

2. Описание работы исполнительного механизма на примере двухдисковой запорной задвижки
Исполнительное устройство, в соответствии с техническим заданием (см. схему своего варианта), содержит: электродвигатель во фланцевом исполнении 1, редуктор 2, передачу винт-гайка 3, одно из звеньев которой непосредственно связано с запорным органом-задвижкой 7, устройства сигнализации 4, защиты 5 и ручной привод 6.
Назначение запорного органа – перекрывать проход в трубопроводе, отделяя одну его часть от другой, если это соответствует программе технологического процесса или для целей ремонта, замены оборудования, а также в случае аварии.
Работа исполнительного устройства при закрывании задвижки происходит следующим образом: по команде с пульта управления двигатель включается и через редуктор передаёт вращательное движение гайке передачи винт-гайка, опирающейся буртом (или шарикоподпятником) на неподвижную поверхность. Вращательное движение гайки преобразуется в поступательное движение винта, который подвижно соединён с клиновой двухдисковой задвижкой (рис. 2.1). Диски 3 и 4 задвижки висят на квадратной головке шпинделя и перемещаются в направляющих (рис. 2.2).
При закрывании, когда диски перекроют трубопровод, силы, вызванные перепадом давления среды, прижмут один из них (4) к кольцу корпуса. За счёт сил трения этот диск остановится и будет неподвижен, пока не выберется «мёртвый ход» винта.
Осевая сила начнёт значительно расти после того, как нижний упор клина коснётся корпуса, в результате клин остановится. Движение дисков навстречу клину будет сопровождаться отжатием их в стороны и дальнейшим увеличением удельных давлений на уплотняющих поверхностях.
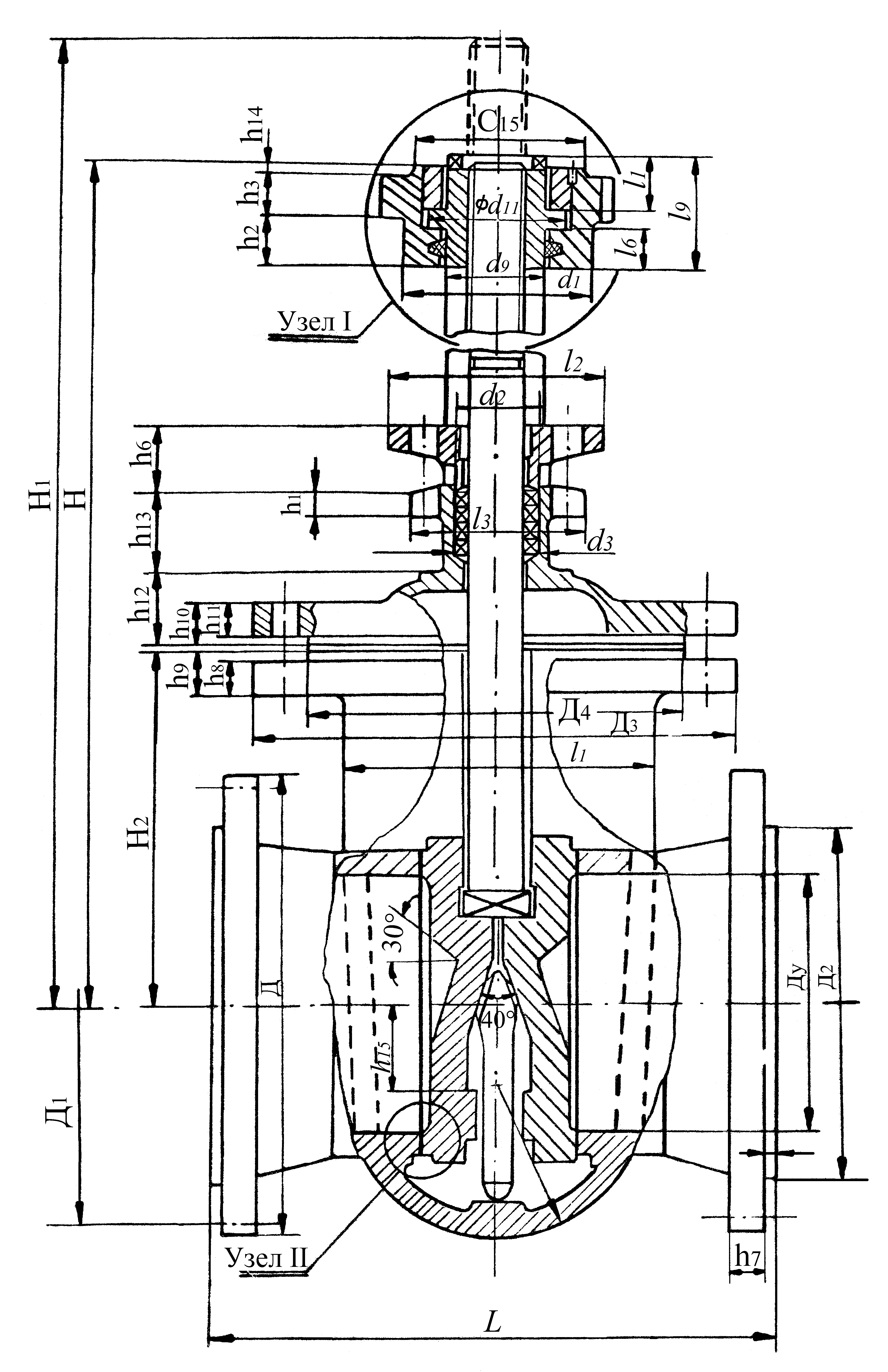
Рис. 2.1. Конструкция задвижки с элементами привода
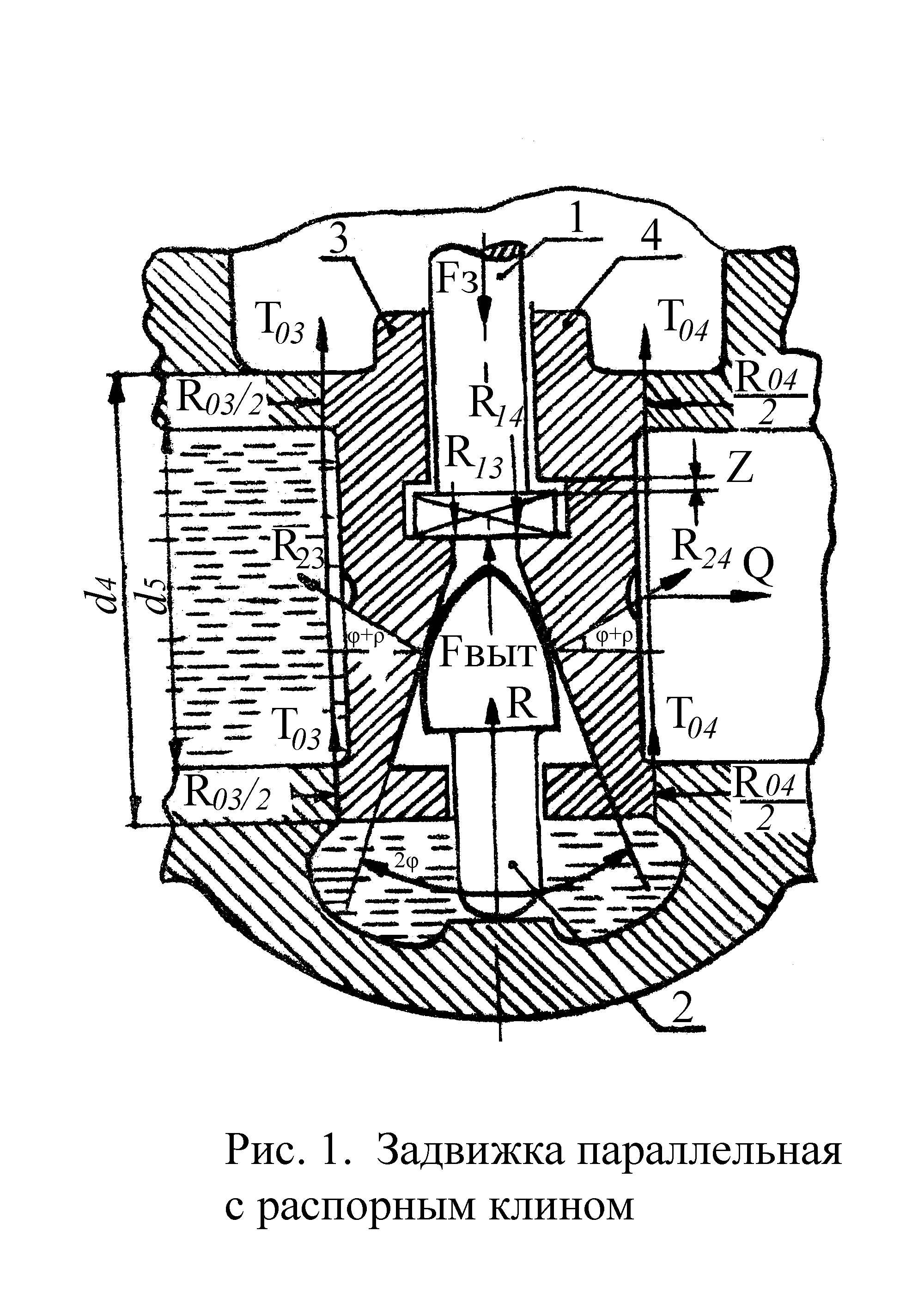
Рис 2.2. Задвижка с параллельными дисками и распорным клином
Когда осевая сила винта достигнет заданного (расчётного) значения, даётся команда с пульта управления и электродвигатель выключается. Запорный орган остается в положении «закрыто», что обеспечивается силами трения на поверхности резьбы самотормозящейся передачи винт-гайка.
При открывании задвижки двигатель, включённый по команде с пульта управления, через редуктор передаёт движение винту в обратном направлении. Когда шпиндель выберет «мёртвый ход», осевая сила, направленная по движению винта, уменьшится до нуля. Мощность, затрачиваемая двигателем, расходуется на преодоление сил трения в передаче винт-гайка. После выбора «мёртвого хода» начинают перемешаться диски, из которых один (4) прижат к уплотняющей поверхности корпуса средой. Силы трения, особенно большие в начале движения, будут нагружать винт осевой силой, направленной против движения. Когда осевая сила, действующая на винт, достигнет предельно допустимой величины, механизм защиты выключит электродвигатель.
Коробка концевых выключателей (рис. 2.3) предназначена для сигнализации на пульт управления о крайних положениях запорного органа и блокировки привода в аварийных ситуациях, а также для отключения электродвигателя при верхнем положении запорного органа задвижки.

Рис. 2.3. Коробка концевых выключателей
Тип коробки выключателя выбирается в зависимости от количества оборотов гайки, которые она совершает между крайними положениями запорного органа (табл. 2.1).
Таблица 2.1
Типы коробок концевых выключателей
Число оборотов гайки |
Марка или тип коробки |
1 – 3 |
А |
3 – 7 |
Б |
7 – 14 |
В |
14 – 35 |
Г |
35 – 37 |
Д |
75 – 160 |
Е |
Присоединительные размеры у всех типов коробок одинаковы и соответствуют данным рис. 5. Защита механизмов от перегрузок осуществляется с помощью концевого выключателя типа АВ-01 (рис. 2.3).