

4.5Структура устройств ти
В телеизмерительных устройствах время-импульсной системы параметром сигнала, несущим информацию при передаче по каналу связи, является длительность импульса или интервал между фронтами импульсов.
Соответственно, основной блок установленного на контролируемом пункте КП (рис. 4.5.1) передающего устройства - это преобразователь измеряемой величины X во временной интервал τ, а основной блок установленного на пункте управления (ПУ) приемного устройства — это преобразователь τ в непрерывную электрическую величину (напряжение U, ток I) или в цифровой код N. В зависимости от вида приемного преобразователя, следом за ним включается аналоговый прибор АП пли цифровой прибор ЦП.
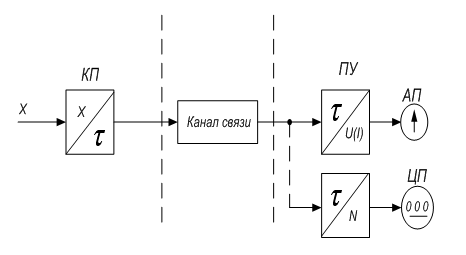
рис. 4.5.1. Структура телеизмерительного устройства время-импульсной системы
Канал связи, показанный на рис. 4.5.1, это не всегда выделенная пара проводов. В более общем случае это одни из множества каналов, образованных по одной паре проводов путем вторичной модуляции несущих колебаний с различными частотами. При этом в системе имеет место повторная модуляция.
Система, показанная на рис. 4.5.1, является одноканальной. Многоканальную систему можно построить, применив либо частотное, либо временное разделение каналов. Частотное разделение выполняется обычно в каналообразующей аппаратуре. При этом собственно телеизмерительная аппаратура представляет собой простую сумму одноканальных устройств.
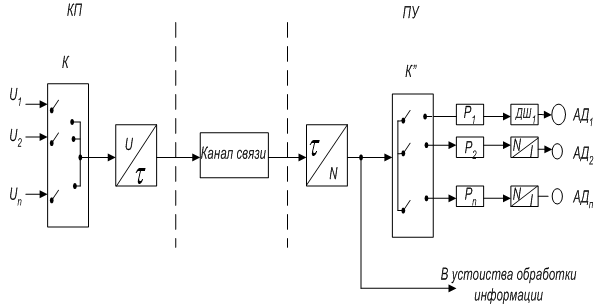
рис. 4.5.2. Пример структуры многоканального время-импульсного устройства
Временное разделение каналов выполняется в самих телеизмерительных устройствах с помощью двух автоматически синхронизируемых коммутаторов. Пример структуры такого устройства показан на рис. 4.5.2. Здесь на приемной стороне применен цифровой преобразователь τ в цифровой код N, так что в отличие от коммутатора передатчика К, переключающего аналоговые сигналы датчиков U1...U2, коммутатор приемника К" переключает кодовые сигналы, подавая их по очереди на регистры Р1 – Рп, запоминающие коды по каждому каналу.
В устройстве имеются два вида воспроизведения: цифровое и аналоговое. Для управления цифровым прибором нужен единично-десятичный код. Он невыгоден для запоминания и передачи, поэтому на промежуточных этапах используется более экономный код, например двоично-десятичный, а перед цифровым прибором устанавливается дешифратор ДШ. Для аналогового воспроизведения используются индивидуальные преобразователи цифрового кода в ток.
4.6Динамический диапазон и точность демодуляции шим-ам сигналов
При разработке демодулирующих устройств в системах с ШИМ прежде всего следует выбрать метод демодуляции - непосредственная фильтрация ШИМ-сигналов посредством ФНЧ (первый метод), либо преобразование ШИМ – АИМ с последующей фильтрацией или интерполяцией (второй метод). Первый метод обладает очевидным преимуществом – простотой. Таким же очевидным преимуществом второго метода является возможность получения большой амплитуды полезной составляющей при малых глубинах модуляции. Однако второй метод технически более сложен, а следовательно, здесь возможны дополнительные инструментальные погрешности, вызванные, например, нелинейностью преобразования ШИМ – АИМ, погрешностями фиксирующих схем и др.
В показано, что выбор метода демодуляции ШИМ-сигналов зависит от используемой глубины модуляции М, т. е. для многоканальных систем - от количества каналов, размещаемых при временном разделении в канале связи. Если имеется возможность использовать сигнал ШИМ с максимальной глубиной модуляции М→1, то наиболее целесообразным оказывается первый метод модуляции. В этом случае при простоте технической реализации появляется возможность получения максимальной амплитуды ПС без каких-либо дополнительных преобразований.
В области малых глубин модуляции М (0,1—0,01) наиболее целесообразно применение второго метода со ступенчатой интерполяцией и последующей фильтрацией фильтром не ниже третьего порядка. Тогда обеспечивается максимальная амплитуда полезного сигнала (вне зависимости от значения М) и достигается большая, чем по первому методу, точность демодуляции (по второму методу точность порядка 1 % достигается при коэффициенте следования μ ≈ 9 ÷ 10). Практическая непригодность первого метода в данном случае объясняется малым уровнем полезного сигнала после фильтра и меньшей точностью, так как ошибка σε ⁄ σх с уменьшением М, как показано выше, увеличивается.
Для практического определений параметров импульсных сигналов и оценки точности демодуляции при первом методе можно использовать результаты теоретического и экспериментального исследования статистической точности демодуляции. Экспериментально установлено, что зависимости относительных ошибок σх = f(μ) в случае фильтрации ШИМ‑сигналов приближенно аппроксимируются зависимостями σ0 ⁄ σх = f(μ), где σ20 — мощность помехи на выходе фильтра при поступлении на его вход немодулированной последовательности импульсов. Таким образом, дисперсия ошибки σ2м, вызванной модуляционной помехой ШИМ-сигнала, примерно равна мощности помехи, вызванной немодулированной последовательностью импульсов, независимо от вида энергетического спектра входного сигнала, его дисперсии, вида закона распределения вероятности и типа фильтра. Условия, необходимые для выполнения указанного соотношения, состоят в том, чтобы ФНЧ не давал значительных искажений полезной составляющей ШИМ-сигнала, а порядок фильтра не превышал N = 6.
Считая, что мощность сигнала помехи на выходе ФНЧ при немодулированной последовательности импульсов σ20 определяется в основном первой гармоникой тактовой частоты, получим следующие приближенные соотношения для составляющей ошибки демодуляции δм.
При
![]()

При
![]()
Где
![]() − модуль
передаточной функции ФНЧ на тактовой
− модуль
передаточной функции ФНЧ на тактовой
частоте
![]() ;
;
σ − среднеквадратическое значение ПМС.