

7.2. Реле непосредственного действия
Реле переменного тока непосредственного действия по сравнению с реле постоянного тока имеют две особенности. Во-первых, для уменьшения потерь на вихревые токи и перемагничивание, магнитопровод выполняют из листовой стали с высоким удельным электрическим сопротивлением. Поэтому магнитопровод имеет обычно квадратное или прямоугольное сечение. Во-вторых, у реле переменного тока существует вибрация якоря, так как магнитный поток и тяговое усилие периодически становятся равными нулю, и реле "стремится" отпустить якорь.
Для построения тяговой характеристики реле переменного тока используем формулу (4.16). Пренебрегая падением МДС в стали, будем считать Іwв = Іw =iw. Тогда
Поскольку у реле R<<ωL, то z ≈ ωL. Применяя формулы (5.1) и (4.3), получим
 (7.1)
(7.1)
Подставив выражение (7.1) в (4.16), получим
 (7.2)
(7.2)
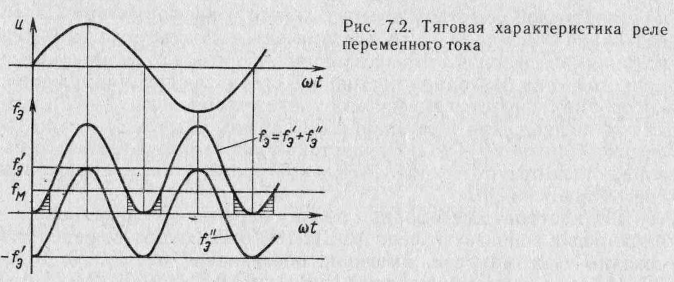
Из уравнения (7.2) следует, что в отличие от реле постоянного тока тяговое усилие у реле переменного тока является функцией времени и не зависит от воздушного зазора δ. Сила fэ имеет постоянную составляющую fэ΄=Um2/(4w2ω2μ0S) и переменную fэ΄΄= - fэ΄cos2ωt, которая изменяется с двойной частотой по сравнению с частотой питающего напряжения.
Тяговая характеристика построена как график функции (7.2) (рис. 7.2). Сила fэ всегда положительна, но периодически становится равной нулю при и = 0. Если fм — минимальное усилие, необходимое для удержания якоря в притянутом положении, то в моменты времени (заштрихованные области), когда fэ < fэ, якорь будет отпущен. Вибрация якоря приводит к преждевременному механическому износу осей его крепления и нарушает надежность замыкания контактов.
Для борьбы с вибрацией якорь делают тяжелым, массивным относительно всей конструкции реле. В результате момент инерции якоря возрастает, реле не успевает отпустить якорь за время, когда fэ < fэ . Это, однако, увеличивает МДС притяжения реле и не устраняет причину вибрации. Причину можно устранить, если создать в магнитной цепи реле два потока со сдвигом по фазе. Они создают два тяговых усилия fэ1и fэ 2 со сдвигом по фазе φ (рис. 7.3, а) такие, что суммарное усилие fэ = fэ1+ fэ 2 всегда больше fм. Причем, fэ1+ fэ 2 = max при φ=90о.
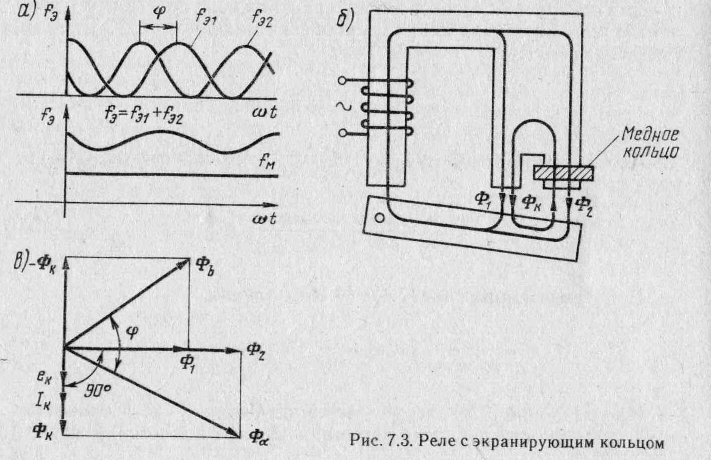
Два магнитных потока со сдвигом по фазе получают в результате экранирования части сердечника медным кольцом (рис. 7.3, б) или короткозамкнутой обмоткой. Поток электромагнита расщепляется на две части Ф1, и Ф2. Переменный поток Ф2 наводит в медном кольце ЭДС ек и ток iк. Магнитный поток Фк тока iк препятствует изменению потока Ф2. Если, например, поток Ф2 в данный момент времени возрастает, то поток Фк направлен навстречу ему, но совпадает по направлению с потоком Ф1. Как следует из векторной диаграммы (рис. 7.3, в), суммарный поток под неэкранированной частью сердечника Фь опережает суммарный поток под экранированной частью сердечника Фа на угол φ. При построении векторной диаграммы предполагается, что векторы Фк и Iк совпадает по фазе с вектором ек (пренебрегая индуктивностью медного кольца), который отстает от вектора Ф2 на 90°. Такой способ обеспечивает угол φ = 50 80°.