

МІНІСТЕРСТВО ОСВІТИ УКРАЇНИ
Національний університет “Львівська політехніка”
Кафедра “Автоматизації
теплових і хімічних процесів”
ДОСЛІДЖЕННЯ СИСТЕМИ ДВОПОЗИЦІЙНОГО РЕГУЛЮВАННЯ
Інструкція
до лабораторної роботи № 5
з дисципліни “Основи автоматики й автоматизації”
для студентів базового напряму 6.092500
“Автоматизація і комп’ютерно-інтегровані технології”
Затверджено на засіданні
кафедри “Автоматизації теплових
і хімічних процесів”
Львів Львівська політехніка 2012 системи двопозиційного регулювання
Мета роботи : практично ознайомитися з роботою систем двопозиційного регулювання і вивчити вплив різних факторів на характер процесу регулювання.
Необхідна теоретична підготовка: знання принципів дії датчиків і приладів з релейним виходом і виконавчих механізмів для двопозиційного регулювання, а також властивостей об’єктів регулювання (швидкість розгону, самовирівнювання, запізнення).
Основні відомості
Процес
регулювання є двопозиційним, якщо
регулюючий орган може знаходитися
тільки в двох положеннях: або він повністю
відкритий, при цьому приплив максимальний
(
![]() ),або
він повністю (частково) закритий, і
приплив мінімальний (
),або
він повністю (частково) закритий, і
приплив мінімальний (![]() ).
).
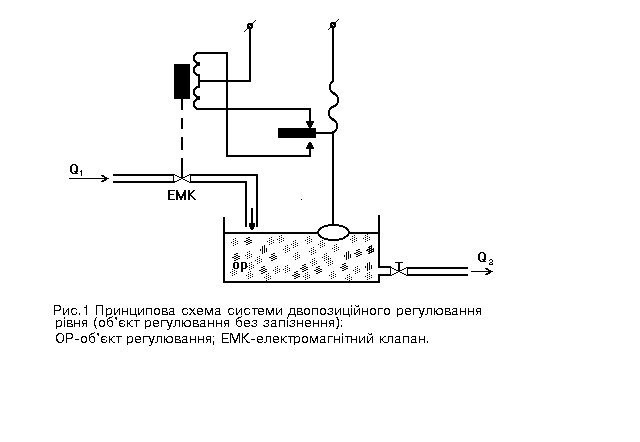
На
рис.1 приведена схема двопозиційного
регулювання рівня. При зростанні рівня
в об’єкті регулювання (ОР) поплавок
замикає верхній контакт, вмикаючи
напругу живлення в обмотку 1 електромагнітного
клапана (ЕМК). Регулюючий орган закривається
і подача рідини в об’єкт зменшується
до значення
. При цьому зменшується рівень рідини
в об’єкті, що призводить до замикання
нижнього контакту і включення напруги
живлення на обмотку 2 ЕМК. В наслідок
цього регулюючий клапан повністю
відкривається, встановлюючи приплив,
рівний
.При двопозиційному регулювання стан
рівноваги в системі не досягається,
оскільки приплив
![]() ніколи не буде рівним витраті
ніколи не буде рівним витраті
![]() :
в момент, коли
:
в момент, коли
![]() регульована
величина Н зростає (так як
регульована
величина Н зростає (так як
![]() );
в другий момент, коли
);
в другий момент, коли
![]() ,
вона зменшується (так як
,
вона зменшується (так як
![]() ).Таким
чином регульована величина Н не
залишається постійною, вона безперервно
коливається, причому амплітуда і частота
цих коливань не повинна виходити за
допустимі межі.
).Таким
чином регульована величина Н не
залишається постійною, вона безперервно
коливається, причому амплітуда і частота
цих коливань не повинна виходити за
допустимі межі.
В якості двопозиційних регуляторів переважно використовують вимірювальні або датчики з релейним виходом ( з одною або двома парами контактів). Наявність двох пар контактів дозволяє встановлювати необхідну зону нечутливості регулятора1.
В порівнянні з іншими видами регулювання двопозиційне має ряд переваг (простота конструкції, настроювання та інші).
В наш час системи двопозиційного регулювання широко застосовують для інерційних об’єктів регулювання, коли допускається коливний процес, а також в випадках багатоканального регулювання, коли один пристрій(машина централізованого контролю і регулювання) по черзі контролює параметри в різних об’єктах і діє на відповідні регулюючі органи.

Рис.2 Хід процесів двопозиційного регулювання в об’єкті без запізнення і самовирівнювання
Хід процесів регулювання на об’єктах без запізнення
На рис.2 показаний характер процесу двопозиційного регулювання на об’єкті без запізнення і без самовирівнювання. При цьому прийнято, що регулятор - без інерційний, а швидкість переміщення регулюючого органа (швидкість зміни )-дуже велика.
В
регулюючому пристрої встановлена зона
нечутливості, рівна
![]() .
.
На
верхньому графіку показані зміни величин
![]() і
і
![]()
![]() в часі, а на нижньому-відповідні їм
відхилення регульованої величини від
заданого (середнього) значення.
в часі, а на нижньому-відповідні їм
відхилення регульованої величини від
заданого (середнього) значення.
Спостереження
починаємо, коли регульована величина
рівна заданому значенню (
![]() )2,
а регульована дія максимальна (
). Так як
,
то регульована величина
)2,
а регульована дія максимальна (
). Так як
,
то регульована величина![]() зростає з швидкістю, пропорційною
збуренню
зростає з швидкістю, пропорційною
збуренню
![]() .
.
![]() , (1)
, (1)
де
![]() -
швидкість розгону об’єкту, що характеризує
інерційність об’єкту.
-
швидкість розгону об’єкту, що характеризує
інерційність об’єкту.
Коли
відхилення регулюючої величини досягає
верхньої межі зони нечутливості(![]() ),
замикається максимальний контакт
регулюючого пристрою, і регулюючий
орган переходить в своє друге фіксоване
положення, встановлюючи притік
,рівний
.Тепер вже
),
замикається максимальний контакт
регулюючого пристрою, і регулюючий
орган переходить в своє друге фіксоване
положення, встановлюючи притік
,рівний
.Тепер вже
![]() , тому регульована величина починає
зменшуватися з швидкістю
, тому регульована величина починає
зменшуватися з швидкістю
![]() , (2)
, (2)
В
момент, коли
досягає нижньої межі зони нечутливості
(![]() ),
замикається мінімальний контакт і
регулюючий орган встановлює
),
замикається мінімальний контакт і
регулюючий орган встановлює
![]() , і регульована величина знову починає
зростати у відповідності з рівнянням
(1) до значення
,
при якому регулятор змінить
до значення
.
, і регульована величина знову починає
зростати у відповідності з рівнянням
(1) до значення
,
при якому регулятор змінить
до значення
.
Як
бачимо, в об’єктах без запізнення процес
двопозиційного регулювання проходить
так, що регульована величина коливається
в межах встановленої зони нечутливості.
Період цих коливань![]() складається з двох відрізків часу: час
включення
складається з двох відрізків часу: час
включення
![]() , коли
, коли
![]() і часу виключення
і часу виключення
![]() ,коли
,коли
![]()
З
графіка
![]() (рис.2) отримаємо:
(рис.2) отримаємо:
![]()
![]() (3)
(3)
Звідси, враховуючи (1), (2), знайдемо
![]() ; (4)
; (4)
![]() ; (5)
; (5)
![]() . (6)
. (6)
Як
видно, період коливань регульованої
величини при двопозиційному регулюванні
об’єктів без запізнення тим менший,
чим більша швидкість розгону об’єкта
,
тобто чим менша інерційність об’єкта.
Слід відмітити, що абсолютне значення
швидкості зміни регульованої величини
(нахил лінії
на рис.2) залежить від навантаження
об’єкту
. Чим менше
, тим більша величина
![]() і менша величина
і менша величина
![]() і навпаки. Тільки для
і навпаки. Тільки для
![]() маємо
=
.
Це випливає з формул (1), (2).
маємо
=
.
Це випливає з формул (1), (2).
Якщо об’єкт без запізнення має самовирівнювання, то в процесі двопозиційного регулювання величина змінюється не по прямій, а по експоненті (рис.3). Амплітуда коливань при цьому не міняється, а період буде більшим. Але при невеликій ширині зони нечутливості розбіжність між прямолінійними і експоненціальними змінами невеликі, тому залежність (6) залишається правильною і для об’єктів з незначним самовирівнюванням.
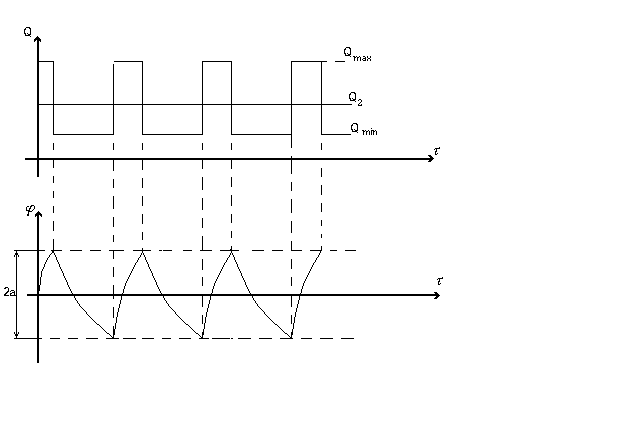
Рис.3. Хід процесу двопозиційного регулювання в об’єкті без запізнення при наявності самовирівнювання.