

2.8.1. Составляется схема соединения добавочных резисторов.
Для первой ступени
Rд.1
используем
один ящик резисторов КФ
№50162
соединение всех ступеней последовательное.

Rд.1 =0,51 Ом
Для второй ступени Rд.2 используем один ящик резисторов КФ №50174 соединение трех ступеней последовательное.
![]()
Rд.2=0,17 Ом
3. Выбор схемы автоматического управления и защиты
электродвигателя.
3.1 По заданным условиям определяется схема управления электродвигателем:
2 – пуск двигателя в функции времени;
4 – торможение противовключением;
7 – питание схемы управления переменным током;
8 – схема управления должна включать автоматическую магнитную
станцию.
3.2 Составляется схема управления и защиты асинхронного электродвигателя с фазным ротором Рис.1.
Для составления схемы управления электроприводом рабочей машины и защиты электродвигателя, необходимо выбрать элементы управления, понижающий трансформатор для обеспечения питания катушек пускателей и контакторов. Технические данные выбранного оборудования и элементов схемы приведены в спецификации Таблица №4.
Таблица №4.
|
Обозначение на схеме |
Наименование |
Тип |
Количество (шт.) |
|
QF |
Автоматический выключатель |
ВА51-31-3; Iн=80 А; Uн=500 В |
1 |
|
FU |
Предохранитель |
ПНБ-2; Iн=6А; U=500 В |
2 |
|
Т |
Трансформатор понижающий |
ОСБ-2; U=380/110В |
1 |
|
КК |
Реле тепловое |
ТРВ |
1 |
|
YB |
Электромагнит механического торможения |
|
1 |
|
КМ, КМ1 |
Контактор переменного тока |
ПА-422 |
2 |
|
КМ2;КМ3;КМ4 |
Контактор |
КВТ-32 |
3 |
|
КV |
Реле напряжения |
РН-53 |
1 |
|
SB1,SB2 |
Кнопки управления |
КУ |
2 |
|
КТ1, КТ2 |
Реле времени |
РВ-100 |
2 |
|
VD |
Выпрямитель |
КЦ-402А |
1 |
|
М |
Асинхронный двигатель с фазным ротором |
MTF412-6 |
1 |
|
Rд1,Rд2 |
Ящики резисторов |
КФ 50174, КФ 50162 |
3 3 |
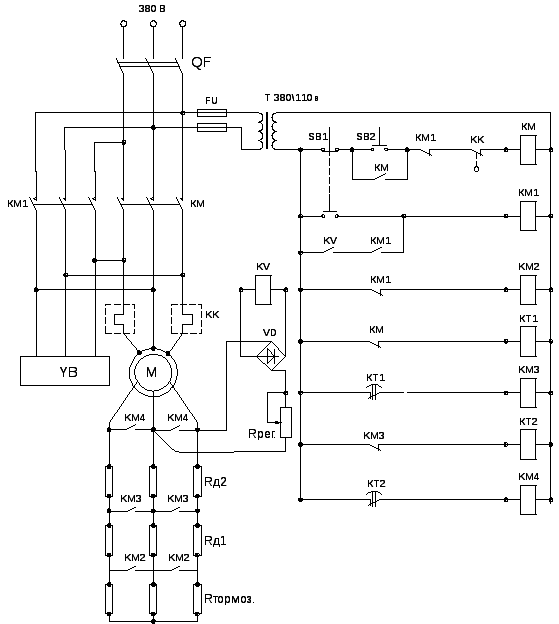
Рис.1 Схема управления и защиты асинхронного электродвигателя
с фазным ротором.
4. Заключение.
Основным средством электрификации и автоматизации технологичес- ких процессов, создания высокопроизводительных машин, механизмов и технологических комплексов является электрический привод.
К основным направлениям развития современного ЭП относятся:
разработка и выпуск комплектных регулируемых ЭП с использованием современных преобразователей и микропроцессорного управления;
повышение эксплуатационной надежности, унификации и улучшение энергетических показателей ЭП;
расширение области применения регулируемого асинхронного ЭП и использования ЭП с новыми типами двигателей – линейными, шаговыми, вентильными, вибрационными, повышенного быстродействия, магнитогидро-
динамическими и т.д.;
развитие научно-исследовательских работ по созданию математических моделей и алгоритмов технологических процессов, машинных средств про-
ектирования ЭП;
подготовка инженерно-технических и научных кадров, способных проектировать, создавать и эксплуатировать современный автоматизирован-
ный ЭП.
Решение этих и ряда других проблем позволит существенно улучшить технико-экономические характеристики ЭП и создать тем самым базу для
дальнейшего технического прогресса промышленного производства (Л-2)с.13.