.. |
.. |
|
|
|
.. |
.. |
.. |
.. |
|
|
|
.. |
100 |
.. |
.. |
|
|
|
2.3 Из меню «Файл» выбрать команду «Открыть вариант» и выбрать номер заданного варианта. Подтвердить выбор нажатием кнопки «Выбрать».
2.4 С помощью блока ручного управления (см. рис.1) установить ручной режим управления.
2.5 Кнопками больше «>» и меньше «<» установить значение входного параметра на отметку 0% хода ИМ. Установку осуществить по указателю положения вала ИМ. Дождаться достижения выходной величиной установившегося значения.
2.6 Зафиксировать в журнале наблюдений значение X и Y.
2.7 При помощи кнопок «>» и «<» установить положение вала ИМ на 10% хода; дождаться перехода Y в новое установившееся значение по шкале вторичного прибора и занести данные в журнал наблюдений.
2.8 Повторить пункт 2.7 для 20, 30,..., 100% угла поворота вала ИМ.
2.9 На основе полученных данных построить график статической характеристики ОУ в координатах % хода вала ИМ (Х) – единицы регулируемого параметра (Y).
Примерный график статической характеристики приведен на рис.6.
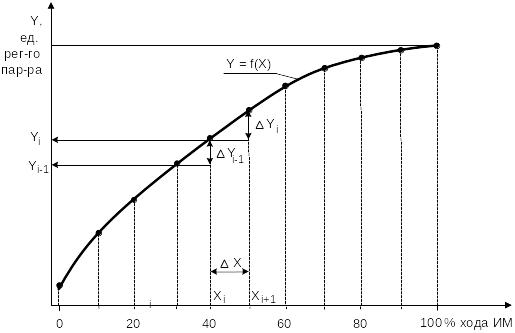
Рис.6 Статическая характеристика объекта управления
2.10
Определить величину приращения выходного
(регулируемого) параметра
![]() и занести в журнал наблюдений.
и занести в журнал наблюдений.
![]() (8)
(8)
2.11 Для каждого опыта определить величины значений коэффициентов передачи объекта по формуле (1) и занести в журнал полученные результаты.
2.12 Построить график зависимости КОБ = f(x) следующим образом:
- на оси X нанести отрезки, равные X;
- из середины каждого отрезка провести линии параллельно оси Y и отложить на них значения КОБ, для каждого отрезка X;
- соединить полученные точки плавной линией, что и будет графиком функции КОБ = f(x).
Примерный график зависимости приведен на рис.7.

Рис.7 График зависимости КОБ = f(x)
2.13 Используя метод наименьших квадратов определить уравнение линии регрессии . Для этого:
а) в зависимости от вида полученной статической характеристики задаться степенью полинома уравнения линии регрессии;
б) составить систему уравнений для определения коэффициентов линии регрессии (для полинома второго порядка система уравнений имеет вид (3), для полинома третьего порядка – (5));
в) решив систему уравнений, определить коэффициенты уравнения линии регрессии.
2.14 Совместно с графиком экспериментальной статической характеристики построить график уравнения линии регрессии.
2.15
Определить уравнение линии изменения
коэффициента передачи объекта как
![]() .
Внести рассчитанные значения в таблицу
3.
.
Внести рассчитанные значения в таблицу
3.
2.16
Построить график уравнения коэффициента
передачи объекта
![]() совместно с графиком изменения
коэффициента передачи объекта
совместно с графиком изменения
коэффициента передачи объекта
![]() ,
определенным экспериментальным
путем по формуле (1).
,
определенным экспериментальным
путем по формуле (1).
2.17 Определить максимальную величину отклонения расчетных значений статической характеристики от экспериментальных данных, т.е.
![]() (9)
(9)
2.18 Сделать выводы о типе полученной статической характеристике ОУ.