

6.3. Управление устройствами
Внешние устройства ЭВМ отличаются большим разнообразием в форматах управляющей информации и в алгоритмах управления. Даже в канальной модели интерфейса разные устройства имеют разные модификации команд чтения/записи/управления, не говоря уже о том, что транзакция на устройстве обычно подразумевает выполнение нескольких команд и последовательности их бывают совершенно различными для разных устройств.
Модули ОС, которые осуществляют трансляцию однотипных для всех устройств обращений к ним из процессов и из других модулей ОС в специфические для устройства управляющие воздействия и управляют выполнением этих воздействий, называются драйверами. (Мы не согласны с теми авторами, которые называют драйверами любые программы управления вводом-выводом, драйверы в нашем понимании обязательно включаются в состав ОС и обязательно соответствуют спецификациям данной ОС.) Каждому типу устройства соответствует свой драйвер. Драйвер устройства имеет два основных уровня, как показано на рис.6.5. Первый (верхний) уровень принимает системные вызовы от процессов и формирует на основании каждого вызова запрос. Этот же уровень выстраивает запросы в очередь и поддерживает упорядоченность этой очереди в соответствии с принятой дисциплиной обслуживания. Второй (нижний) уровень драйвера выбирает из очереди первый запрос и обслуживает его: формирует управляющие воздействия и передает их на устройство, обрабатывает прерывания от устройства и сообщает ядру ОС о наступлении событий, связанных с вводом-выводом.
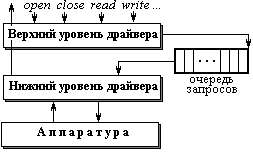
Рисунок 6.5 Структура драйвера
Как мы сказали, верхний уровень драйвера определяет очередность, в которой обслуживаются запросы от разных процессов. Для реализации политики обслуживания драйвер должен учитывать как приоритеты процессов, так и доступность устройств. Приоритетность запросов может оцениваться по разным стратегиям, из которых наиболее распространенной является та, согласно которой запрос процесса, имеющего наивысший процессорный приоритет, имеет наивысший приоритет в очереди драйвера и другие стратегии, ставящие целью повышение эффективности обмена с устройством, пример такой стратегии мы рассматриваем ниже применительно к драйверам дисковых накопителей.
Доступность устройства мы рассмотрим на примере канальной модели подключения. Путь от процессора к устройству включает в себя три "станции": канал, контроллер, устройство. Каждая из станций пути может быть свободна или занята независимо от других. На приведенной на рисунке 6.4 древовидной структуре различные уровни этой структуры характеризуются различным временем своего участия в операции ввода-вывода. Канал участвует только в передаче данных. Например, при выводе канал может быть занятым только на время передачи из памяти в буфер контроллера, после чего канал освобождается и может обслуживать другой контроллер, а первый контроллер тем временем передает данные на устройство. После передачи данных на устройство освобождается контроллер, а устройству может потребоваться еще некоторое время, чтобы обработать полученные данные. Поэтому события освобождения канала, контроллера и устройства индицируются разными признаками в состоянии канала. В наборе команд ввода-вывода есть отдельные команды для проверки состояния устройства, контроллера и канала. Адрес устройства в схеме подключения, подобной той, которая представлена на рисунке 6.4, адрес должен состоять из идентификатора (номера) канала, идентификатора контроллера в канале, идентификатора устройства в контроллере. Процесс обращается к устройству по некоторому своему идентификатору – виртуальному адресу, который может быть подобен реальному, а может представлять собой и логическое имя устройства. В простейшем случае трансляция адреса устройства производится по таблице перекодировки. Хотя, пока в современных системах предпочтение отдается именно древовидной структуре подключения, возможна и более сложная структура, допускающая подключение устройства к нескольким контроллерам, а контроллера – к нескольким каналам. Реальный адрес устройства может формироваться, таким образом, динамически. В IBM System/390 эти функции переданы аппаратной подсистеме ввода-вывода.
Для принятия решений о доступности устройств ОС поддерживает таблицы дескрипторов, отражающие состояние станций пути (три таблицы – по числу типов станций). Для канала дескриптор включает в себя: идентификатор канала; состояние (занят/свободен); список контроллеров, подключенных к каналу; список запросов к каналу. Для контроллера: идентификатор контроллера; состояние; список каналов, к которым подключен контроллер; список устройств, подключенных к контроллеру; список запросов к контроллеру. Для устройства: идентификатор устройства; состояние; список контроллеров, к которым подключено устройство; список запросов к устройству.
Логически являясь частью ОС, драйверы, тем не менее, оформляются как отдельные модули. Поскольку каждый драйвер однозначно связан с устройством определенного типа (а возможно, и данной модификации), то и состав набора драйверов зависит от конфигурации аппаратных средств. Кроме того, обязательно должна быть обеспечена возможность подключения к системе новых внешних устройств без внесения изменений в ОС. При модульности драйверов это достигается простым добавлением нового драйвера к системному программному обеспечению. Драйверы загружаются в память либо при загрузке системы, либо (реже) – динамически, при возникновении потребности в них. Выбор драйверов для загрузки выполняется либо по явным указаниям в процедуре инициализации ОС, либо неявно – по имеющимся таблицам конфигурации системы либо полностью автоматически – путем опроса при загрузке всех установленных устройств, опознания их и подключения соответствующих драйверов.