

3.1. Равновесие одного тела
Задача на равновесие одного тела под действием плоской произвольной системы сил решается в следующей последовательности:
выделить тело, равновесие которого рассматривается;
указать заданные активные силы, приложенные к телу;
в случае несвободного тела мысленно освобождаем тело от связей, заменив их действием реакций связей (направление которых выбирается исходя из вида связи (табл.2.1);
составить расчетную схему, указав на ней (на рисунке схемы конструкции) все приложенные к телу активные силы, моменты и реакции связей, распределенные нагрузки замещаются при этом сосредоточенными силами с указанием точек их приложения;
определить число неизвестных реакций и число возможных уравнений равновесия и установить, является ли рассматриваемая задача статически определимой;
выбрать систему координат и составить уравнения равновесия;
решить систему уравнений и определить все неизвестные величины;
провести качественный анализ полученного решения и его соответствия механическим условиям задачи.
Задачу на равновесие плоской системы сил, приложенной к одному телу, рассматриваем для двух случаев:
Расчетная работа №1. Равновесие тела, которое может опрокидываться;
Расчетная работа №2. Равновесие плоской произвольно расположенной системы сил.
Расчетная работа №1 Равновесие тела, которое может опрокидываться
При выполнении расчетной работы №1 на опрокидывание рассматривается предельное положение, когда тело находится в состоянии неустойчивого равновесия и может перейти из состояния покоя в движение. Всякое даже незначительное изменение элементов конструкции или сил, действующих на тело, ведет к опрокидыванию (вращению) конструкции вокруг некоторой оси, называемой осью опрокидывания. Некоторые активные силы, приложенные к телу, образуют пары, которые стремятся опрокинуть тело. Сумма моментов таких сил относительно оси опрокидывания называется моментом опрокидывания; другая часть активных сил создает пары, которые стремятся возвратить тело в исходное положение. Сумма моментов этих сил относительно оси опрокидывания называется моментом устойчивости.
Определить:
вес противовеса
![]() ,
при котором не произойдет опрокидывание
ненагруженного крана;максимальный
вес
,
при котором не произойдет опрокидывание
ненагруженного крана;максимальный
вес
![]() груза, который сможет поднять кран;
реакции в опорах
крана
груза, который сможет поднять кран;
реакции в опорах
крана
![]() при максимальной нагрузке.
при максимальной нагрузке.
Схемы конструкций механических кранов представлены на рис.3.1, а
исходные данные: веса
![]() кранов, положение центра тяжести C
и линейные размеры
в табл 3.1.
кранов, положение центра тяжести C
и линейные размеры
в табл 3.1.
Элементы конструкции принимаются абсолютно жесткими, стержневые детали сплошными и невесомыми, трение в шарнирах и опорах отсутствует.
Пример 3.1 выполнения расчетной работы №1. Равновесие плоской произвольной системы сил, приложенной к одному телу, которое может опрокидываться.
Дано: Механический кран (рис.3.2) веса
![]() установлен на горизонтальной поверхности.
Расстояние между опорами
установлен на горизонтальной поверхности.
Расстояние между опорами
![]() ,
абсцисса центра тяжести крана
,
абсцисса центра тяжести крана
![]() ,
вылет стрелы крана относительно опоры
,
вылет стрелы крана относительно опоры
![]() ,
,
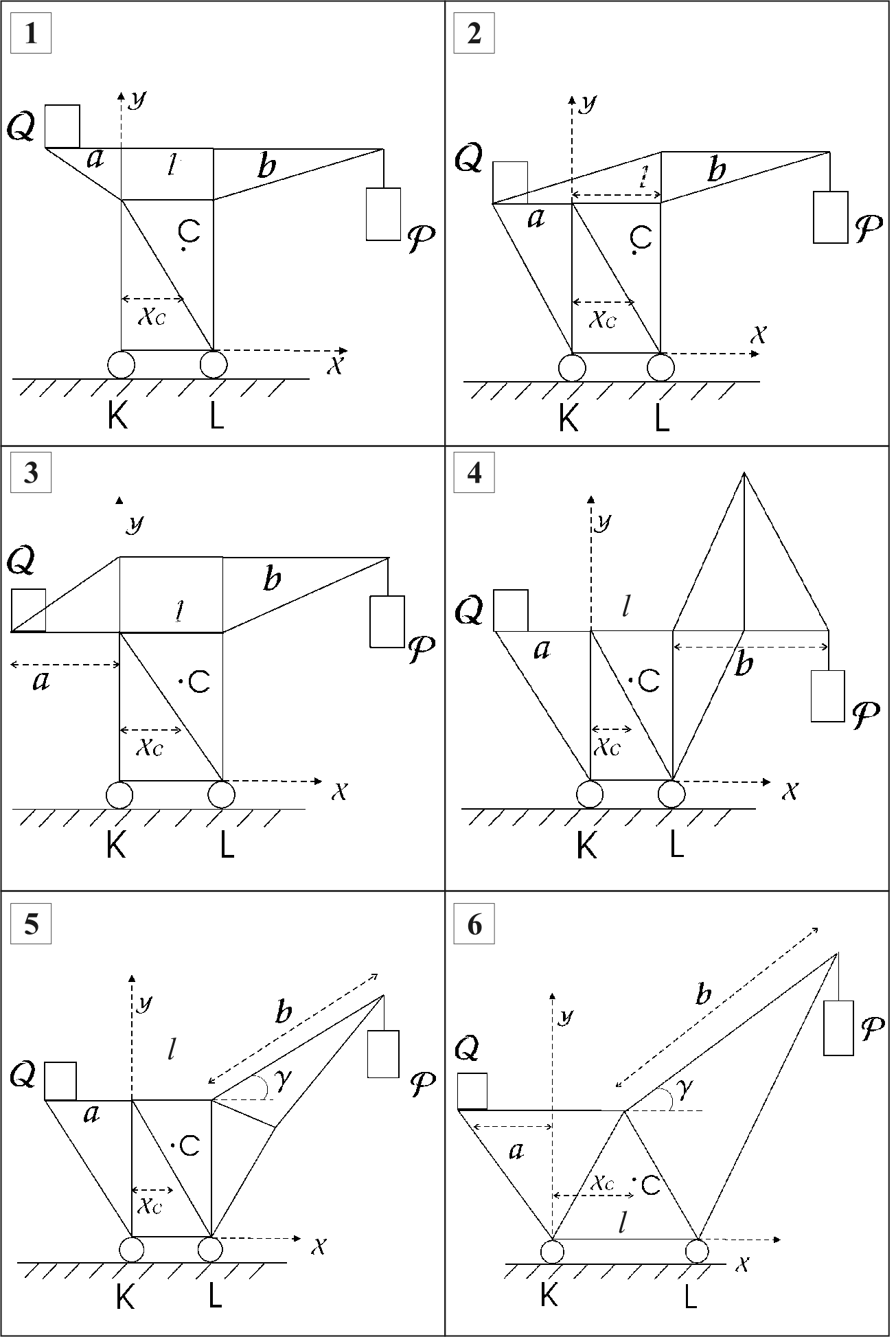
Рис. 3.1. Схемы конструкций механических кранов к расчетной работе № 1
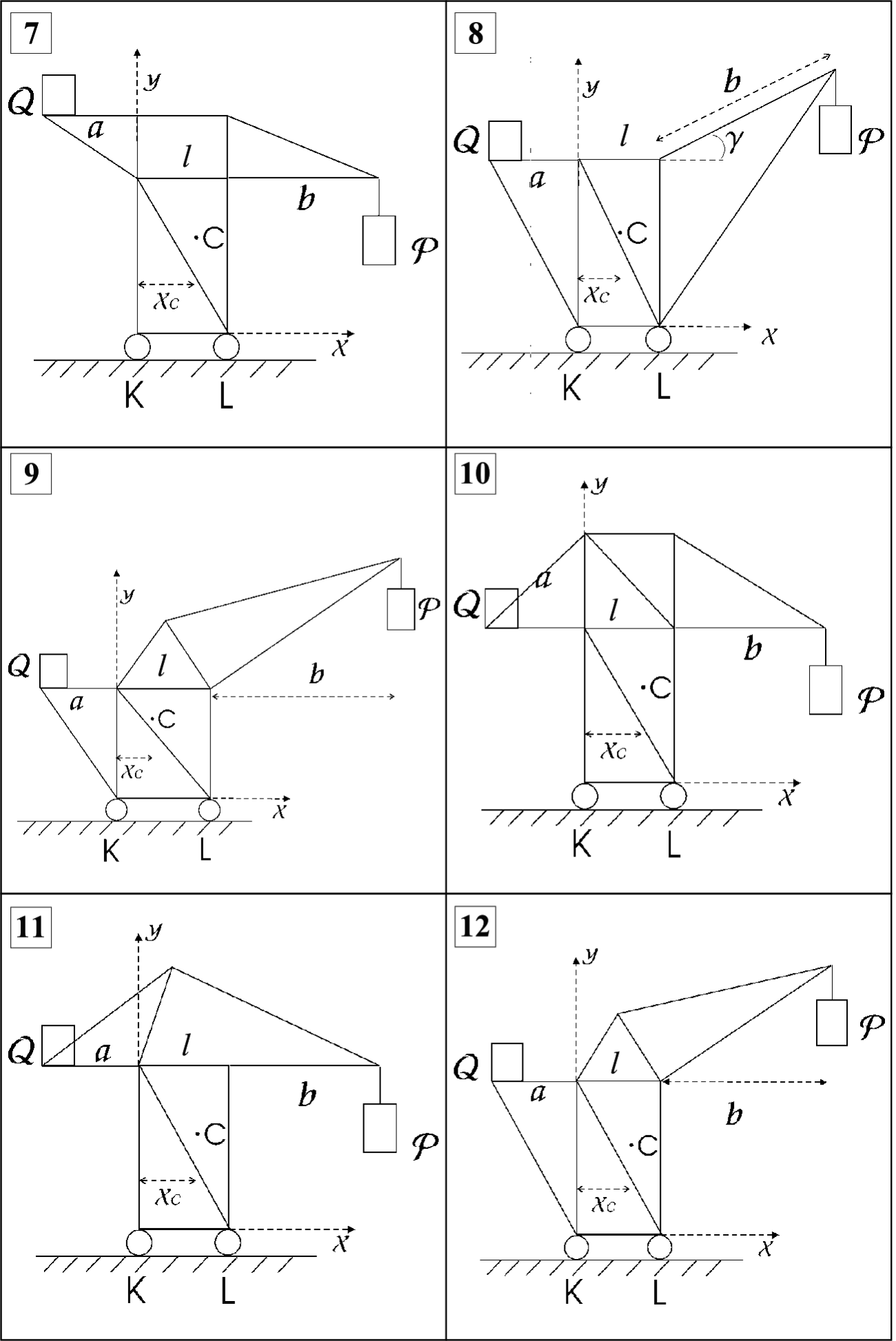
Рис. 3.1 (продолжение)
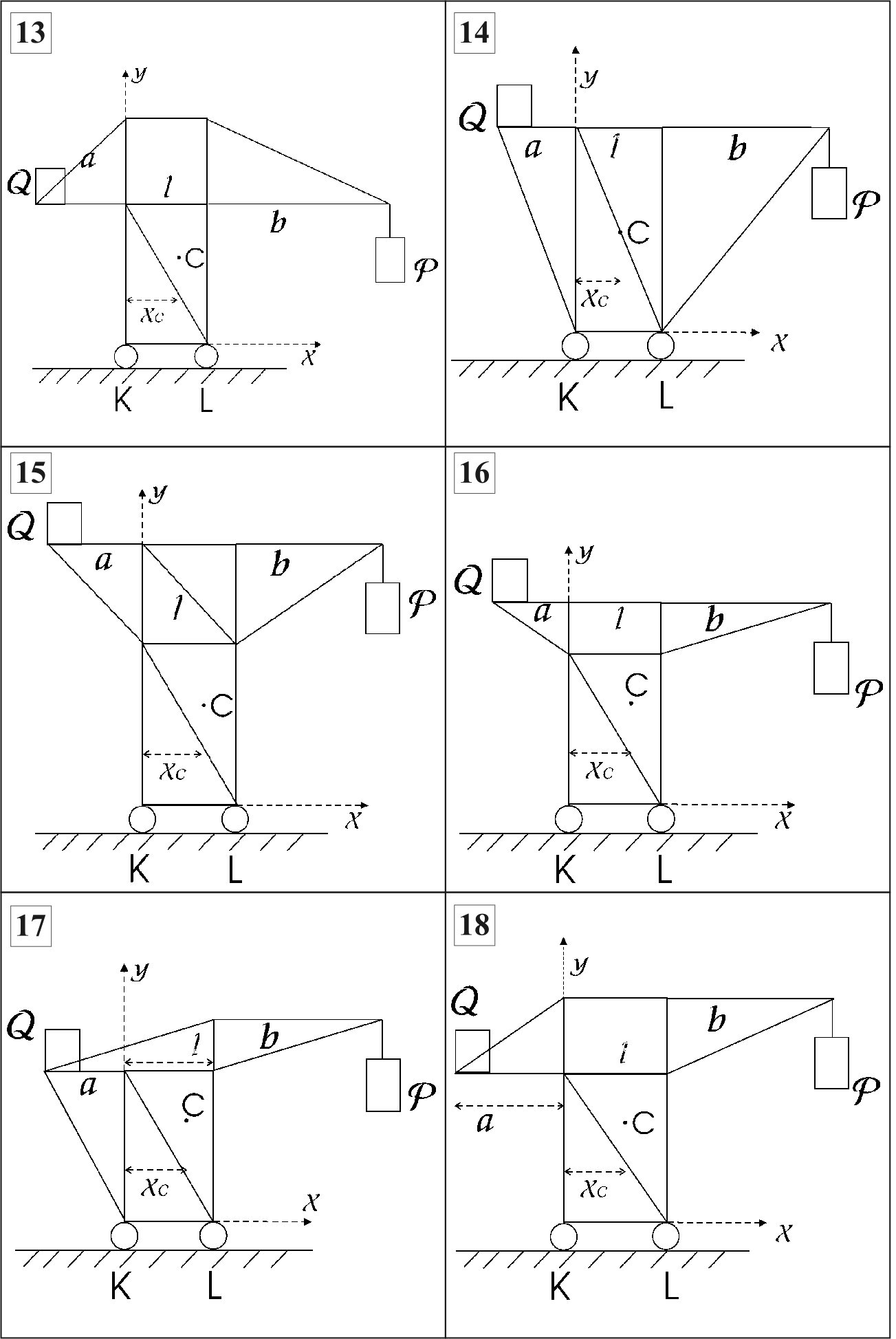
Рис. 3.1 (окончание)
Т а б л и ц а 3.1
Исходные данные к расчетной работе №1
№ схе- мы |
Линейные размеры, м |
Координата центра тяжести, м |
Угол, град |
Вес крана, кН |
||
a |
b |
l |
xC |
|
G |
|
1 |
0,8 1,0 1,2 |
2,2 2,5 3,0 |
1,6 2,0 2,4 |
0,64 0,80 0,96 |
– – – |
35 40 44 |
2 |
1,2 0,8 1,0 |
3,0 2,0 2,5 |
2,4 1,6 2,0 |
0,48 0,32 0,40 |
– – – |
60 50 50 |
3 |
0,6 0,4 1,4 |
1,5 1,0 3,5 |
1,2 0,8 2,8 |
0,12 0,08 0,28 |
– – – |
60 62 56 |
4 |
1,6 1,8 2,0 |
4,0 4,5 5,0 |
3,2 3,6 4,0 |
3,2 3,6 4,0 |
– – – |
45 44 35 |
5 |
1,4 0,6 0,4 |
3,5 1,5 1,0 |
1,2 0,8 0,6 |
0,42 0,18 0,12 |
60 45 30 |
36 40 42 |
6 |
3,4 4,0 3,5 |
4,5 5,0 4,0 |
3,6 4,0 3,2 |
0,36 0,46 0,58 |
30 35 30 |
32 36 40 |
7 |
0,7 0,9 1,1 |
1,75 2,25 2,75 |
1,4 1,8 2,2 |
0,14 0,30 0,45 |
– – – |
42 45 50 |
8 |
0,5 1,3 1,5 |
1,25 3,75 3,75 |
0,4 1,2 1,3 |
0,15 0,39 0,45 |
– – – |
30 34 32 |
Продолжение табл. 3.1
№ схе- мы |
Линейные размеры, м |
Координата центра тяжести, м |
Угол, град |
Вес крана, кН |
||
a |
b |
l |
xC |
|
G |
|
9 |
1,7 1,9 1,0 |
4,25 4,75 2,50 |
1,6 1,5 1,8 |
0,51 0,57 0,26 |
– – – |
30 34 32 |
10 |
1,1 1,9 0,9 |
0,85 1,22 0,68 |
0,5 0,6 0,4 |
0,32 0,25 0,45 |
– – – |
45 44 46 |
11 |
1,5 1,3 0,5 |
3,10 2,62 1,05 |
2,2 1,9 1,2 |
0,22 0,11 0,34 |
– – – |
30 35 32 |
12 |
1,2 1,9 1,7 |
3,10 4,75 4,25 |
2,44 3,80 3,40 |
0,24 0,38 0,34 |
– – – |
42 45 44 |
13 |
0,8 0,6 1,4 |
2,20 1,70 3,70 |
1,76 1,36 2,96 |
0,76 0,56 1,20 |
– – – |
34 35 30 |
14 |
1,4 0,8 0,6 |
3,72 2,25 1,76 |
2,96 1,76 1,36 |
0,30 0,18 0,14 |
– – – |
40 45 44 |
15 |
1,0 1,5 2,0 |
4,76 3,65 4,60 |
2,10 1,42 2,15 |
0,22 0,35 0,65 |
– – – |
50 48 46 |
Окончание табл. 3.1
№ схе- мы |
Линейные размеры, м |
Координата центра тяжести, м |
Угол, град |
Вес крана, кН |
||
a |
b |
l |
xC |
|
G |
|
16 |
0,8 1,0 1,2 |
2,2 2,5 3,0 |
1,6 2,0 2,4 |
0,64 0,80 0,96 |
– – – |
35 40 44 |
17 |
1,2 0,8 1,0 |
3,0 2,0 2,5 |
2,4 1,6 2,0 |
0,48 0,32 0,40 |
– – – |
60 50 50 |
18 |
0,6 0,4 1,4 |
1,5 1,0 3,5 |
1,2 0,8 2,8 |
0,12 0,08 0,28 |
– – – |
60 62 56 |
расстояние относительно опоры K,
на котором должен располагаться
противовес для обеспечения максимальной
грузоподъемности крана, равно
![]() .
.
Решение. Рассмотрим равновесие
крана (рис.3.2). К нему приложены активные
заданные силы: вес крана
![]() ,
вес груза
и
вес противовеса
,
вес груза
и
вес противовеса
![]() .
На кран наложены д
.
На кран наложены д ве
связи катковые
опоры K, L,
которые не допускают смещения крана
вниз от опорной поверхности по вертикали,
но не препятствуют его повороту вокруг
точек K, L.
Так как трением в опорах пренебрегаем,
то реакции опор будут направлены
нормально к поверхности.
ве
связи катковые
опоры K, L,
которые не допускают смещения крана
вниз от опорной поверхности по вертикали,
но не препятствуют его повороту вокруг
точек K, L.
Так как трением в опорах пренебрегаем,
то реакции опор будут направлены
нормально к поверхности.
Теперь рассматриваем равновесие крана
как свободного тела, находящегося под
действием сил
![]() ,
,![]() .
.
Опрокидывание ненагруженного крана под действием противовеса возможно вокруг левой опоры K в направлении против часовой стрелки, при этом кран правой опорой L только касается поверхности, не оказывая на нее никакого давления. Поэтому вес противовеса находится из условия равенства моментов опрокидывания и устойчивости
![]() ,
откуда
,
откуда
![]() =
=
![]() .
.
Максимально загруженный кран может опрокидываться вокруг правой опоры L по часовой стрелке. Поэтому уравнение моментов составим относительно точки L.
![]()
Из полученного уравнения находим наибольший вес поднимаемого груза
![]() =27
кН.
=27
кН.
Для определения реакций в опорах крана составим уравнения равновесия для полученной системы сил по третьей форме два уравнения моментов относительно опор K и L:
![]()
![]()
![]()
![]()
Из полученных уравнений находим искомые реакции
![]()
![]()
РАСЧЕТНАЯ РАБОТА №2
Равновесие плоской произвольно расположенной системы сил
Определить реакции связей.
Схемы конструкций представлены на
рис.3.3, исходные данные – в табл.
3.2, где G
сила тяжести, P
активная сила,
![]()
равномерно распределенные нагрузки,
M
момент.
равномерно распределенные нагрузки,
M
момент.
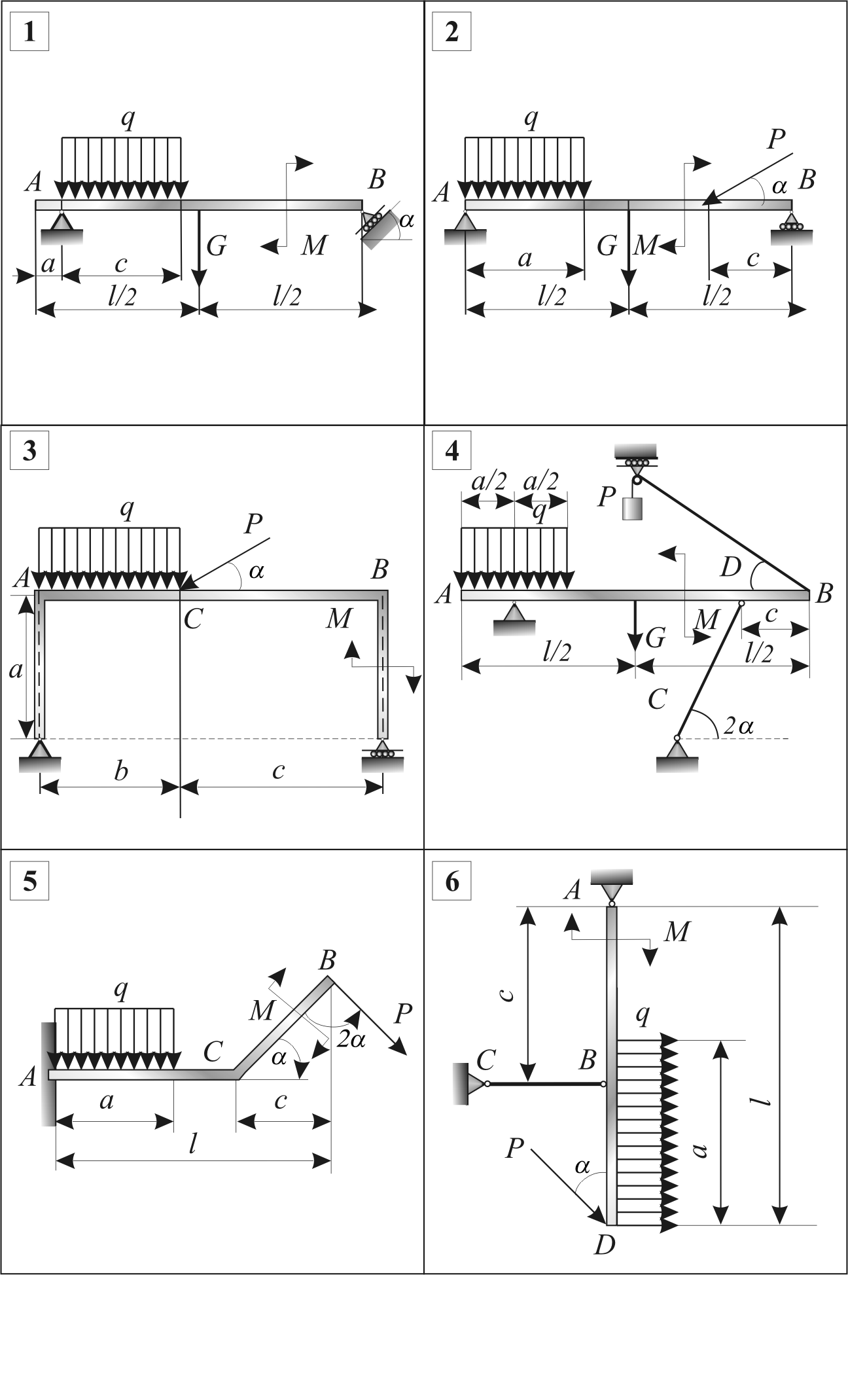
Рис. 3.3. Схемы конструкций к расчетной работе № 2
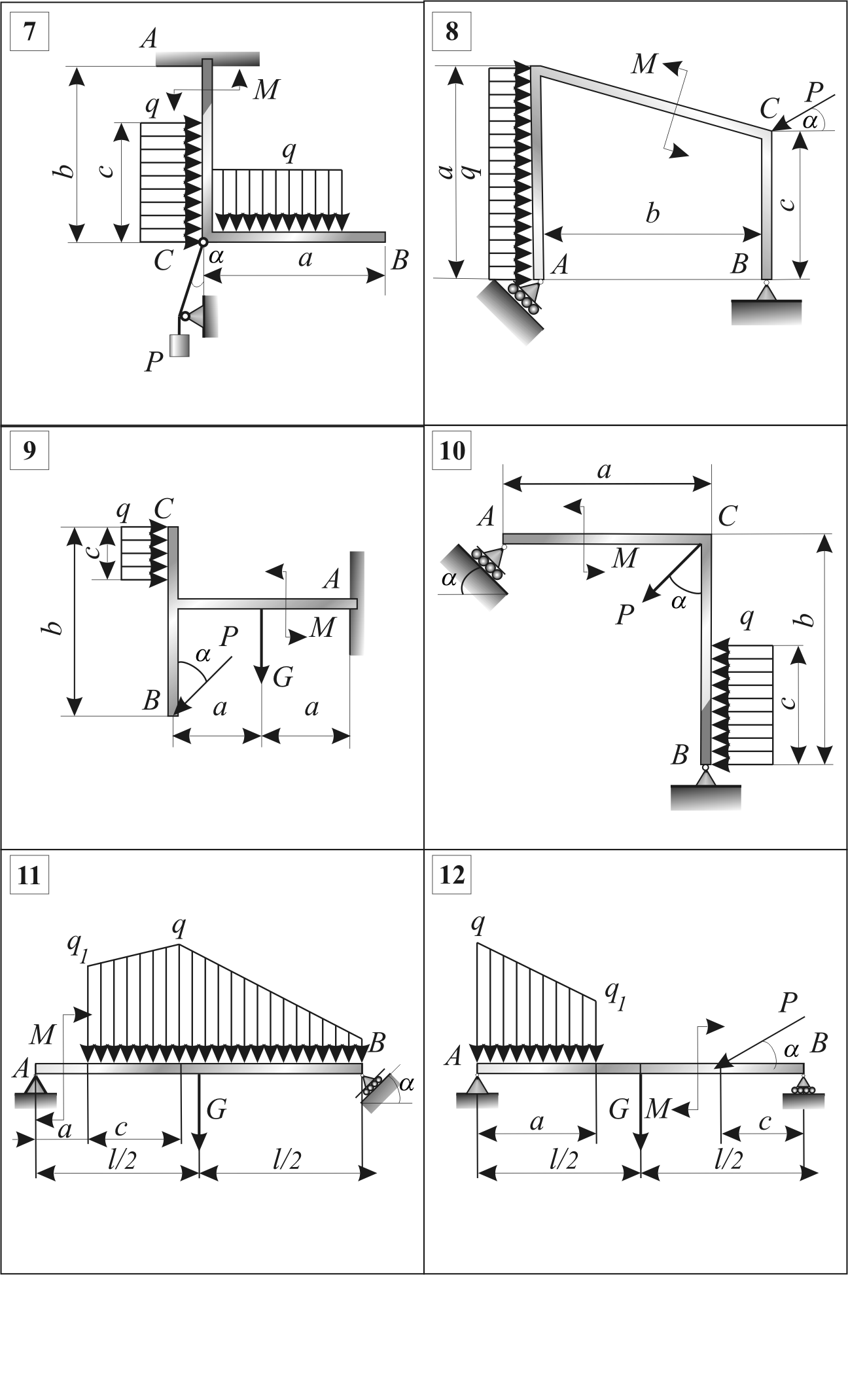
Рис. 3.3 (продолжение)
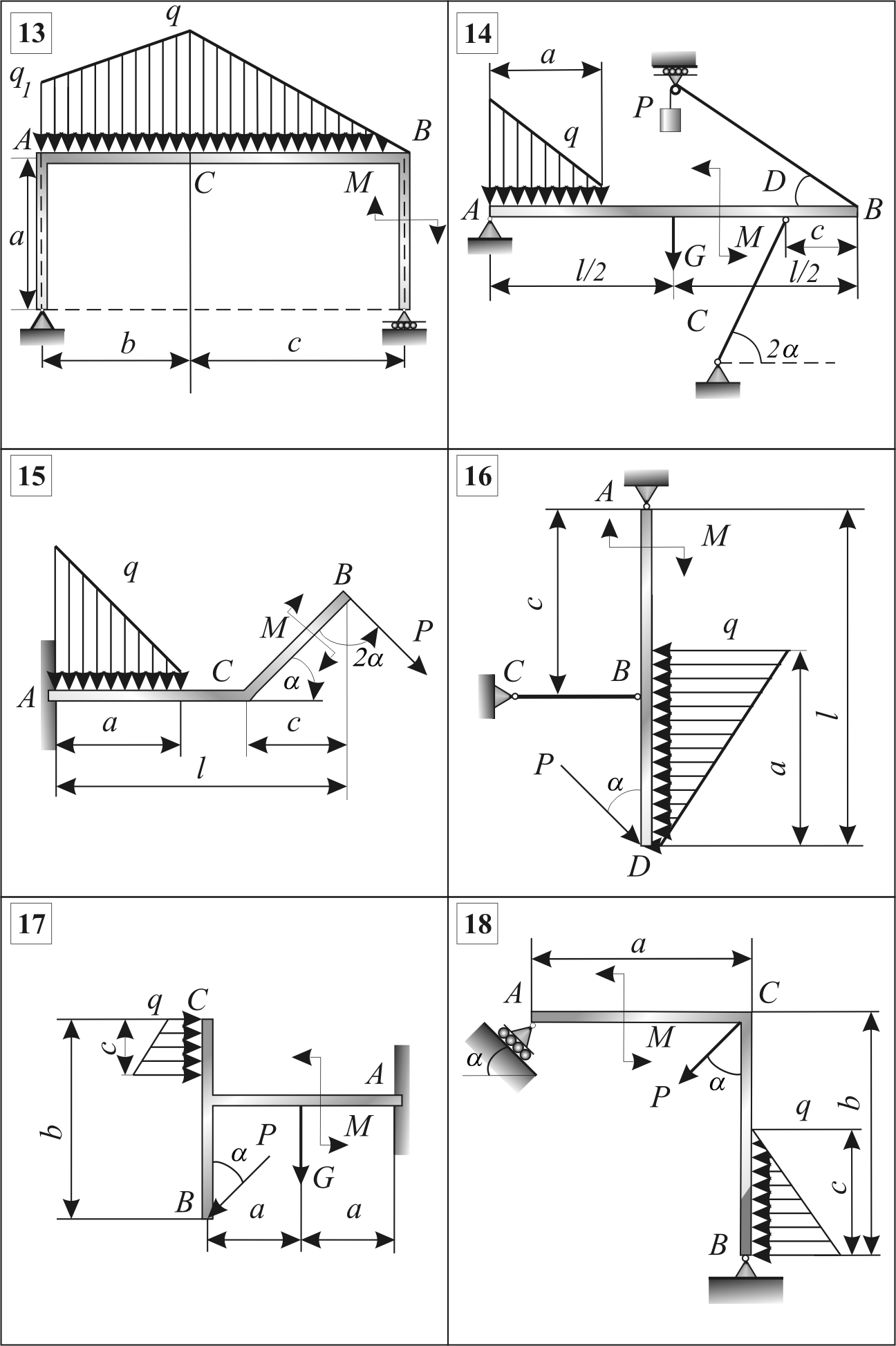
Рис. 3.3 (окончание)
Т а б л и ц а 3.2
Исходные данные к расчетной работе № 2
№ схе- мы |
Линейные размеры, м
|
Угол, град |
G |
P |
|
M |
|||
a |
b=l |
c |
|
кН |
кН/м |
кНм |
|||
1 |
2 3 3 |
4 6 6 |
1 2 3 |
45 90 30 |
6 8 4 |
|
3 4 5 |
7 8 9 |
|
2 |
2 3 3 |
4 6 6 |
1 2 3 |
30 45 60 |
6 8 4 |
5 6 8 |
2 3 4 |
9 8 7 |
|
3 |
2 2 2 |
4 4 3 |
1 0 1 |
30 60 90 |
|
2 3 4 |
4 5 6 |
9 8 6 |
|
4 |
1 2 2 |
4 5 5 |
1 1 2 |
30 45 60 |
6 7 8 |
5 4 6 |
2 4 6 |
8 9 6 |
|
5 |
2 5 3 |
4 10 8 |
2 4 2 |
30 45 60 |
|
4 5 6 |
3 4 6 |
6 7 9 |
|
6 |
3 2 2 |
4 2 3 |
3 1 1 |
30 60 45 |
|
6 7 8 |
2 4 6 |
8 9 6 |
|
7 |
2 2 3 |
5 6 8 |
2 3 3 |
60 30 45 |
|
9 8 7 |
2 4 6 |
5 6 8 |
|
8 |
2 4 2 |
3 5 2 |
1 2 2 |
45 60 30 |
|
3 4 5 |
2 4 6 |
5 8 9 |
|
9 |
2 2 2 |
4 2 6 |
1 2 4 |
30 60 45 |
4 6 8 |
5 6 8 |
4 6 8 |
8 9 7 |
|
10 |
4 4 3 |
4 3 4 |
2 3 3 |
30 45 60 |
|
7 8 9 |
1 2 4 |
8 9 7 |
|
Окончание табл. 3.2
№ схе- мы |
Линейные размеры, м
|
Угол, град |
G |
P |
|
M |
|||
a |
b=l |
c |
|
кН |
кН/м |
кНм |
|||
11 |
2 3 3 |
4 6 6 |
1 2 3 |
45 90 30 |
6 8 4 |
|
8 /2 4 /2 6/3 |
7 8 9 |
|
12 |
2 3 3 |
4 6 6 |
1 2 3 |
30 45 60 |
6 8 4 |
5 6 8 |
6/2 6/3 8/4 |
9 8 7 |
|
13 |
2 2 2 |
4 4 3 |
1 0 1 |
30 60 90 |
|
2 3 4 |
8/4 6/2 6/3 |
9 8 6 |
|
14 |
1 2 2 |
4 5 5 |
1 1 2 |
30 45 60 |
6 7 8 |
5 4 6 |
2 4 6 |
8 9 6 |
|
15 |
2 5 3 |
4 10 8 |
2 4 2 |
30 45 60 |
|
4 5 6 |
3 4 6 |
6 7 9 |
|
16 |
3 2 2 |
4 2 3 |
3 1 1 |
30 60 45 |
|
6 7 8 |
2 4 6 |
8 9 6 |
|
17 |
2 2 2 |
4 2 6 |
1 2 4 |
30 60 45 |
4 6 8 |
5 6 8 |
4 6 8 |
8 9 7 |
|
18 |
4 4 3 |
4 3 4 |
2 3 3 |
30 45 60 |
|
7 8 9 |
1 2 4 |
8 9 7 |
|
Пример 3.2 выполнения расчетной работы № 2. Равновесие плоской произвольно расположенной системы сил. Схема балки показана на рис.3.4.
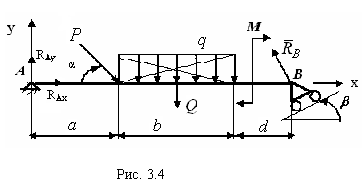 Дано: Горизонтальная балка АВ
нагружена системой сил: сосредоточенной
силой Р = 4 кН, моментом М = 5 кНм
пары сил и равномерно распределенной
нагрузкой интенсивности q
= 2 кН/ м; размеры а = 2м; b=Зм;
d=2 м;
Дано: Горизонтальная балка АВ
нагружена системой сил: сосредоточенной
силой Р = 4 кН, моментом М = 5 кНм
пары сил и равномерно распределенной
нагрузкой интенсивности q
= 2 кН/ м; размеры а = 2м; b=Зм;
d=2 м;
углы α =60°; ß =30˚.
Определить: реакции опор
![]() и
и
![]() ,
пренебрегая весом балки
АВ.
,
пренебрегая весом балки
АВ.
Решение. Рассмотрим равновесие балки АВ под действием заданных активных сил. Для составления уравнений равновесия необходимо равномерно распределенную по закону прямоугольника нагрузку на заданном участке балки b заменить равнодействующей, равной численно площади заштрихованной фигуры-прямоугольника Q=q·b=2·3=6 кН, и приложенной в центре тяжести этой фигуры.
Освобождаем систему от связей, направив
реакцию
![]() в катковой опоре (подвижном шарнире В)
перпендикулярно плоскости опоры,
а реакцию в
неподвижном шарнире А
заменяем двумя составляющими
в катковой опоре (подвижном шарнире В)
перпендикулярно плоскости опоры,
а реакцию в
неподвижном шарнире А
заменяем двумя составляющими
![]() .
.
Поставленную задачу можно записать коротко следующим образом:
AB
![]() ,
,
![]() .
.
Так как число неизвестных реакций
(![]() ,
,![]() ,
,![]() )
равно трем, то рассматриваемая задача
является статически определимой.
)
равно трем, то рассматриваемая задача
является статически определимой.
Составим уравнения равновесия плоской системы сил, приложенной к балке АВ:
1.![]() Pcos
sin
+
=
0;
Pcos
sin
+
=
0;
![]() ;
;
2.![]()
Psin
Q
Psin
Q
![]()
cos
= 0;
;
cos
= 0;
;
3.![]() P
a
sin
Q
P
a
sin
Q
![]()
M
+
M
+
![]()
cos
= 0.
cos
= 0.
Из (3):

Из (1): = Pcos + sin = 4 0,5+5,4 0,5 = 0,7 kH.
Bp (2):
=
Psin
+
Q
cos
= 4
![]() + 6
5.4
= 4,8
kH.
+ 6
5.4
= 4,8
kH.
Для проверки полученных значений опорных реакций можно составить дополнительное уравнение равновесия:
![]()
7
+
P5sin
+
Q
3,5
M
= 0;
7
+
P5sin
+
Q
3,5
M
= 0;
![]() 0=0, значит, реакции определены верно.
0=0, значит, реакции определены верно.
Ответ: = 0.7 кН; = 4.8 кН; =5.4 кН.