

4.2 Подбор пружины
Сила предварительного натяжения пружины:
![]() , (4.3)
, (4.3)
Осевая сила Fа и сила трения Fтр могут быть выражены через приведенный к валу момент сопротивления в конце закрывания задвижки – Tзакр.
![]() ;
;
![]() ,
,
где Dk
– средний диаметр кулачков муфты; dв
–
диаметр вала;
f
– коэффициент трения в шпоночном или
шлицевом соединении (0,15);
![]() – приведенный угол трения кулачков;
αз
–
угол поверхности кулачка, работающей
при закрывании.
– приведенный угол трения кулачков;
αз
–
угол поверхности кулачка, работающей
при закрывании.![]() ;
fk
= 0,12.
;
fk
= 0,12.
Для того, чтобы исключить самоторможение при выходе кулачков из зацепления, угол αз должен быть больше угла трения. Обычно αз >20°. После подстановки значений Fa и Fтр в условие (4.3) получаем значение предварительного натяжения пружины (во включенном состоянии):
![]() , (4.4)
, (4.4)
При обратном ходе следует исключить возможность срабатывания муфты, поэтому угол заострения αо кулачков полумуфт, работающих при открывании, должен быть меньше угла трения:
![]() ;
;
![]() .
.
Fпр по уравнению (4.4) – это фактическая Fупр. пружины, которая удерживает кулачки во включенном состоянии.
Fупр.выкл. ≈ 1,2 Fупр.вкл. = Fmax

Рис. 4.3. Упругая характеристика пружины.
λp – рабочий ход полумуфты при сжатии пружины.
Определение габаритов пружины
Задаёмся
индексом пружины –
![]() .
.
Исходя из данных литературных источников (3 Андреева), принимаем m = 6, назначаем материал пружины - ст60С2.
Поправочный
коэффициент:
![]() .
.
Определяем диаметр проволоки пружины, исходя из уравнения прочности на кручение (перерезывающей силой принебрегаем).
![]() (4.5)
(4.5)
[τ]кр = (0.4 ÷ 0.6) σвр; σвр для ст60С2 – 130 кг/мм2.
 см,
см,
где [τ]кр =0.4·130 = 5200 кг/см2
Средний диаметр пружины:
dср = mdпров = 6·dпров = 6·1=6 см
dвн = dср – dпров=6-1=5 см
Принимаем рабочий ход пружины λp = 3 мм, т.е. на ½ высоты кулачка предохранительной муфты.
Рабочее число витков пружины:
![]() . (4.6)
. (4.6)
Максимальное перемещение λmах:
![]() мм.
мм.
G для стали ст60С2 = 8·103 кг/мм2
Шаг пружины:
![]() .
.
H0 – полная высота ненагруженной пружины:
H0 = Hпр + np(t – d)
Нпр = (n0 – 0.5)dпров – высота нагруженной пружины.
n0 – число витков ненагруженной пружины:
n0 = nраб +2
Два витка идут на обработку торцов (см. рис. 4.4).

Рис. 4.4. Пружина сжатия.
Длина заготовки, из которой изготавливается пружина:
![]() ,
,
где α – угол навивки проволоки.

Рис. 4.5. Развертка витка пружины
Габариты пружины определить самостоятельно исходя из данных заданной схемы.
4.3. Защита им от перегрузок при наличии подвижной червячной передачи
Устройство для защиты исполнительного механизма от перегрузки при наличии червячной передачи может быть сконструировано на валу червяка. Для определения места расположения механизма защиты необходимо знать направление вращения гайки в передаче винт-гайка. Оно определяется направлением движения вала двигателя и направлением нарезки шпинделя (рис. 4.6).
Для выяснения этого вопроса следует графически решить векторное уравнение:
![]() , (4.7)
, (4.7)
где Vг – окружная скорость гайки в точке А; Vв – скорость перемещения шпинделя (винта); Vвг – скорость перемещения гайки относительно винта, направленная параллельно нарезке.
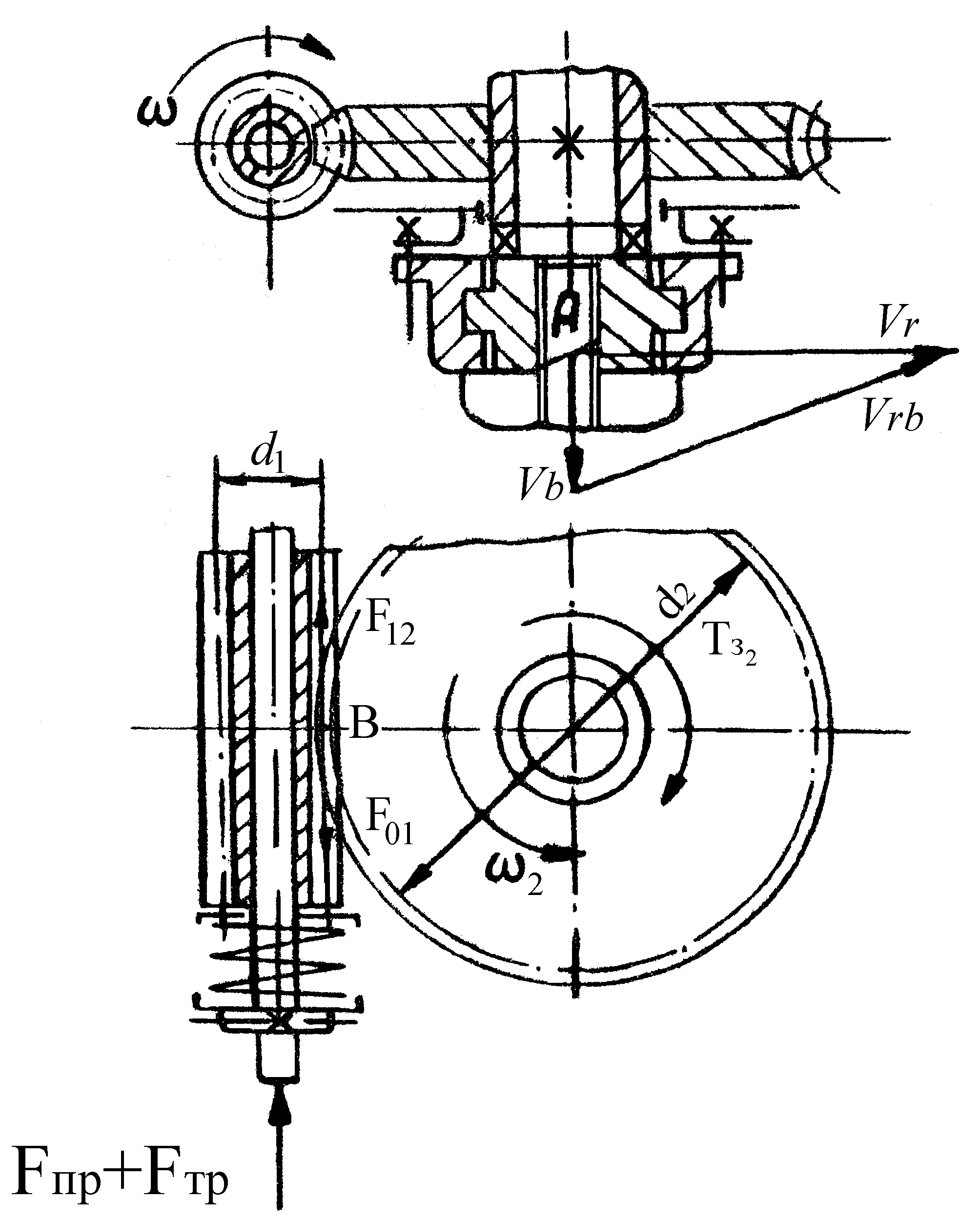
Рис. 4.6. Схема для определения сил, действующих на защитное устройство.
При закрывании задвижки выходной вал редуктора должен вращаться по часовой стрелке. Этим определяется направление окружной силы колеса Ft2 и осевой силы червяка Fa1. Червяку необходимо обеспечить свободу перемещения в осевом направлении. Осевая сила Fa1 на червяке должна быть уравновешена упругостью пружины и трением на боковых гранях шлицов или шпонок:
![]() , (4.8)
, (4.8)
где Fтрш – сила трения в шлицевом соединении; Tзакр2 – момент в конце закрывания запорного органа на валу червячного колеса.
Сила трения на боковых гранях шлицев:
![]() , (4.9)
, (4.9)
где α – угол профиля витков червяка, равный 20°; dш – диаметр шлицевого вала червяка; ρ* – приведенный угол трения на поверхности витков червяка;
![]() ;
;
![]() ;
;
Для материалов сталь-бронза f = 0,88. Подставляя эти значения в равенство (4.8), получаем величину предварительного натяжения пружины:
![]() , (4.10)
, (4.10)
Источником Fпр в приводах заданных типов является, как правило, цилиндрическая винтовая пружина растяжения-сжатия.
Чтобы предотвратить ложные срабатывания узла защиты, необходимо дать запас хода пружины 3 + 4 мм, Величину отношения Fпр(max)/ Fпр следует задавать в пределах 1,1 ÷ 1,2, чтобы получить пологую характеристику, так как по мере перемещения . подвижного элемента узла защиты (подвижная полумуфта, рис. 4.1, и подвижный червяк, рис. 4.6) усилие со стороны пружины растет пропорционально углу наклона упругой характеристики. В случае крутой характеристики концевой выключатель может ложно сработать, тогда момент значительно превысит расчетное значение.
Для предотвращения аварийной ситуации в случав отсутствия электроэнергии привод задвижки должен быть обеспечен механизмом ручного привода.
Силовым фактором, исходя из величины которого определяются размеры ручного привода, является наибольший момент задвижки (при закрывании или открывании).
Для отключения электродвигателя при верхнем положении запорного органа предназначена коробка концевых выключателей. Она служит для передачи сигнала на пульт управления о крайних положениях запорного органа задвижки.