

Лекция 5.
5.2 Уравнения движения ла в скалярной форме
В практических исследованиях векторные уравнения (5.2), (5.3) заменяют эквивалентной системой дифференциальных уравнений в проекциях на выбранные (обычно связанные с центром масс ЦМ ЛА) системы координат.
Будем считать,
что путем параллельного переноса силы
приложены в ЦМ ЛА. Если вектор силы
направлен от нас, обозначим
![]() ,
а в случае - к нам будем обозначать .
,
а в случае - к нам будем обозначать .
Рассмотрим схему действующих сил для 3-х видов ЛА (рис.21).
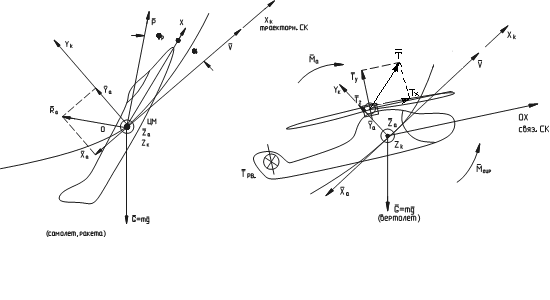
Рис. 21
р – угол установки двигателя, угол поворота по отношению к связанной СК |
|
Уравнения движения ЦМ самолетов и ракет и их вращательное движение в инерциальной системе отсчета в векторной форме (5.2),(5.3) c учетом действующих сил и моментов запишем в виде:
![]() m
m![]() ;
(уравнение сил) (5.4)
;
(уравнение сил) (5.4)
![]() .
(уравнение моментов) (5.5)
.
(уравнение моментов) (5.5)
Если система
отсчета неинерциальная, то добавляются
кориолисовы и переносные силы инерции.
Для большинства ЛА
![]() и
и
![]() -
малы. Индекс “0” в выражениях для
и
здесь и в дальнейшем будет опускаться.
-
малы. Индекс “0” в выражениях для
и
здесь и в дальнейшем будет опускаться.
![]() ,
т.к. обычно выбранные системы координат
располагаются в ЦМ ЛА.
,
т.к. обычно выбранные системы координат
располагаются в ЦМ ЛА.
Уравнения движения вертолета
m
![]() ;
;
(уравнение сил) (5.6)
![]() .
.
(уравнение моментов) (5.7)
Наиболее простую
форму система уравнений движения ЦМ
самолетов и ракет примет, если (5.4)
спроецировать на оси траекторной
системы координат![]() .Получим
уравнения движения относительно
сферической невращающейся Земли при
отсутствии ветра ([1], стр.29).
.Получим
уравнения движения относительно
сферической невращающейся Земли при
отсутствии ветра ([1], стр.29).
![]() ; (5.8)
; (5.8)
![]() ; (5.9)
; (5.9)
![]() (5.10)
(5.10)
Составляющие
![]() ;
;
![]()
представляют собой центробежные
силы инерции, обусловленные кривизной
земной поверхности. Здесь
![]() - угол местной широты. Если Землю считать
плоской т.е.
- угол местной широты. Если Землю считать
плоской т.е.![]() ,то
этими составляющими пренебрегают.
Ускорение, обусловленное кривизной
Земли при скорости ЛА около 1000
,то
этими составляющими пренебрегают.
Ускорение, обусловленное кривизной
Земли при скорости ЛА около 1000![]() достигает 1,6
достигает 1,6![]() от g(H).
Для ЛА, у которых скорость
от g(H).
Для ЛА, у которых скорость
![]() кривизна Земли обычно не учитывается,
или учитывается в виде поправок в
конечные результаты расчетов.
кривизна Земли обычно не учитывается,
или учитывается в виде поправок в
конечные результаты расчетов.
В уравнения (5.8) – (5.10) входит масса самолета или ракеты, которая меняется с течением времени из-за выгорания топлива, поэтому рассматривается дополнительное дифференциальное уравнение для учета изменения массы ЛА.
![]() (5.11)
(5.11)
где ![]() – секундный массовый расход топлива;
– секундный массовый расход топлива;
![]() – степень дросселирования тяги
двигателя.
– степень дросселирования тяги
двигателя.
Проецирование векторных уравнений на выбранные СК удобно производить с помощью таблиц (матриц) направляющих косинусов между различными СК [1], [2] и использовать матричные преобразования (см.Приложение 1,таблица 1,2.).
Тот же результат можно получить, если использовать «теорию бесконечно малых величин» для описания изменения параметров траектории.
Например: (Земля принимается плоской) (рис. 22).
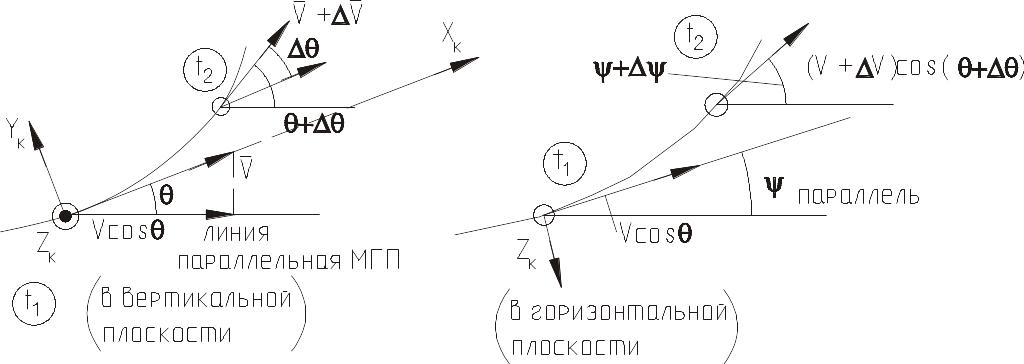
Рис. 22
Здесь t2=t1+t,
OXk совпадает с
.
Поэтому проекция ускорения
![]() на OXk
будет равна:
на OXk
будет равна:
![]()
Проекция на OYk:
![]() .
.
Проекция на OZk:
![]()
У нас
![]() .
Аналогично можно вывести проекции сил
и ускорений, обусловленных кривизной
Земли.
.
Аналогично можно вывести проекции сил
и ускорений, обусловленных кривизной
Земли.
Рассмотрим уравнения моментов в скалярной форме при проектировании (5.5) на оси связанной СК, ориентированных вдоль главных осей инерции самолета (ракеты), для которых центробежные моменты инерции нулевые (Ixz=Iyz=0), а значения Ixy - малы. Из курса теоретической механики известно, что уравнения вращательного движения ЛА в проекциях (5.5) на OXYZ запишутся в виде [1], [2]
![]() ;
(5.12)
;
(5.12)
![]() ;
(5.13)
;
(5.13)
![]() ,
(5.14)
,
(5.14)
где:
![]() – проекции вектора угловой скорости
– проекции вектора угловой скорости
![]() вращения ЛА на главные центральные оси
инерции;
вращения ЛА на главные центральные оси
инерции;
Mx, My, Mz – сумма проекций моментов сил, входящих в правую часть (5.5), соответственно на оси OX, OY, OZ;
Ix, Iy, Iz – главные центральные моменты инерции ЛА, являющиеся функциями массы: Ix(m), Iy(m), Iz(m).
Уравнения движения центра масс (5.6) вертолета часто используют в проекциях на связанные оси координат OXYZ в следующей форме ([2], стр.40):
![]() ;
(5.15)
;
(5.15)
![]() ;
(5.16)
;
(5.16)
![]() .
(5.17)
.
(5.17)
Здесь Vx,
Vy,
Vz,
![]() – проекции векторов линейной и
угловой скорости
и
соответственно на оси OX,
OY, OZ; X,
Y, Z
– проекции сил, входящих в правую часть
(5.6), соответственно на оси OX,
OY и OZ.
– проекции векторов линейной и
угловой скорости
и
соответственно на оси OX,
OY, OZ; X,
Y, Z
– проекции сил, входящих в правую часть
(5.6), соответственно на оси OX,
OY и OZ.
Уравнения вращательного движения вертолета в проекциях на оси связанной СК имеют вид (5.12) – (5.14), в которых Mx, My, Mz определяются как сумма проекций моментов, входящих в правую часть (5.7), соответственно на оси OX, OY и OZ.
Отметим, что если для вертолета или любого другого ЛА значение центробежного момента инерции Ixy является существенной величиной, то можно использовать уравнения в форме (1.57) [1] стр.33.
Обычно в математической модели движения вертолета к системам уравнений (5.12) – (5.14) добавляют уравнение равновесия моментов относительно вала несущего винта
![]() ,
(5.18)
,
(5.18)
где Myв
– суммарный крутящий момент,
обусловленный несущими винтами
вертолёта, и момента, создаваемого
силовой установкой; Iyв-
приведённый момент инерции вращающихся
элементов относительно вала несущего
винта;
![]() -
угловая скорость вращения винта.
-
угловая скорость вращения винта.