

9.7.2 Rake приемники
Rake приемник это тип приемника, который сочетает в себе измерение канала с получением данных при помощи итераций. Это в первую очередь применимо к системам с расширенным спектром, в которых входные сигналы являются псевдо-шум (PN) последовательностями. Это, по сути, просто расширение метода измерений псевдо-шума, который был описан в предыдущем пункте. Прежде чем рассматривать rake приемник, будет полезно рассмотреть двоичное обнаружение, при условии, что канал является хорошо известным и не изменяется в течение срока действия сигнала.
Пусть
на вход U
приходит один из двух сигналов
![]() и
и
![]() .
Обозначим известные волны канала как
.
Обозначим известные волны канала как
![]() .
Тогда выход канала, до добавления белого
шума, будет либо
.
Тогда выход канала, до добавления белого
шума, будет либо
![]() ,
который мы обозначим через
,
который мы обозначим через
![]() ,
или
,
или
![]() ,
который мы обозначим через
,
который мы обозначим через
![]() .
Эти свертывания содержатся в интервале
.
Эти свертывания содержатся в интервале
![]() .
После добавления белового гауссового
шума, выход равен
.
После добавления белового гауссового
шума, выход равен
![]() или
или
![]() .
Проблема обнаружения решается наблюдением
V,
которая из этих двух возможностей будет
более вероятна. LLR для этой проблемы
обнаружения показана в разделе 8.3.4, в
формуле (8,27), которая указана ниже,
.
Проблема обнаружения решается наблюдением
V,
которая из этих двух возможностей будет
более вероятна. LLR для этой проблемы
обнаружения показана в разделе 8.3.4, в
формуле (8,27), которая указана ниже,
 В
упражнении 9.17 показано, что если
В
упражнении 9.17 показано, что если
![]() и
и
![]() являются
идеальными PN последовательностями, т.
е. последовательностями, которые
удовлетворяют (9.68), тогда
являются
идеальными PN последовательностями, т.
е. последовательностями, которые
удовлетворяют (9.68), тогда
![]() .
Тест ML затем упрощается до
.
Тест ML затем упрощается до
 Наконец,
для i
= 0, 1, внутренний продукт
Наконец,
для i
= 0, 1, внутренний продукт
![]() это просто выход в эпохе 0, когда v
является
входом с фильтром согласования
это просто выход в эпохе 0, когда v
является
входом с фильтром согласования
![]() .
Однако фильтр согласования
это просто фильтр согласования
.
Однако фильтр согласования
это просто фильтр согласования
![]() свернутый с фильтром согласования
свернутый с фильтром согласования
![]() .
Блок-схема, демонстрирующая это показана
на рисунке 9.11.
.
Блок-схема, демонстрирующая это показана
на рисунке 9.11.
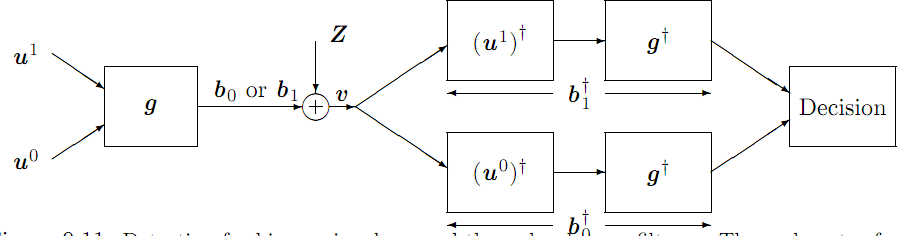
Рисунок
9.11: Обнаружение для двоичных сигналов,
прошедших через известный фильтр
.
Сравниваются вещественные части входов,
являющихся решениями в эпоху 0.
![]() ,
если действительная часть больше нижнего
входа, и U = u1 если выбрано иное.
,
если действительная часть больше нижнего
входа, и U = u1 если выбрано иное.
Если
сигналы выше являются PN последовательностями,
то существует большое сходство между
рисунками 9.9 и 9.11. В частности, если
![]() было отправлено, то выход фильтра
согласования
было отправлено, то выход фильтра
согласования
![]() ,
то
есть первая часть низшего фильтра
согласования, будет
,
то
есть первая часть низшего фильтра
согласования, будет
![]() в отсутствие шума. Отметим, что вектор
в отсутствие шума. Отметим, что вектор
![]() означает,
что выход без шума в эпоху k
равен
означает,
что выход без шума в эпоху k
равен
![]() . Аналогично, если
. Аналогично, если
![]() было отправлено, то выход без шума первой
части верхнего фильтра согласования в
эпоху k
будет
было отправлено, то выход без шума первой
части верхнего фильтра согласования в
эпоху k
будет
![]() .
Решение принятое в приемнике во времени
0 после последовательности
.
Решение принятое в приемнике во времени
0 после последовательности
![]() ,
наряду с шумом, проходит через
несуществующий фильтр
,
наряду с шумом, проходит через
несуществующий фильтр
![]() .
Эти несуществующие фильтры возможны
при задержки тайминга в приемнике
относительно передатчика.
.
Эти несуществующие фильтры возможны
при задержки тайминга в приемнике
относительно передатчика.
Предположив,
что правильное решение принято, оценка
также может быть сделана из фильтра
канала
![]() .
В частности, если решение -
,
то выходы первой части низшего
соответствующего фильтра, во время
приема - от
.
В частности, если решение -
,
то выходы первой части низшего
соответствующего фильтра, во время
приема - от
![]() до 0, будут масштабироваться в версии с
шумом от
до 0, будут масштабироваться в версии с
шумом от
![]() до
до
![]() .
Вместо того, чтобы использовать эти
выходы в качестве ML оценки фильтрованных
волн, они должны сочетаться с ранними
оценками, постоянно обновляя текущую
оценку каждой n
эпохи. Это означает, что если время
согласования велико, тогда фильтрованные
волны будут изменяться во времени очень
медленно, поэтому если продолжать набор
оценок канала в каждый момент времени
n,
то эти оценки могут быть использованы
для постоянного улучшения и отслеживания
фильтрованных волн канала.
.
Вместо того, чтобы использовать эти
выходы в качестве ML оценки фильтрованных
волн, они должны сочетаться с ранними
оценками, постоянно обновляя текущую
оценку каждой n
эпохи. Это означает, что если время
согласования велико, тогда фильтрованные
волны будут изменяться во времени очень
медленно, поэтому если продолжать набор
оценок канала в каждый момент времени
n,
то эти оценки могут быть использованы
для постоянного улучшения и отслеживания
фильтрованных волн канала.
Отметим,
что решение на рисунке 9.11 было основано
на знании
и
знании фильтра согласования
![]() .
Возможность оценить
в рамках обнаружения данных таким
образом, позволяет в то же время нам
улучшить оценку
.
При
.
Возможность оценить
в рамках обнаружения данных таким
образом, позволяет в то же время нам
улучшить оценку
.
При
![]() (и правильном решении), выходы фильтра
согласования
(и правильном решении), выходы фильтра
согласования
![]() обеспечивают оценку
,
и, следовательно, позволяют обновлять
.
Объединенная структура для принятия
решений и оценки канала называется rake
приемник и изображена на рисунке 9.12.
обеспечивают оценку
,
и, следовательно, позволяют обновлять
.
Объединенная структура для принятия
решений и оценки канала называется rake
приемник и изображена на рисунке 9.12.
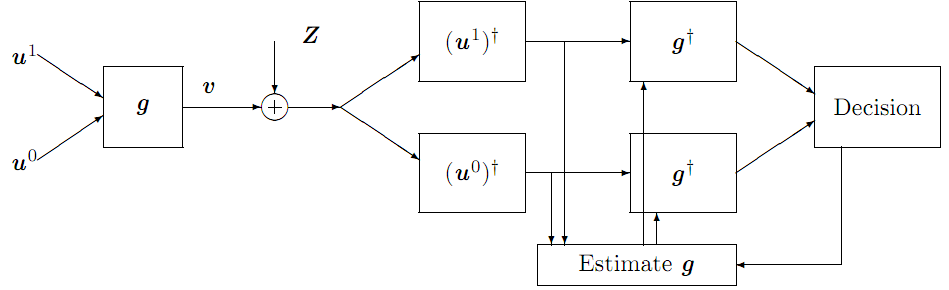
Рисунок
9.12: Rake
приемник. Если
![]() ,
то соответствующие
,
то соответствующие
![]() выходы фильтра согласования
выходы фильтра согласования
![]() используются
для обновления оценки
( следовательно, и волны каждого фильтра
согласования
используются
для обновления оценки
( следовательно, и волны каждого фильтра
согласования
![]() ).
Кроме того, если
).
Кроме того, если
![]() ,
то используется выход из фильтра
согласования
,
то используется выход из фильтра
согласования
![]() .
Затем используются обновленные фильтры
согласования
.
Затем используются обновленные фильтры
согласования
![]() ,
со следующим блоком выходов от
и
для
принятия следующего решения, и так далее
для последующих оценок и решений.
,
со следующим блоком выходов от
и
для
принятия следующего решения, и так далее
для последующих оценок и решений.
Структура
rake
приемника предполагает хорошую работу,
если время согласования канала включает
множество точек решения. То есть,
обновление оценки канала производит
одно решение, которое может быть
использовано для последующих решений.
Поскольку оценки канала, производимые
в каждом решении эпохи, являются
«шумными», а канал изменяется очень
медленно, оценка
![]() ,
сделанная в одном решении эпохи, может
быть использована для внесения небольших
изменений в существующей оценке.
,
сделанная в одном решении эпохи, может
быть использована для внесения небольших
изменений в существующей оценке.
Приблизительное
представление о дисперсии в оценке
каждой волны
![]() может быть сделано путем продолжения,
предположив, что решения принимаются
правильно. Предполагая, как и прежде,
что условия на входе PN последовательностей
имеют величину a,
это видно из (9.75), так что для каждого
интервала между сигналами в n
примерах дисперсия измерений шума (в
каждой из действительных и мнимых
направлений) является
может быть сделано путем продолжения,
предположив, что решения принимаются
правильно. Предполагая, как и прежде,
что условия на входе PN последовательностей
имеют величину a,
это видно из (9.75), так что для каждого
интервала между сигналами в n
примерах дисперсия измерений шума (в
каждой из действительных и мнимых
направлений) является
![]() .
Существуют приблизительные интервалы
между сигналами
.
Существуют приблизительные интервалы
между сигналами
![]() в интервале времени согласования, и мы
можем аппроксимировать оценку
в интервале времени согласования, и мы
можем аппроксимировать оценку
![]() как среднее из этих измерений. Это
снижает «шум» измерений на коэффициент
,
сокращая дисперсию ошибки измерений
до
как среднее из этих измерений. Это
снижает «шум» измерений на коэффициент
,
сокращая дисперсию ошибки измерений
до
![]() .
.
Однако
есть очевидный вопрос это влияние
ошибочных решений. Каждое ошибочное
решение порождает "оценку" каждой
![]() ,
независимой от истинной
.
Очевидно, что слишком много ошибочных
решений будут ухудшать оценочное
значение каждой
,
которая в свою очередь будет способствовать
дальнейшему ухудшению ошибочных решений
до тех пор пока оценки и решения не
станут ложными. Таким образом, rake
приемник требует первоначальной хорошей
оценки каждой
,
а также требуется некоторый механизм
для восстановления после «катастрофы»,
указанной выше.
,
независимой от истинной
.
Очевидно, что слишком много ошибочных
решений будут ухудшать оценочное
значение каждой
,
которая в свою очередь будет способствовать
дальнейшему ухудшению ошибочных решений
до тех пор пока оценки и решения не
станут ложными. Таким образом, rake
приемник требует первоначальной хорошей
оценки каждой
,
а также требуется некоторый механизм
для восстановления после «катастрофы»,
указанной выше.
Rake приемники часто используются с большими алфавитами входных последовательностей PN, и анализируют такие не двоичные системы также, как в случае двоичных систем указанном выше. Например, мобильный стандарт IS95, который будет обсуждаться позже, использует методы распространения спектра с полосой пропускания от 1,25 MH. В этой системе набор сигналов, состоящий из 64 ортогональных форм сигнала, используется 64-битный rake приемник. В этом примере, однако, rake приемник использует некогерентные методы.
Как правило, в rake системах PN последовательности выбраны так, чтобы быть взаимно ортогональными, но в этом нет серьезной необходимости. Пока каждый сигнал представляет собой PN последовательность с соответствующими автокорреляционными свойствами, оценка канала будет работать также, как и прежде. Конечно, элемент решения для данных должен быть спроектирован для определенной структуры сигнала. Например, мы даже можем использовать двоичные диаметрально противоположные сигналы, учитывая некоторые процедуры обнаружения, если инвертировать оценки канала.