

4. Равновесие пространственной системы сил
Всякая произвольная пространственная система сил может быть заменена эквивалентной ей по силовому воздействию системой, состоящей из силы, равной главному вектору системы сил, приложенного в произвольно выбранном центре приведения, и пары сил с моментом, равным главному моменту системы относительно того же центра приведения.
![]() ,
,
![]() ,
,
где О
– центр приведения, принятый за начало
декартовой системы координат;
![]() произвольным
образом ориентированная в пространстве
система сил, приложенных к телу.
произвольным
образом ориентированная в пространстве
система сил, приложенных к телу.
Поскольку главный вектор для пары равен нулю, а главный момент сил, составляющих пару, равен моменту пары, то момент пары исчерпывающим образом представляет действие пары на тело.
Условия равновесия произвольной пространственной системы сил
Для равновесия произвольной системы сил, приложенной к твердому телу, необходимо и достаточно, чтобы главный вектор системы сил и главный момент системы сил были равны нулю относительно любого центра приведения, т.е.
![]() = 0,
= 0,
![]() = 0. Эти условия равновесия называются
векторными. Подчеркнем, что центр
приведения
= 0. Эти условия равновесия называются
векторными. Подчеркнем, что центр
приведения
![]() может быть выбран любым.
может быть выбран любым.
Проецируя на оси координат векторные условия равновесия, получаем шесть уравнений равновесия произвольной пространственной системы сил:
![]()
![]()
![]()
![]()
![]()
![]()
Первые три уравнения являются уравнениями для компонент сил, остальные – уравнениями моментов (при их записи использовано определение момента вектора относительно оси).
Таким образом, для равновесия произвольной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы компонентов приложенных сил относительно осей декартовых координат были равны нулю и чтобы суммы моментов приложенных сил относительно каждой из осей координат были также равны нулю.
Расчетная работа №4 Равновесие пространственной системы сил
Определить реакции в точках закрепления твердого тела. Схемы конструкций представлены на рис.4.1, исходные данные - в табл. 4.14.4 . Конкретно задача сформулирована в соответствии с номером рисунка схемы.
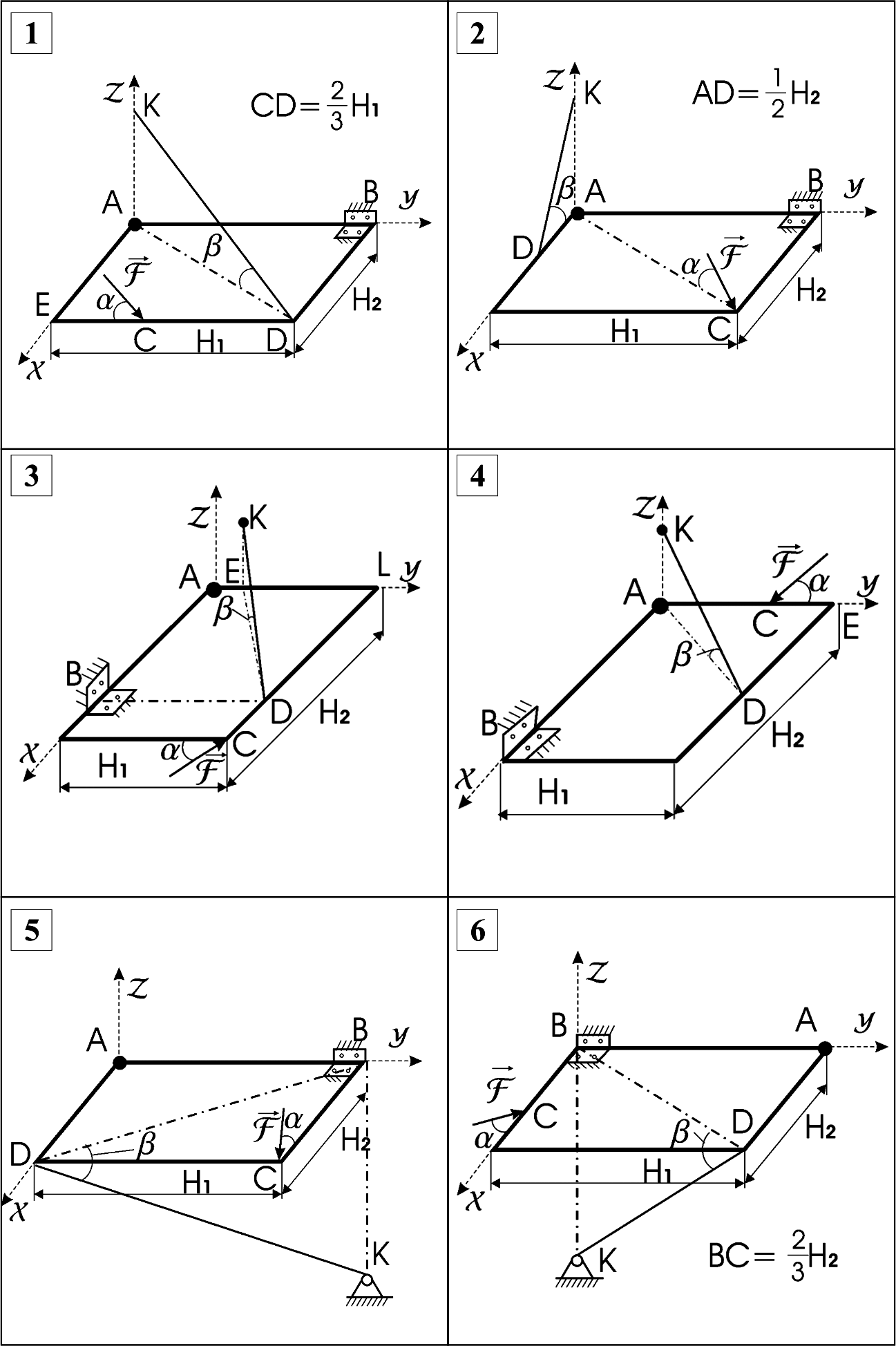
Рис. 4.1. Схемы конструкций к расчетной работе № 4.
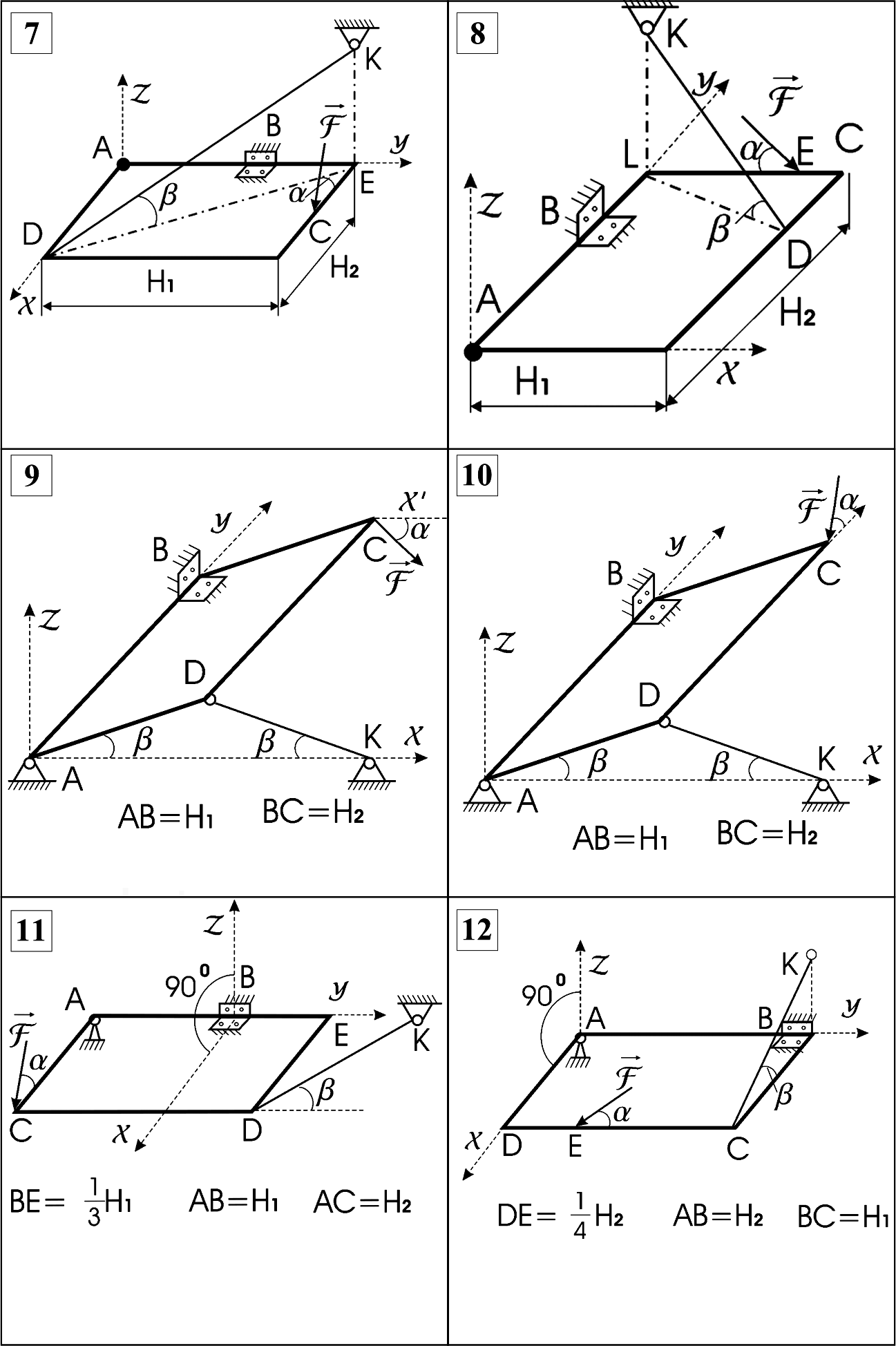
Рис. 4.1 (продолжение)
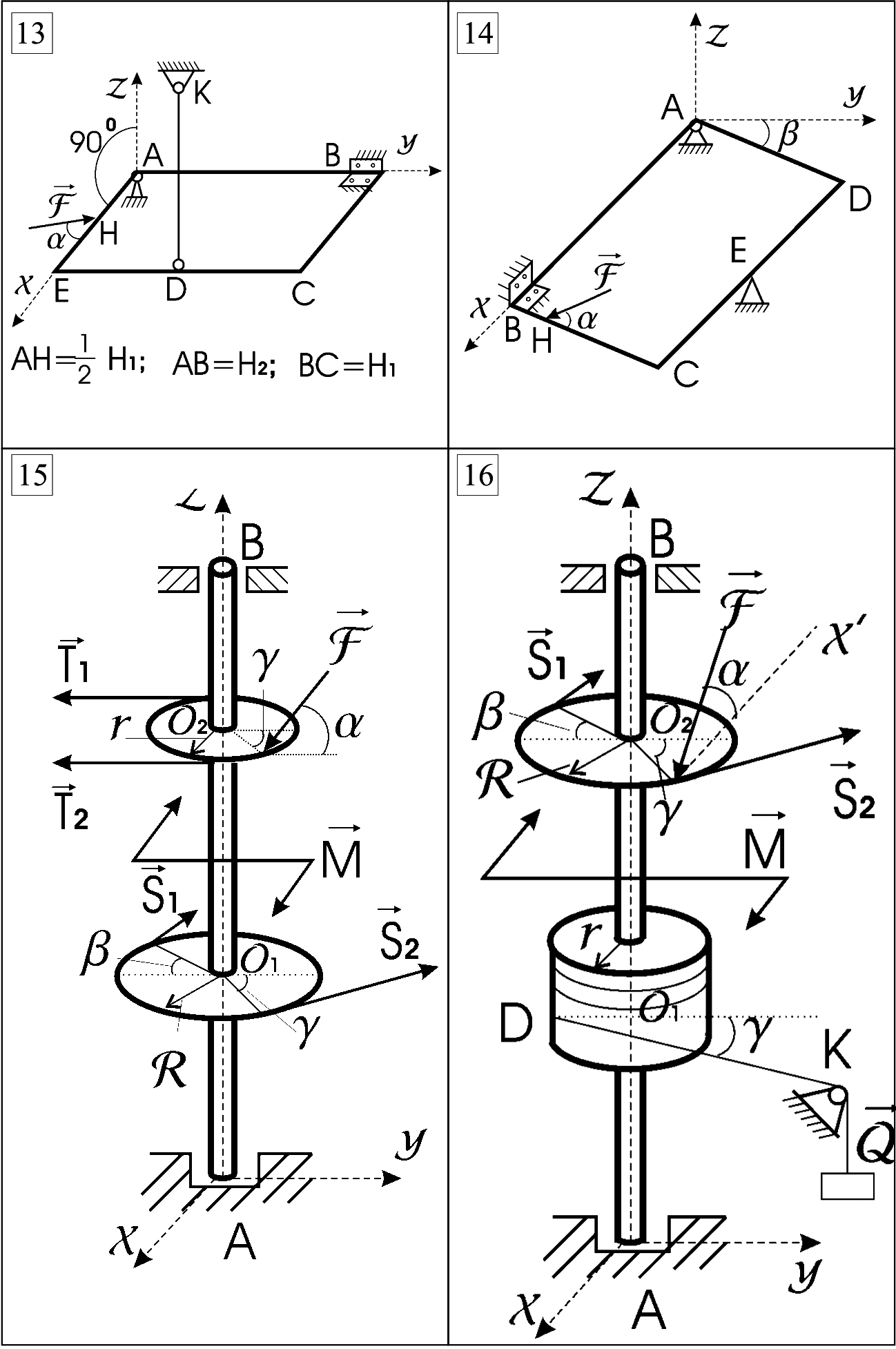
Рис. 4.1 (продолжение)
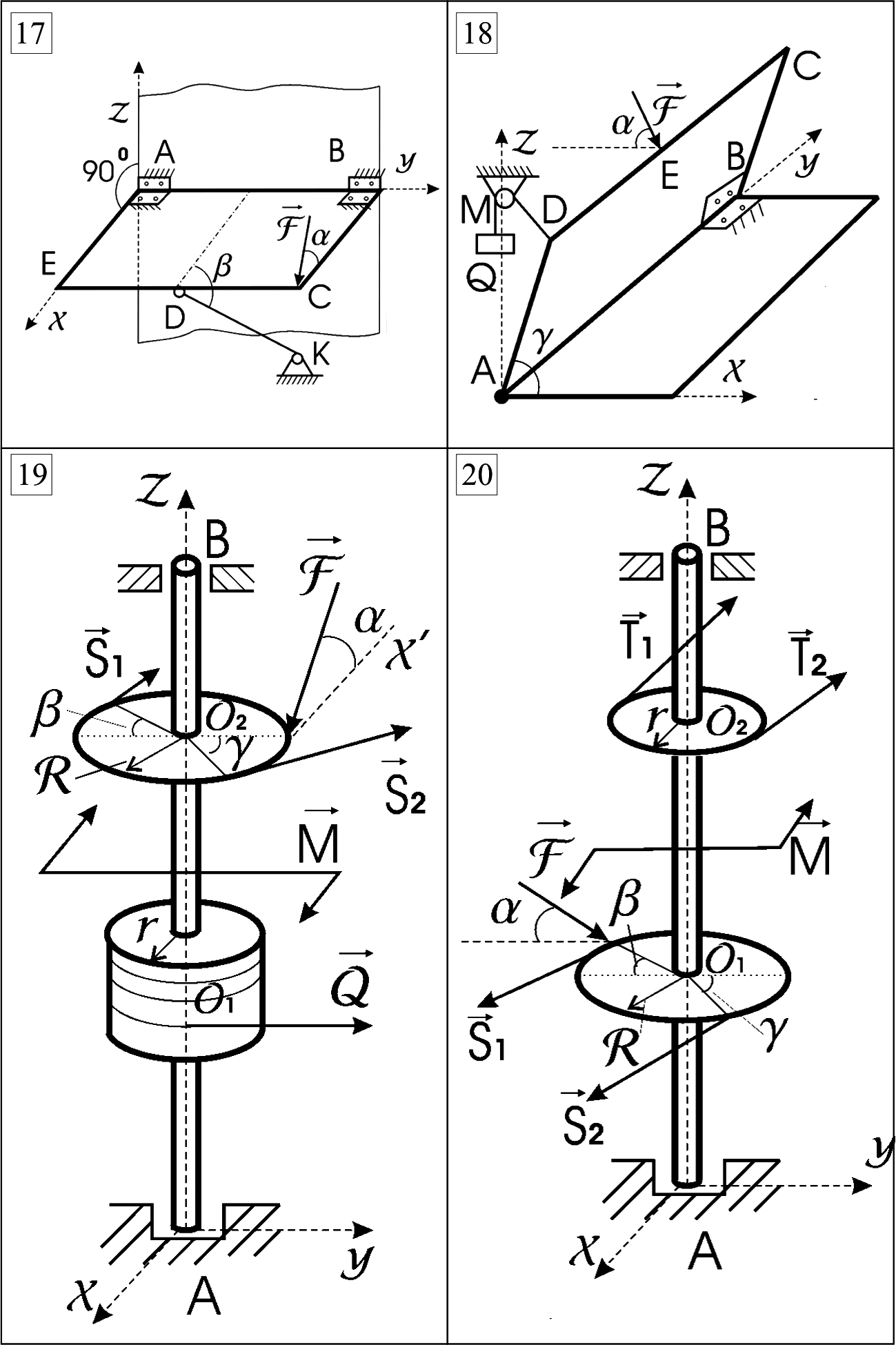
Рис. 4.1 (продолжение)
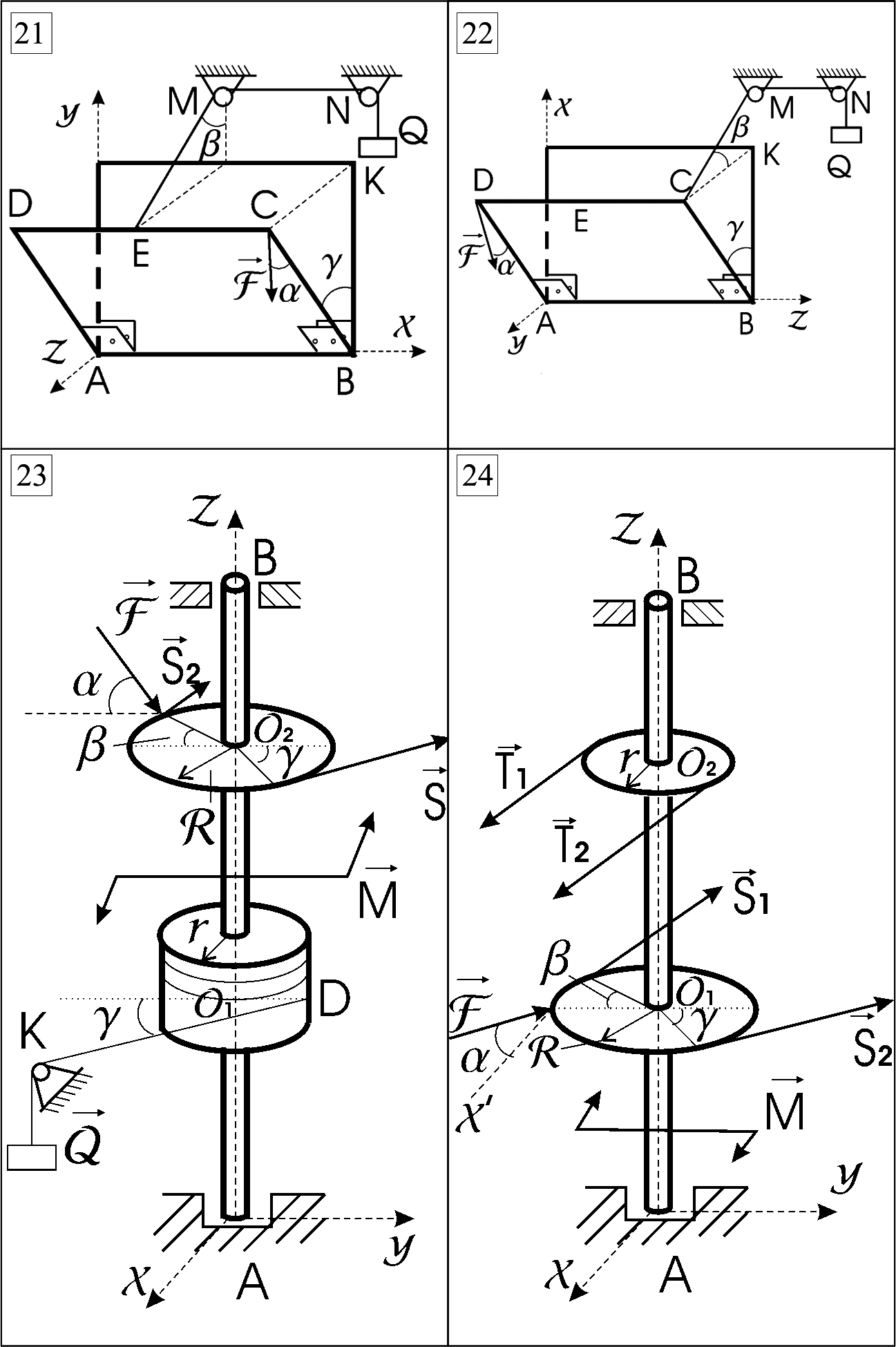
Рис. 4.1 (продолжение)
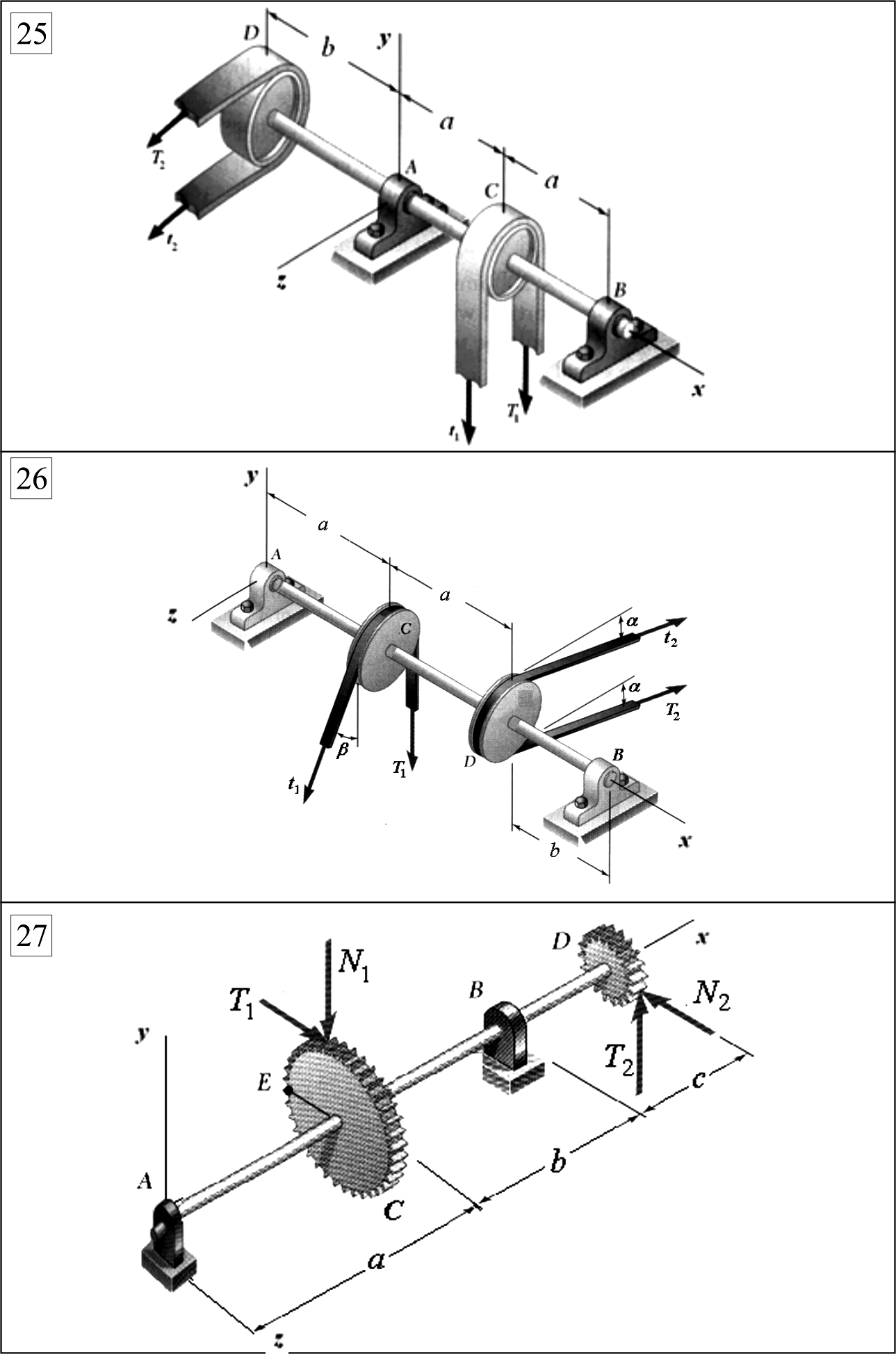
Рис. 4.1 (окончание)
Варианты
1-8:Однородная прямоугольная плита
ABCD веса G
закреплена в точке A
сферическим, а в точке B
цилиндрическим шарниром и поддерживается
в горизонтальном положении тросом KD
или невесомым стержнем KD
(вар.5, 6) , расположенным в вертикальной
плоскости и образующим с горизонтальной
плоскостью плиты угол .
На плиту действует сосредоточенная
нагрузка
![]() ,
образующая угол с
плоскостью плиты. Определить реакции
шарниров A и B
и натяжение троса
,
образующая угол с
плоскостью плиты. Определить реакции
шарниров A и B
и натяжение троса
![]() или усилие
или усилие
![]() в невесомом стержне KD (вар.5, 6).
Необходимые линейные размеры, углы,
величины сил приведены в табл.
4.1.
в невесомом стержне KD (вар.5, 6).
Необходимые линейные размеры, углы,
величины сил приведены в табл.
4.1.
Варианты 9-14,17: Однородная прямоугольная плита ABCD веса G закреплена в точке A и B цилиндрическим шарниром и поддерживается в горизонтальном положении тросом КС (вар. 12) и KD (вар. 13) или невесомым стержнем KD (вар.9-11, 17), расположенным в вертикальной плоскости и образующим с горизонтальной плоскостью плиты угол . В вар. 14 плита опирается на острие в точке E. На плиту действует сосредоточенная нагрузка , образующая угол с плоскостью плиты. Определить реакции шарниров A и B и натяжение троса или усилие в невесомом стержне . Необходимые линейные размеры, углы, величины сил приведены в табл. 4.1.
Т а б л и ц а 4.1