

4. Исследование статических и динамических свойств замкнутой
системы управления с ПИ - регулятором
4.1 Моделирование в ewb 5.12
Передаточная функция ПИ – регулятора
![]()
где ТР = 1/KP - постоянная регулятора, Ти – время изодрома. При моделировании принять КР = 0.5. Электронная модель системы представлена на рис. 21, в которой модель регулятора собрана на усилителе у1. Значения С4пи и R2пи рассчитываются по формулам: С4пи =ТР/R1пи; R2пи =Ти/С4пи.
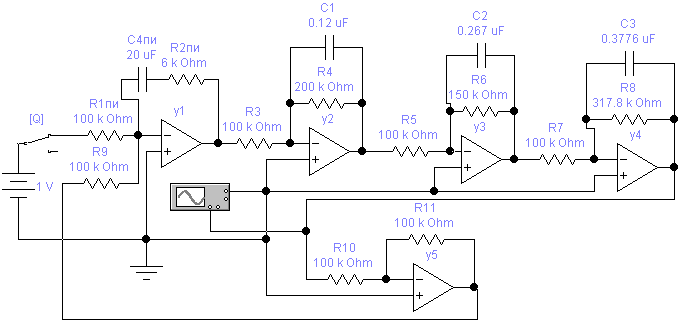
Рис. 21
Снять переходные (рис. 22) и частотные характеристики (рис. 23, 24) системы управления для Ти = Т1, Т2 и Т3. Определить время переходного процесса, перерегулирование, ошибку, частоту среза ωСР , значение фазы среза на этой частоте φСР, частоту переворота фазы ωπ , запас устойчивости по амплитуде ∆L и фазе ∆φ. Результаты эксперимента сравнить с предыдущими и свести в таблицу.
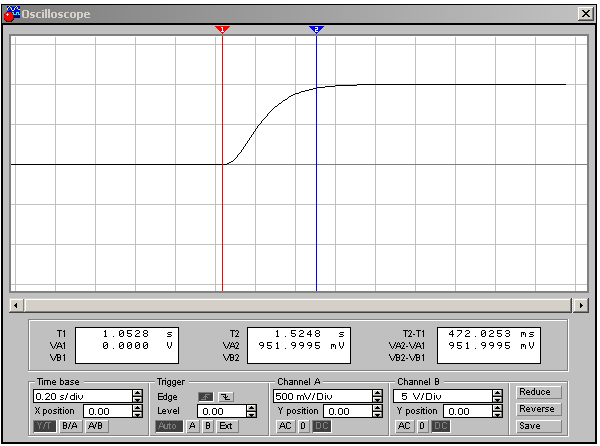
Рис. 22
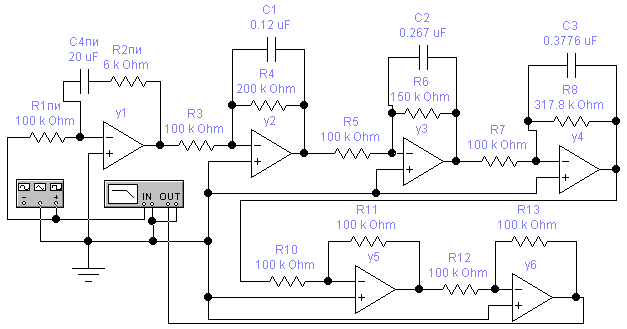
Рис. 23
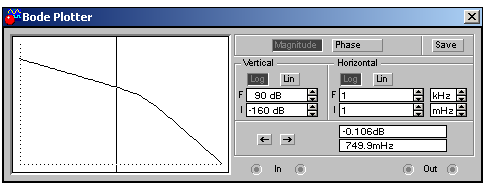
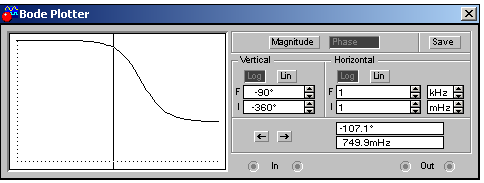
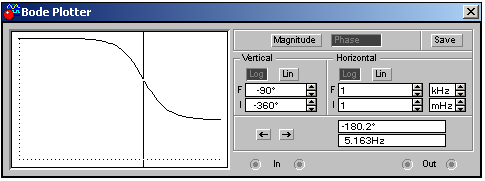
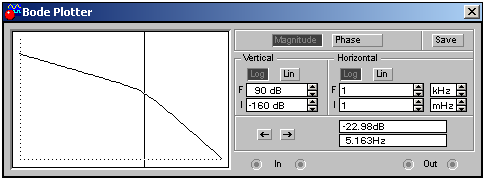
Рис. 24
4.2. Моделирование в MathCAD
Определить передаточные функции разомкнутой и замкнутой систем управления. Рассчитать временные и частотные характеристики системы. Учесть, что введение ПИ – регулятора с постоянной Ти компенсирует соответствующую постоянную апериодического звена объекта управления.
Определить время переходного процесса, перерегулирование, ошибку, частоту среза ωСР , значение фазы среза на этой частоте φСР, частоту переворота фазы ωπ , запас устойчивости по амплитуде ∆L и фазе ∆φ. Результаты эксперимента сравнить с предыдущими и свести в таблицу.
4.3. Моделирование в MATLAB.
Этот пункт выполнить аналогично п. 3.3.
В среде MATLB + Simulink создать структурную схему замкнутой системы управления (рис. 25) и снять кривые переходных процессов при различных значениях Т1ф. Сравнить полученные кривые с экспериментальными и расчётными.
Рис. 25
5. Исследование статических и динамических свойств замкнутой
системы управления с ПИД - регулятором
5.1 Моделирование в ewb 5.12
Передаточная функция ПИД – регулятора
![]()
реализована на усилителе у5 и у1 электронной модели системы управления (рис. 26).
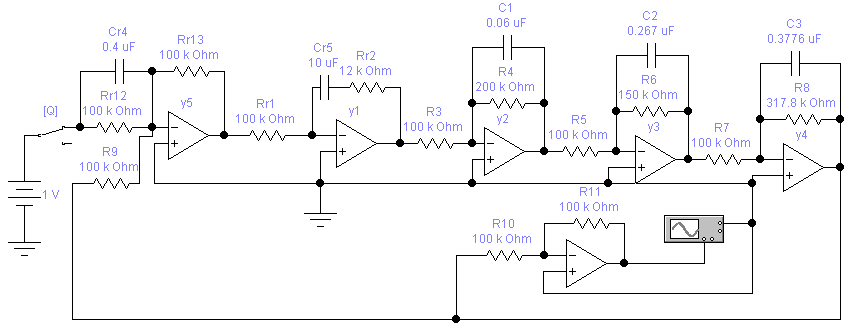
Рис. 26
Такая структура регулятора в соответствии с принципом компенсации позволяет компенсировать две наибольшие постоянные времени объекта управления – Т2 и Т3. При исследовании свойств ПИД – регулятора необходимо принять Т1р = Т2, Т2р = Т3, Т3р = 1с, Rr1 = Rr12 = 100 кОм. Значения элементов схемы регулятора рассчитываются по формулам:
![]()
При kp = 1 снять переходную (рис. 27) и частотные характеристики (рис. 28, 29) системы с ПИД – регулятором. Определить время переходного процесса, перерегулирование, ошибку, частоту среза ωСР , значение фазы среза на этой частоте φСР, частоту переворота фазы ωπ , запас устойчивости по амплитуде ∆G и фазе ∆φ. Повторить опыты для kp = 2.5 и 4. Результаты экспериментов свести в таблицу.
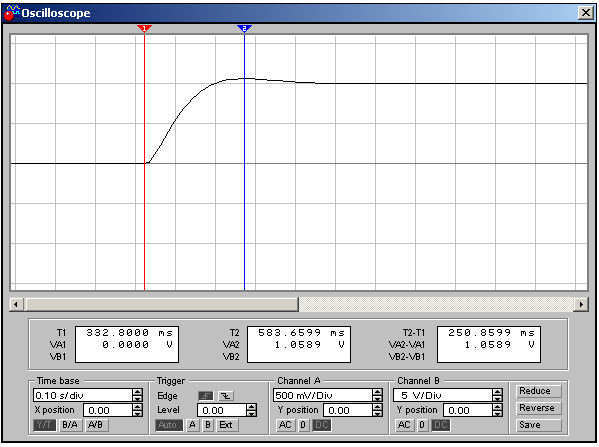
Рис. 27
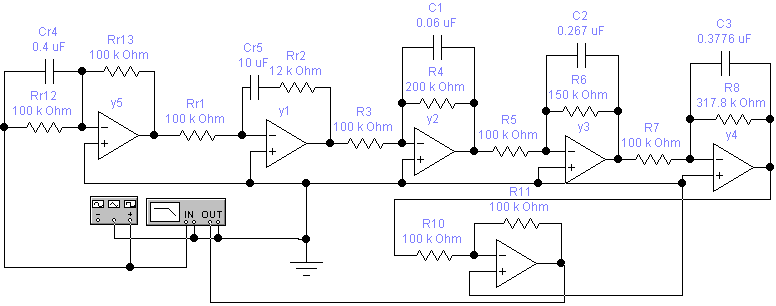
Рис. 28
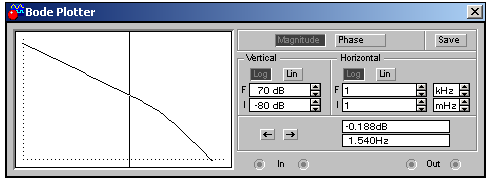
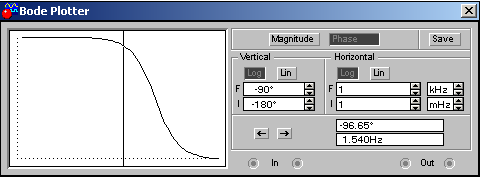
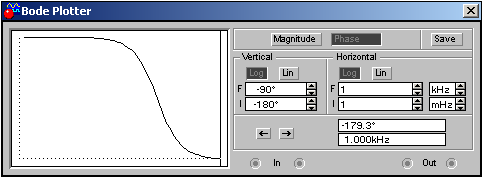
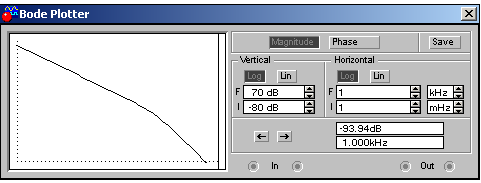
Рис. 29
5.2. Моделирование в MathCAD
Определить передаточные функции разомкнутой и замкнутой систем управления. Рассчитать временные и частотные характеристики системы. Учесть, что введение ПИД – регулятора компенсирует две постоянные времени объекта управления.
Определить время переходного процесса, перерегулирование, ошибку, частоту среза ωСР , значение фазы среза на этой частоте φСР, частоту переворота фазы ωπ , запас устойчивости по амплитуде ∆L и фазе ∆φ. Результаты эксперимента сравнить с предыдущими и свести в таблицу.
5.3. Моделирование в MATLAB.
В пакете MATLAB + Simulink имеется PID - Controller, передаточная функция которого равна
![]()
где Р – пропорциональная часть, I/s – интегральная часть и Ds – дифференциальная часть. Его можно создать также из соответствующих стандартных звеньев библиотеки Simulink.
Сравнение с регулятором в EWB приводит к следующим равенствам:
kp=I=1; kp*T1p*T2p = P= 0.16; kp*T1p*T2p=D =0.0048.
В среде MATLB + Simulink создать структурную схему замкнутой системы управления (рис. 30) и снять кривые переходных процессов при различных значениях kp. Сравнить полученные кривые с экспериментальными и расчётными.
Контрольные вопросы
Что является основными статическими и динамическими характеристиками объекта управления и системы управления в целом?
Почему нужна коррекция статических и динамических свойств объекта управления?
Дайте характеристику и сравнительную оценку основных видов коррекции.
Дайте характеристику типовых алгоритмов управления и типовых корректирующих устройств (регуляторов).
Приведите примеры частотных характеристик типовых регуляторов.
С помощью каких корректирующих устройств можно устранить статическую ошибку по заданию или возмущению?