

4.4 Вимірювання параметрів обертового руху
Швидкість обертання елементів машин, пристроїв та агрегатів є однією з характеристик досліджуваного об'єкта. Нерідко вона визначає динамічні та теплові напруження в машинах. Технічні тахометри повинні забезпечувати похибку вимірювання звичайно не більше ніж 1,5...2 %, а при вимірюванні швидкості обертання в енергетичних установках ця похибка не повинна перевищувати 0,3...0,5%.
Швидкість
обертання визначається кількістю
обертів за хвилину n
(об/хв), що зв'язана з частотою обертання
![]() ,
як
,
як
![]() n
= 60
.
(4.20)
n
= 60
.
(4.20)
Найпоширенішими є такі методи вимірювання частоти обертання: відцентровані механічні, в яких чутливий елемент реагує на відцентрову силу, вимірювання частоти обертання: що розвивається не зрівноваженими масами рухомого вала; електричні постійного, змінного чи імпульсного струму, основані на залежності генерованої напруги від частоти обертання, а для змінного та імпульсного струму - залежність частоти струму від частоти обертання; магнітоіндукційні. основані на залежності наведених в металевому тілі вихрових струмів від частоти обертання; індукційні, основані на законі електромагнітної індукції; фотоелектричні, що базуються на модуляції світлового потоку елементами обертання; стробоскопічні та інші.
П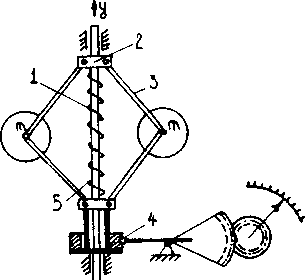 рикладом
відцентрового механічного тахометра
може бути тахометр (рис. 4.9). У даному
тахометрі до осі 1, яка обертається з
частотою
досліджуваного
об'єкта (вала), закріплена муфта
2, що з'єднана з рамкою 3. На шарнірах
у місцях з'єднань
відповідних
кінців сторін
рамки закріплені
інерційні
маси m.
Під дією
відцентрових сил
інерційні
маси розходяться,
переміщуючи вздовж осі у муфту 4 і
стискуючи пружину 5. Переміщення
муфти 4 передається
на відліковий
пристрій.
рикладом
відцентрового механічного тахометра
може бути тахометр (рис. 4.9). У даному
тахометрі до осі 1, яка обертається з
частотою
досліджуваного
об'єкта (вала), закріплена муфта
2, що з'єднана з рамкою 3. На шарнірах
у місцях з'єднань
відповідних
кінців сторін
рамки закріплені
інерційні
маси m.
Під дією
відцентрових сил
інерційні
маси розходяться,
переміщуючи вздовж осі у муфту 4 і
стискуючи пружину 5. Переміщення
муфти 4 передається
на відліковий
пристрій.
З
Рисунок 4.9 –
Відцентровий механічний тахометр.
y=S2x (4.21)
де S - чутливість тахометра, яка визначається його конструкційними параметрами.
Відцентрові тахометри прості та надійні. Вони застосовуються для вимірювань кутових швидкостей включно до 1000 об/хв. їх основними недоліками є недистанційність, порівняно велика похибка (до 10 %), низький поріг чутливості.
Первинними перетворювачами електричних (генераторних) тахометрів є тахогенератори – електричні мікромашини, що працюють в режимі генератора і є перетворювачами швидкості обертання ротора в пропорційний електричний сигнал.
Тахогенератор постійного струму (рис. 4.10) має рухомий ротор 1 з розміщеною на ньому багатосекційною вимірювальною обмоткою 2, кінці яких підведені до колектора 3 зі щітками 4. При обертанні ротора в полі, створюваному постійним магнітом, у вимірювальній обмотці наводиться синусоїдна ЕРС, значення якої пропорційне магнітній індукції в повітряному проміжку, що є синусною функцією кута повороту ротора, та вимірюваній кількості обертів. Випрямлена за допомогою колектора напруга подається на магнітоелектричний вимірювальний прилад.
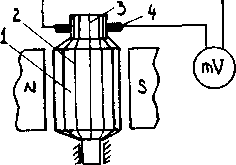
Рисунок 4.10 - Тахогенератор постійного струму.
Тахогенератори постійного струму використовуються для вимірювань швидкості обертання з похибкою до 1...1,5 %. їх основним недоліком є високий рівень шумів, викликаний наявністю рухомого контакту в ланці колектор-щітка, а також пульсації вихідної напруги.
Серед індукційних тахометрів особливе місце займають імпульсні індукційні тахометри. Первинний перетворювач такого тахометра (рис. 4.11, а, б) має вимірювальну обмотку 1, розміщену на сталевому ярмі 2, через яке замикається магнітний потік постійного магніту 3. Рухомою частиною є. феромагнітний зубчастий диск 4. який кріпиться до вала, оберти якого вимірюють.
При обертанні вала зубчастий виступ 5 диска (індуктора), проходячи біля розімкненої частини ярма, зменшує повітряний проміжок між рухомою та нерухомою частинами магнітопроводу, зменшуючи магнітний опір кола магнітного потоку від постійного магніту, що призводить до зміни магнітного потоку і наведення у вимірювальній обмотці ЕРС.
![]() (4.22)
(4.22)
де FM - магніторушійна сила постійного магніту; RM - магнітний опір магнітного кола.
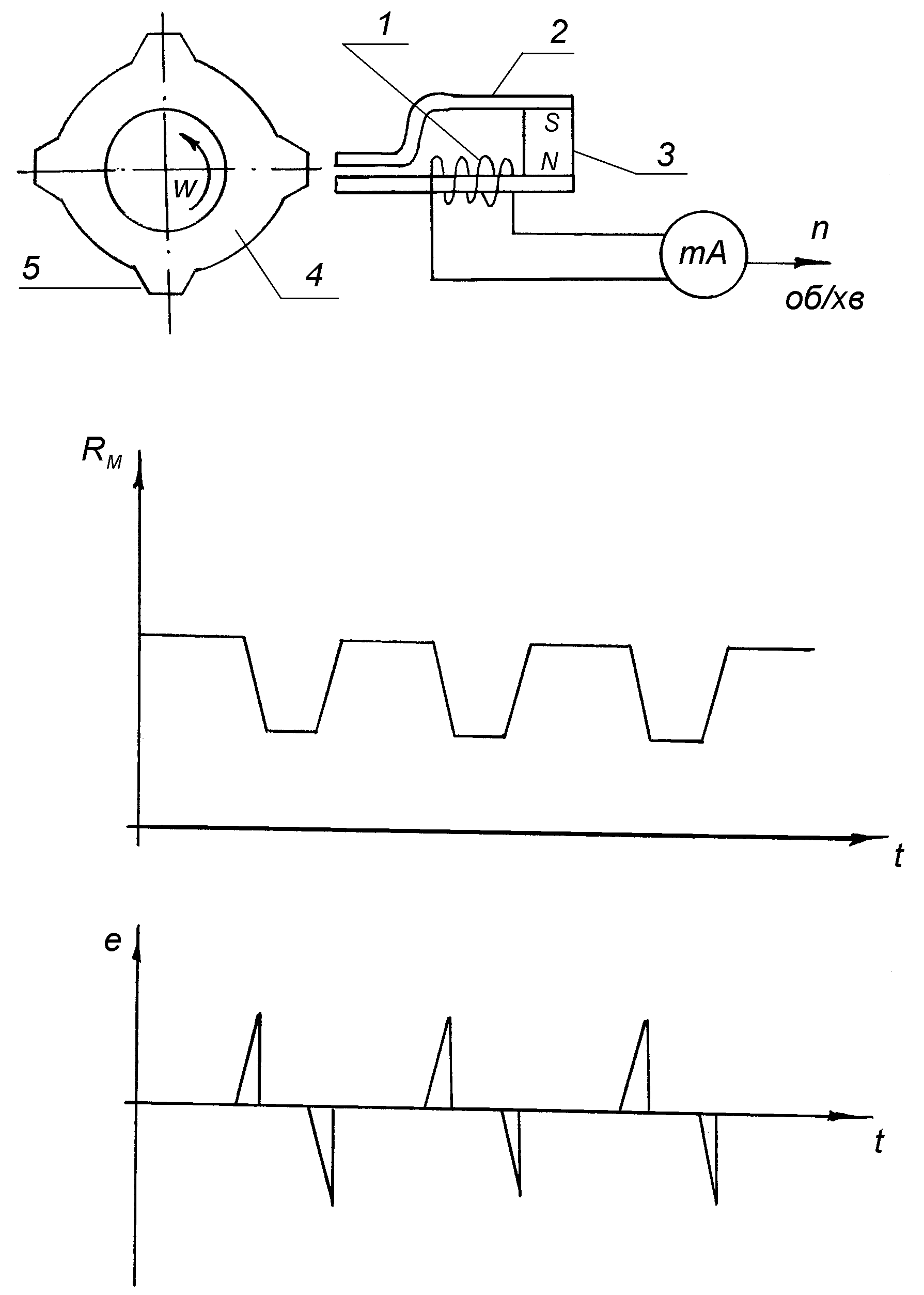
Рисунок 4.11 - Індукційний тахометр.
Для наведеної конструкції імпульсного індукційного перетворювача ЕРС, що виникає у вимірювальній обмотці, буде мати вигляд двополярних імпульсів, частота яких дорівнюватиме частоті проходження виступів диска (зубців) попри розімкнену частину ярма, тобто частоті обертання вала
![]() (4.23)
(4.23)
де р - кількість виступів індуктора частотного інформативного параметра, інформативним параметром вихідного сигналу ; п - частота його обертання, об/хв.
Крім частотного інформативного параметра, інформативним параметром вихідного сигналу може бути і вихідна ЕРС.