

3. Подбор электродвигателя и выбор типа редуктора
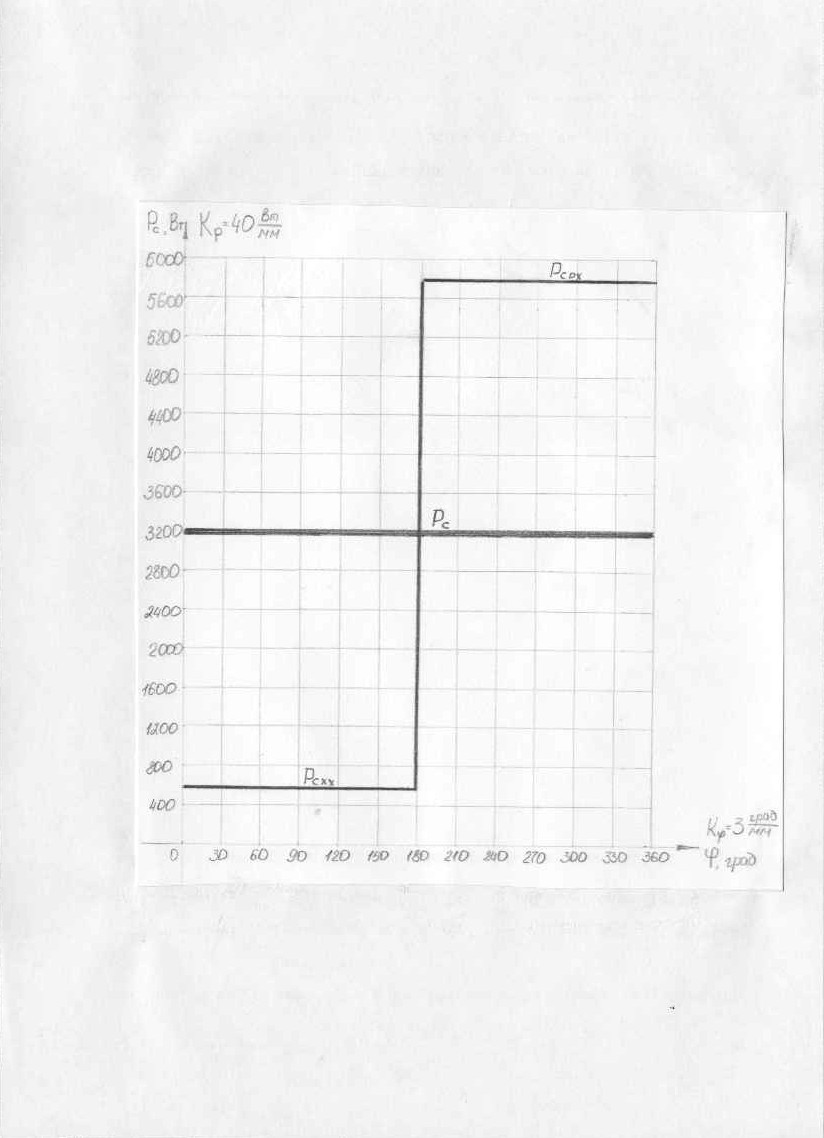
3.1 График изменения силы полезного сопротивления в функции от угла поворота φ1 кривошипа представлен на чертеже (эта сила постоянна и равна FСРХ при рабочем ходе и FСХХ при холостом ходе). Мощности сил полезного сопротивления перемещению исполнительного органа
на участке рабочего хода:
P![]() Вт;
Вт;
на участке холостого хода:
P![]() Вт.
Вт.
2.2 Средние значения силы полезного сопротивления и её мощности:
FСР = (2500 + 250)/2 = 1375 Н;
PCР = 1375∙2,32 = 3190 Вт.
Графики изменения силы полезного сопротивления и её мощности (при рабочем и холостом ходе и средние) в функции от угла поворота φ1 кривошипа представлен на чертеже. Эти величины изменяются по линейно-постоянному закону.
2.3 Коэффициент полезного действия исполнительного механизма с четырьмя кинематическими парами (вращательных – качения, поступательной – скольжения) примем равным ηМ ≈ 0,99∙0,99∙0,99∙0,98 ≈ 0,95.
2.4 Среднее значение мощности сил сопротивления вращению кривошипа
PК = PCР/ ηМ = 3190/0,95 ≈ 3360 Вт.
2.5 Среднее значение момента сил сопротивления вращению кривошипа
TК = PК/ ω1 = 3360/15 ≈ 224 Н∙м.
2.6 При отсутствии каких-либо дополнительных соображений для привода машины в действие принимают высокооборотный (с одной парой полюсов и синхронной угловой скоростью вращения ротора ωДО = 314 1/с) электродвигатель переменного тока, асинхронный, единой серии А – такой электродвигатель имеет меньшие размеры, массу и стоимость. В качестве механизма, выполненного в виде редуктора (с механизмом, размещённом в корпусе), для передачи вращения с ротора электродвигателя на кривошип желательно использовать зубчатый цилиндрический одноступенчатый механизм, выполненный в виде редуктора – он самый простой, недефицитный и дешёвый. При скорости вращения кривошипа 15 1/с
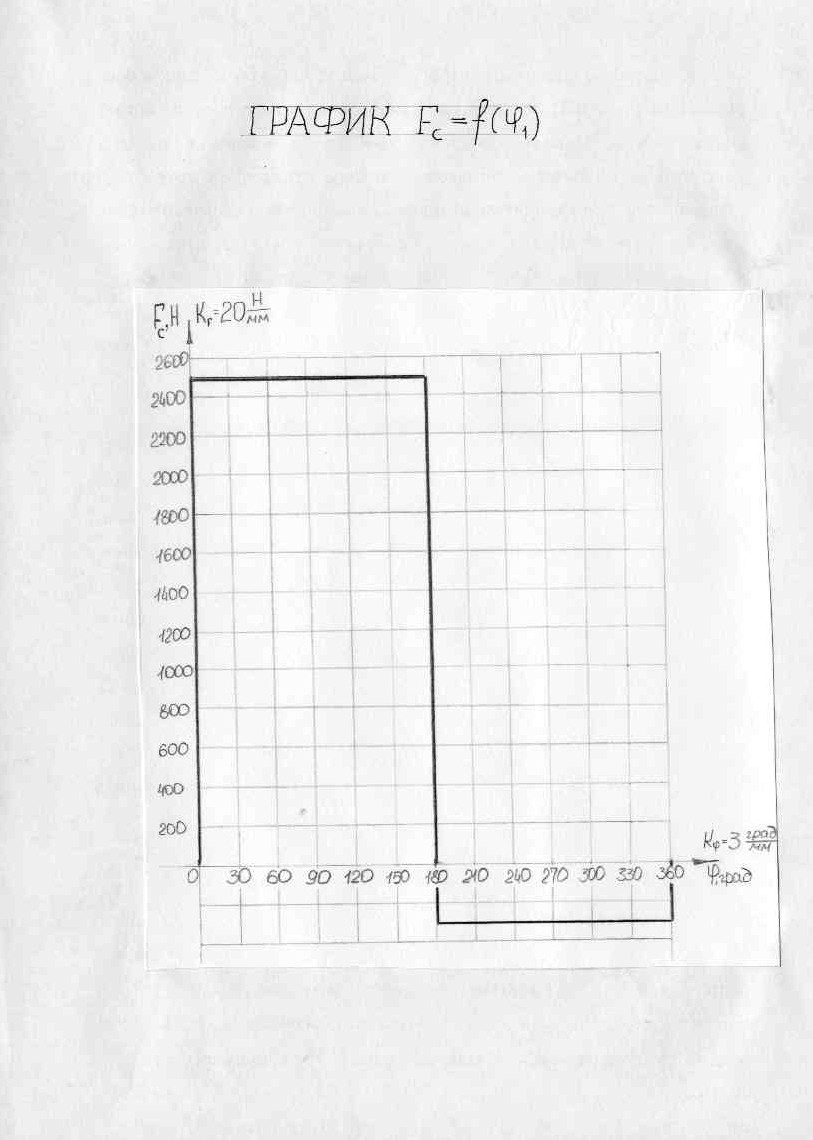
График P = f(φ1)
скорость вращения быстроходного двигателя необходимо уменьшить в u10 = 314/15 ≈ 21. Для реализации такого передаточного числа (для
уменьшения скорости в 21 раз) в этом случае требуется использовать не самый рациональный тип зубчатого редуктора – двухступенчатый цилиндрический с большими размерами и массой или одноступенчатый червячный с малым коэффициентом полезного действия. Поэтому в виде исключения для привода машины в действие при заданных параметрах примем среднеоборотный двигатель (с двумя парами полюсов) с ωДО = 157 1/с, при котором передаточное число u20 = 157/15 ≈ 10 – это ориентировочное значение передаточного числа механизма-передачи в виде редуктора, которое необходимо разместить между двигателем и кривошипом.
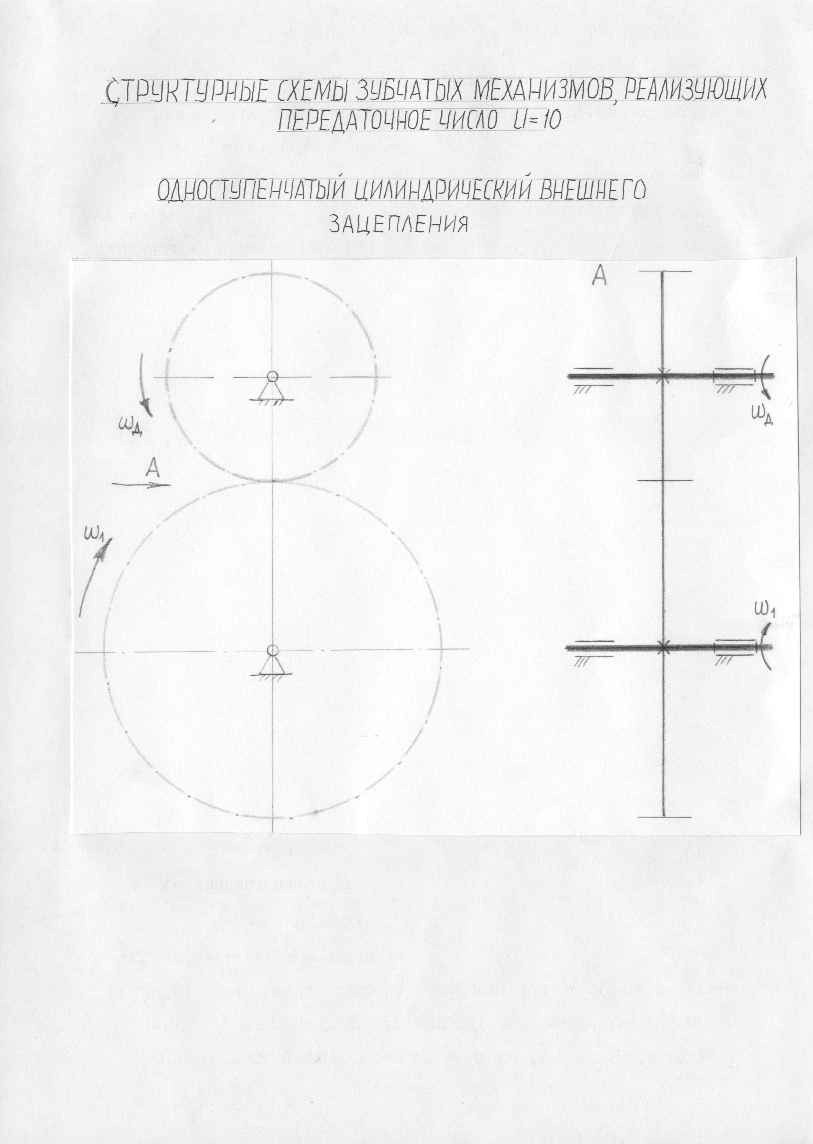
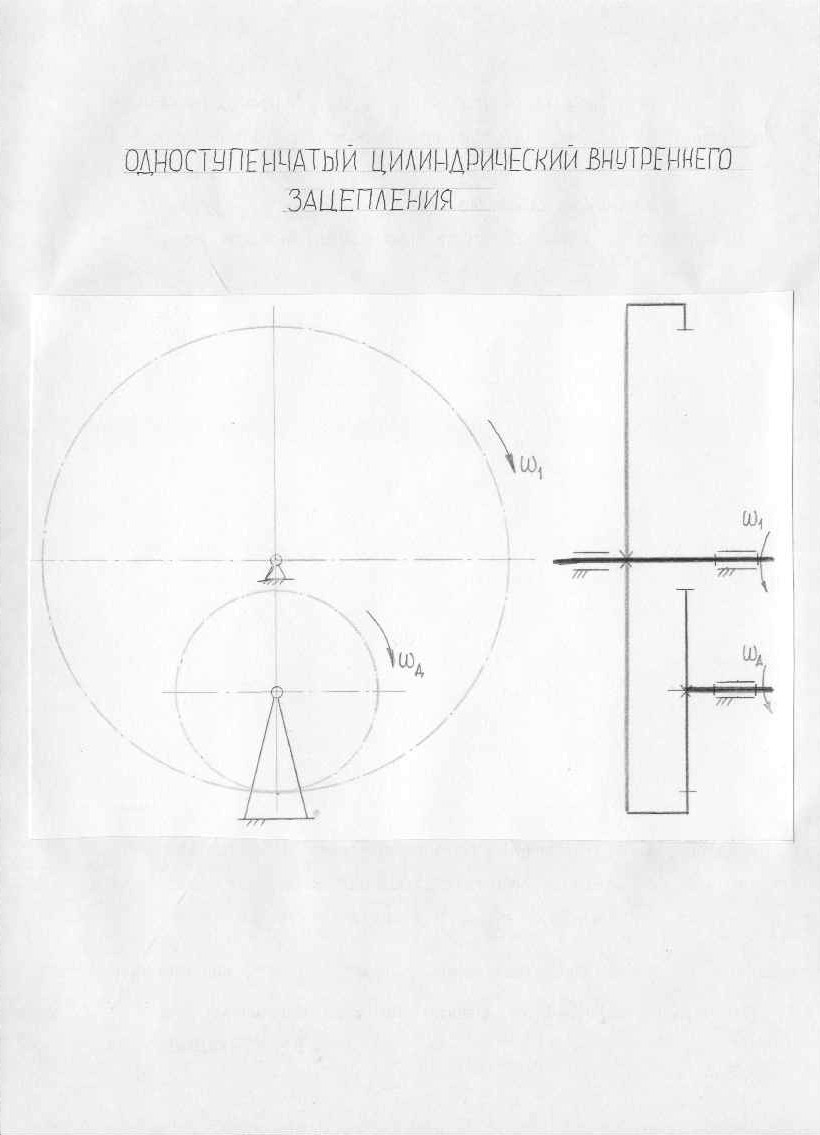
2.7 Возможные выполнения и компоновки зубчатых передач (редукторов), реализующих различные передаточные числа:
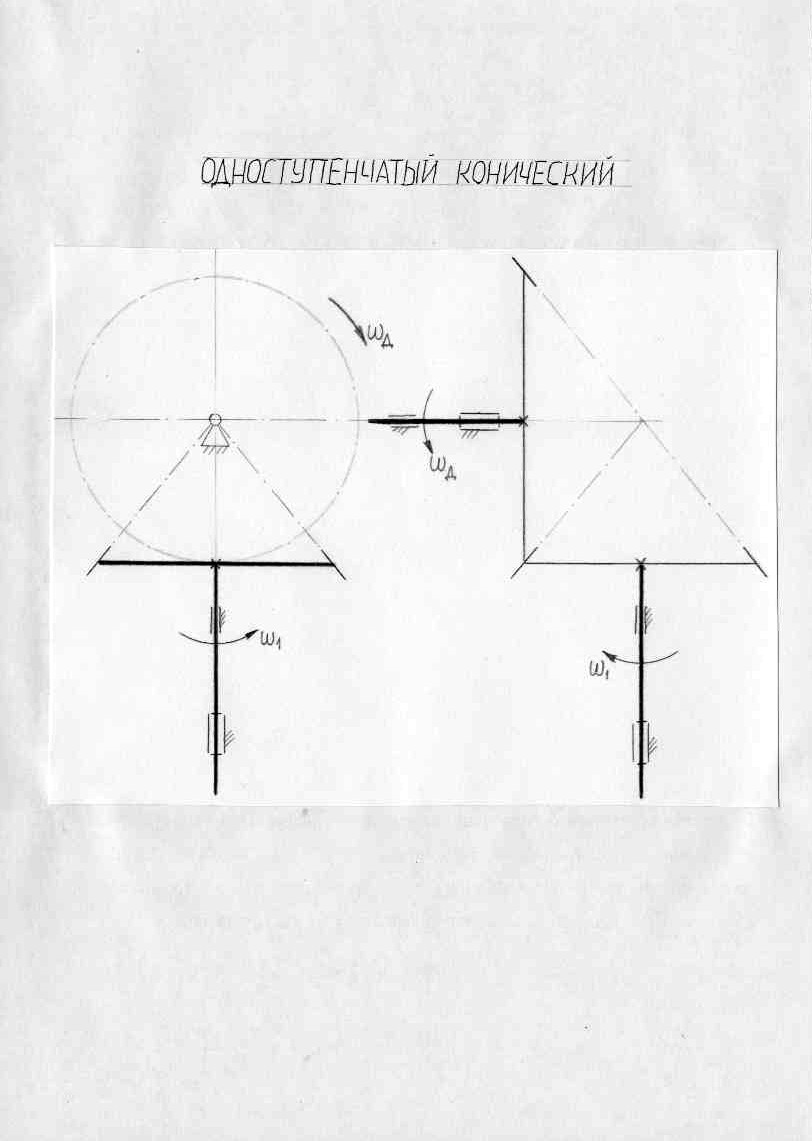
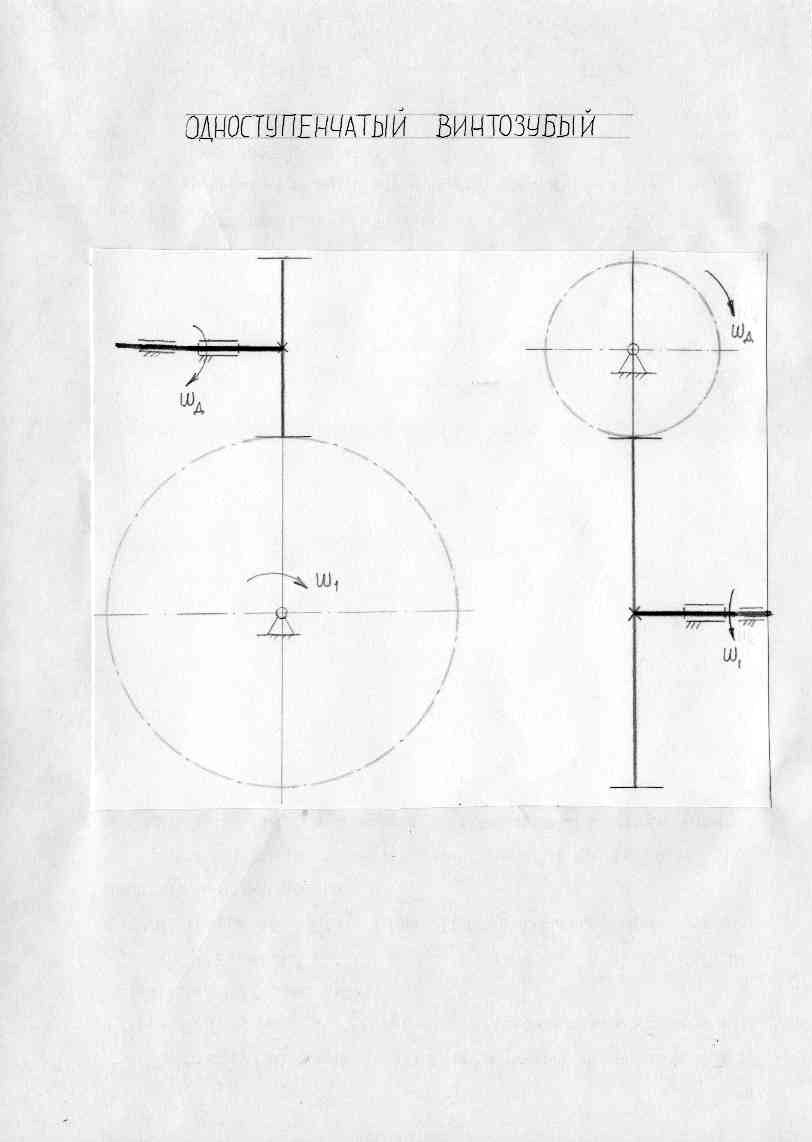
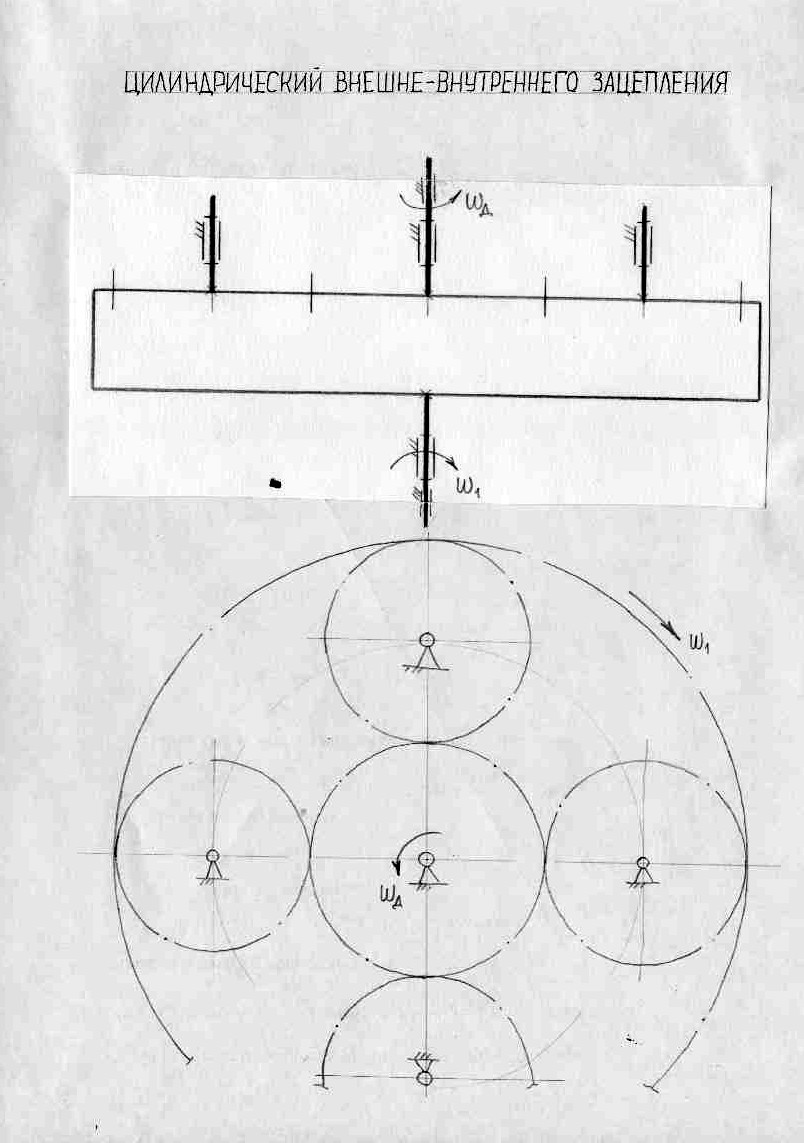
при u ≈ 7…10 – одноступенчатый цилиндрический внешнего зацепления; то же, внутреннего; то же, конический; то же, винтозубчатый; цилиндрический внешне-внутреннего зацепления; цилиндрический
планетарный нескольких выполнений (с механизмом Чарльза-Джеймса, с паразитным рядом колёс, с внешней и внутренней ступенью) – структурные схемы представлены на чертеже;
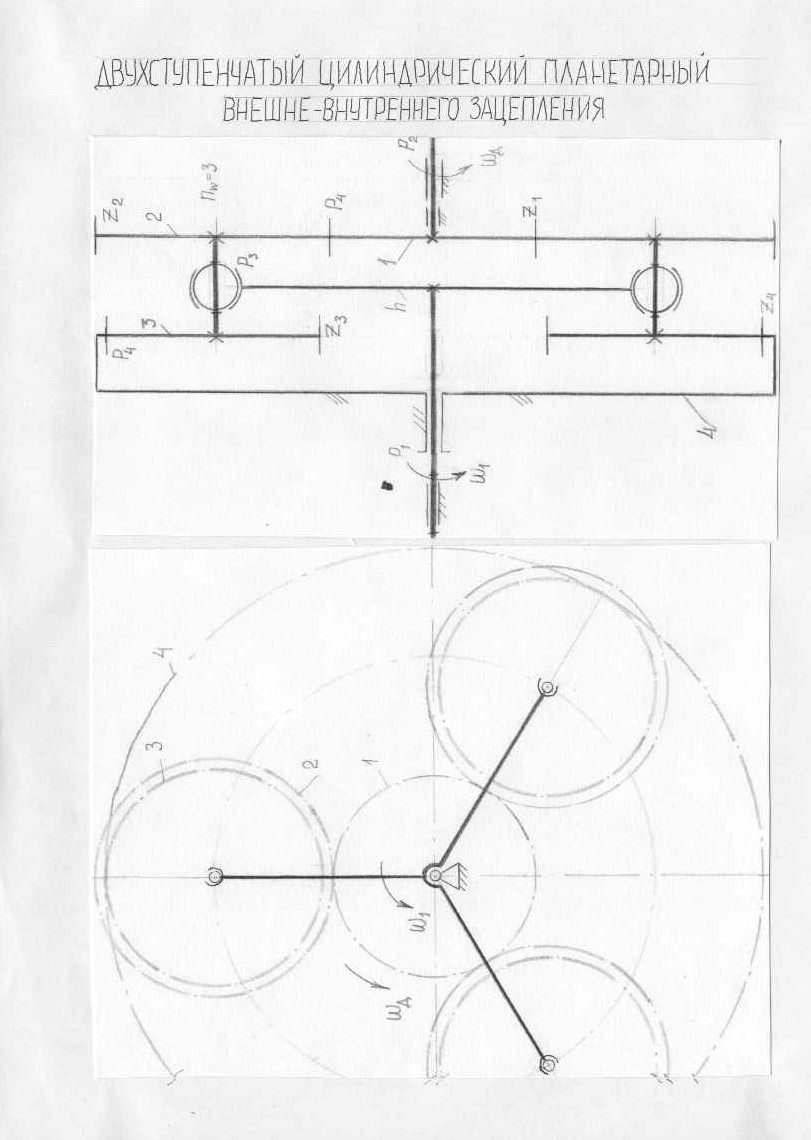
при u ≈ 20…70 – червячный; двухступенчатый цилиндрический внешнего зацепления; двухступенчатый цилиндрический внешне-внутреннего зацепления; двухступенчатый коническо-цилиндрический; цилиндрический планетарный нескольких выполнений (с внешней и внутренней ступенью, Давида – с двумя внешними ступенями, с двумя внутренними ступенями) и др.;
при u ≈ 70 и больше – червячный; трёхступенчатый цилиндрический внешнего зацепления; трёхступенчатый цилиндрический внешне-внутреннего зацепления; трёхступенчатый коническо-цилиндрический; цилиндрический планетарный нескольких выполнений (с механизмом Давида с внешней и внутренней ступенью, с двумя внешними ступенями, с двумя внутренними ступенями) и др.
2.8 Для обоснованного выбора рационального выполнения редуктора информации мало, поэтому предпочтение отдаём наиболее простому и дешёвому зубчатому цилиндрическому одноступенчатому редуктору с u20 ≈ 10 и среднеоборотному электродвигателю с ωДО = 157 1/с.
2.9 Максимально возможный коэффициент полезного действия одноступенчатого зубчатого цилиндрического редуктора ηР ≈ 0,97. При этом необходимая мощность двигателя составит величину:
PД = PК/ ηР = 3360/0,97 ≈ 3400 Вт.

2.10 По каталогу выбираем среднеоборотный электродвигатель переменного тока трёхфазный асинхронный единой серии А марки 4А100S4У3 с двумя парами полюсов с ближайшей к Рд номинальной мощностью РДН = 3000 Вт (перегрузка не превышает допустимых 12,5 %).
Его номинальная частота вращения nДН = 1435 об/мин, угловая скорость ωДН = π nДН/30 ≈ 150 1/с; маховый момент ротора GD2 = 3,47·10-2 кгс·м2; момент инерции массы IД ≈ 8,8 ·10-4 кг·м2; кратность пускового момента К = ТП/ТДН = 2.
2.11 Уточнённое значение передаточного числа редуктора:
uР = ωДН/ω1 = 150/15 = 10.
2.12 Необходимый движущий вращающий момент:
TД = PД / ωДН = 3400/150 ≈ 22,7 Н∙м
при номинальном движущем вращающем моменте TДН = PДН / ωДН =
3000/150 = 20 Н∙м. Двигатель будет работать с небольшой допустисой перегрузкой 11 %. Отношение TК/TД ≈ 224/22,7 ≈ 9,7 должно равняться произведению uР на ηР, равному ≈ 10∙0,97 = 9,7, что, практически, и имеет место.