

Глава 4. Электромагнитные нейтральные реле постоянного ток а
4.1. Механическая характеристика реле
Работу реле определяют две характеристики - механическая и тяговая. Рассмотрим механическую характеристику на примере реле НМШ (рис. 4.1). Основными частями этого реле являются: обмотка 10, сердечник 7, ярмо 1, якорь 6, груз 9 для возвращения якоря в отпущенное положение, антимагнитный штифт 8 высотой δ0, контактная тяга 4 с верхним 3 и нижним 2 штифтами, контактная система 5. Когда якорь реле отпущен, воздушный зазор равен δ, а когда притянут, то δ0.
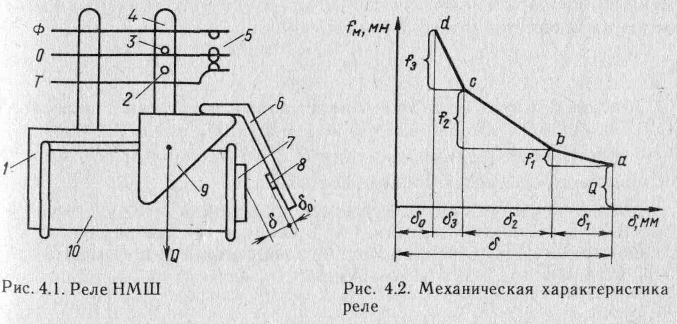
Механической характеристикой реле называется зависимость механических усилий, преодолеваемых при перемещении якоря, от значения хода якоря: fм = φ(δ).
Притяжению якоря препятствуют масса якоря и груза Q, сопротивление упругих контактных пружин и силы трения. Механическая характеристика реле НМШ (рис. 4.2) имеет вид ломаной линии abcd и может быть построена экспериментально или в результате расчета.
В исходном положении, когда якорь реле отпущен, под действием силы Q (см. рис. 4.1) верхний штифт 3 контактной тяги давит сверху вниз на пружину О и изгибает ее, чем создается контактное нажатие на тыловом контакте. Точка а (см. рис. 4.2) соответствует началу движения якоря. При этом воздушный зазор равен 6, и требуется приложить к якорю силу Q. Участок ав характеристики соответствует первому этапу движения якоря, когда контактная тяга 4 (см. рис. 4.1) поднимается вверх и выпрямляется пружина О. Для этого требуется приложить силу f1 (см. рис. 4.2) и якорь перемещается на расстояние δ1. Затем нижний штифт 2 (см. рис. 4.1 ) подхватывает снизу пружину О и перемещает ее вверх до замыкания фронтового контакта. Этому соответствует участок bс (см. рис. 4.2). Участок cd соответствует совместному изгибу вверх пружин О и Ф, чем обеспечивается контактное нажатие на фронтовом контакте.
Механическая характеристика необходима для расчета параметров электромагнита реле. Тяговое усилие fэ, развиваемое электромагнитом, должло быть больше силы fм, препятствующей притяжению якоря, при всех значениях δ. Это условие срабатывания реле:
fэ > fм. (4.1)
4.2. Особенности магнитной цепи реле
Обозначим через Фв магнитный поток в воздушном зазоре (рис. 4.3). Его еще называют рабочим потоком, так как он непосредственно создает тяговое усилие. По длине сердечника магнитный поток изменяется из-за наличия потоков утечки Фу, замыкающихся между горизонтальной частью ярма и сердечником. Максимальный поток наблюдается у основания сердечника:
Ф0 = Фв + Фу. (4.2)
Магнитная цепь реле имеет переменный воздушный промежуток. Так как магнитная проводимость воздуха Gв, значительно меньше магнитной проводимости стали Gст, то магнитный поток Фв в основном определяется проводимостью Gв.
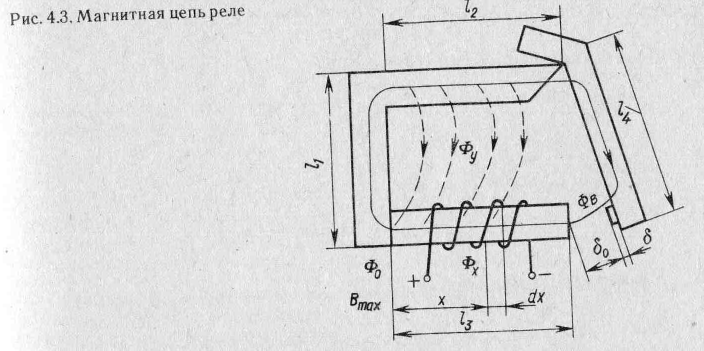
Если отношение площади сечения сердечника S к ходу якоря δ больше 10, то можно считать, что в воздушном зазоре создается равномерное магнитное поле, и с погрешностью, не превышающей 5 %, можно использовать выражение:
Gв = μ0.S/ δ, (4.3)
где μ0 = 4π.10-7 Гн/м - магнитная проницаемость воздуха.
Удельная магнитная проводимость для потоков утечки между круглым сердечником и ярмом

 (4.4)
(4.4)
где а - расстояние между сердечником и ярмом; r - радиус сердечника.
Полный поток утечки для конструкции магнитной цепи с поворотным якорем можно определить, используя экспериментальную формулу, отражающую закон изменения магнитного потока в сердечнике. Тогда поток в сердечнике на расстоянии х от основания
Фх = Ф0 - сх2, (4.5)
где с - постоянная величина.
Продифференцируем выражение (4.5):
dФх = - 2cxdx. (4.6)
Приращение потока утечки на элементарном участке dx на расстоянии х от основания сердечника
dФyх = Iwxgdx, (4.7)
где Iwх - МДС электромагнита для сечения х.
Так как приращение потока утечки равно убыванию основного потока, то dФyх = - dФx, а из выражения (4.6) и (4.7) получаем:
Iwxgdx = 2cxdx или Iwx = 2cx/g. При х = l3Iwx = Iwв = 2cl3/g,
отсюда

 (4.8)
(4.8)
Подставим выражение (4.8) в (4.7):
 (4.9)
(4.9)
Тогда
 (4.10)
(4.10)
Максимальный поток
 (4.11)
(4.11)