

2.2.3. Подбор чисел зубьев планетарного редуктора
Передаточное отношение планетарного редуктора:

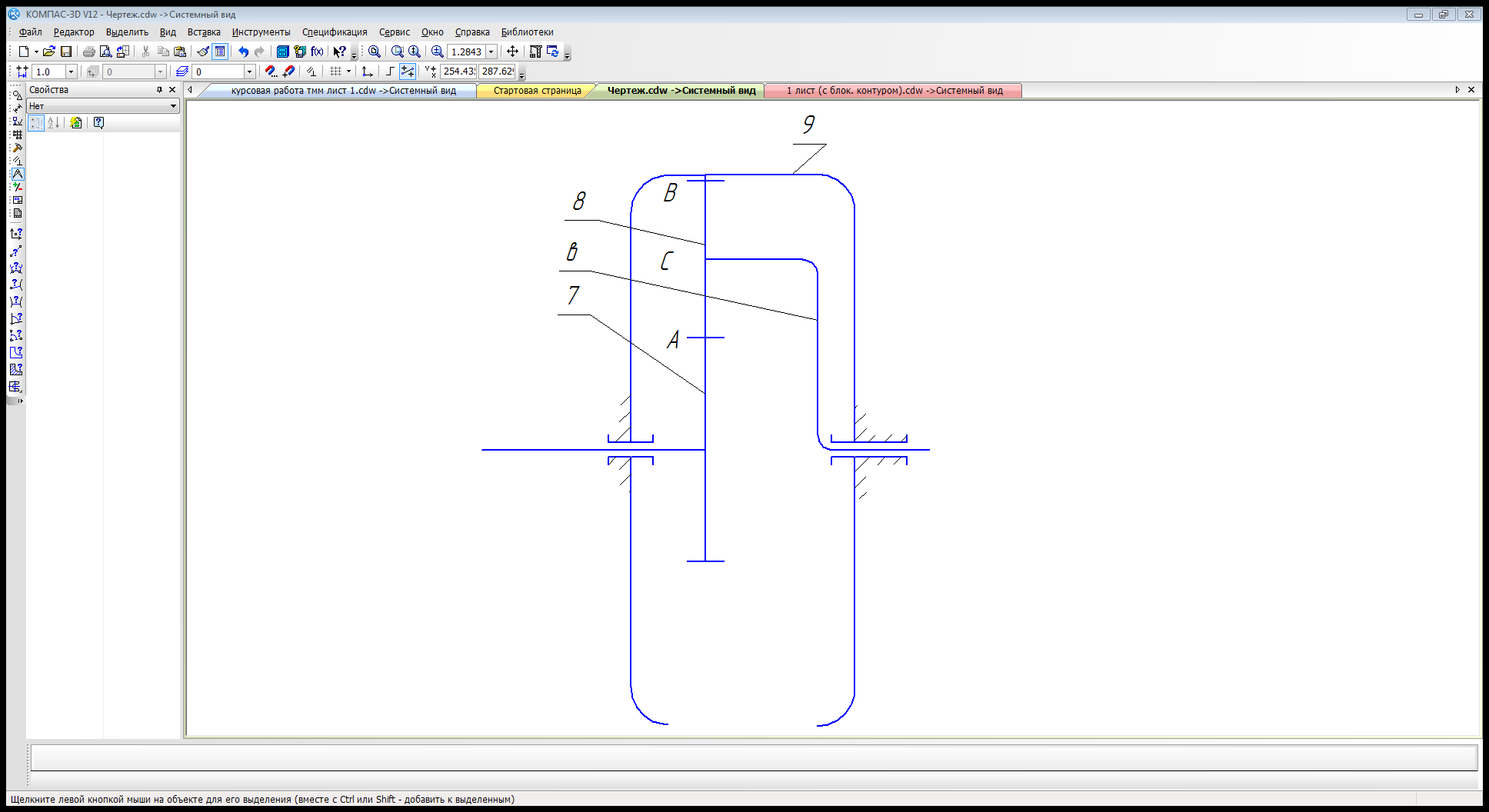
Схема механизма:

При подборе чисел зубьев учитываются ограничения накладываемые отсутствием подреза:
 ;
внутреннее зацепление малое колесо
;
внутреннее зацепление малое колесо
 ;
внутреннее зацепление большое колесо
;
внутреннее зацепление большое колесо
 ;
внешнее зацепление
;
внешнее зацепление
Т.е. для однорядного планетарного редуктора со смешенным зацеплением
 ;
;
 ;
;
Подберем число зубьев, учитывая все условия, накладываемые на многосателлитные редукторы:
1.
Формула Виллиса:
 ;
;
2.
Условие соосности:
 ;
;
3.
Условие сборки:
 ;
;
4.
Условие совместимости:

При P=33 Z7 – любое целое цисло.
Число зубьев находим перебором. Первое условие: Z7 должно быть больше 17. Второе условие Z9 должно быть больше 85, используя формулу Виллиса получаем выражение для Z9=U1в-1*Z7. Таким образом находим пару чисел 40 и 96. Пара подходит и получаем, что Z8=28.0,
Z7=40, Z8=28, Z9=96.
Проверка условия соосности:
40+28=96-28; 68=68; верно.
Проверка условия совместимости:
 верно.
верно.
В результате расчета подобраны числа зубьев колес однорядного планетарного редуктора со смешанным зацеплением, удовлетворяющие всем условиям. Накладываемым на многосателлитные редукторы:
Z7=40, Z8=28, Z9=96.
2.2.4. Графическая проверка передаточного отношения
1.
Расчет радиусов колес планетарного
редуктора:

Где ri – радиус iого колеса редуктора,
m – модуль.



2.
Построение схемы планетарного редуктора
в масштабе
 .
.
3. Проверка передаточного отношения (графически из распределения линейных скоростей).
Для построения распределения линейных скоростей на схеме редуктора отмечаются характерные точки: центры колес и точки зацеплений. Все отмеченные точки выносятся на вертикальную ось радиусов.

Откладываем
отрезок AA’=80мм
в масштабе
 Отрезок OA’-
линию распределения скоростей 1 звена
(лрс1). Скорость VC
=0. Строим линию распределения скоростей
блока сателлитов (лрс2-3). Строим отрезок
BB’=40мм,
в масштабе
Отрезок OA’-
линию распределения скоростей 1 звена
(лрс1). Скорость VC
=0. Строим линию распределения скоростей
блока сателлитов (лрс2-3). Строим отрезок
BB’=40мм,
в масштабе
 .
Скорость точки B=10м/с.
Отрезок OB’-
линия распределения скоростей водила
(лрсв).
.
Скорость точки B=10м/с.
Отрезок OB’-
линия распределения скоростей водила
(лрсв).
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
4. Проектирование передаточного отношения (графически из плана угловых скоростей).
Для
построения плана угловых скоростей
проводим горизонтальную линию угловых
скоростей. Выбираем полюс р на расстоянии
37 мм от нее, проводим из него лучи
параллельные линиям распределения
скоростей до пересечения с осью. Отрезки
kaв,
ka1,
ka2-3
выражают в масштабе
 угловые скорости соответствующих
звеньев.
угловые скорости соответствующих
звеньев.
 ,
,
 ,
,
 ,
,
 .
.
2.2.5. Выводы
В результате расчета подобраны числа зубьев колес двухрядного планетарного редуктора со смешанным зацеплением, удовлетворяющие всем условиям, накладываемым на многосателлитные редукторы:
Z7=40, Z8=28, Z9=96.
Передаточное отношение проверено графически с помощью графиков угловых и линейных скоростей. Погрешность составляет
 ,
,

3. Лист II. Динамические исследование основного механизма двухцилиндрового четырехтактного двигателя внутреннего сгорания.
3.2.1 Исходные данные и постановка задачи.
1 |
Средняя скорость поршня |
(υВ)ср;(υВ’)ср |
м/сек |
10,26 |
2 |
Диаметр цилиндра |
d |
м |
0,08 |
3 |
Отношение длины шатуна |
|
- |
4 |
4 |
Отношение расстояния от центра тяжести шатуна до точки А к длине шатуна |
|
- |
0,25 |
5 |
Число оборотов коленчатого вала двигателя при номинальной нагрузке |
|
Об/мин |
4400 |
6 |
Число оборотов коленчатого вала при холостом режиме |
|
Об/мин |
1600 |
7 |
Масса шатуна |
m2, m4 |
кг |
0,36 |
8 |
Масса поршня |
m3,m5 |
кг |
0,38 |
9 |
Момент инерции шатуна относительно оси, проходящей через центр тяжести шатуна |
|
кг*м2 |
0,002 |
10 |
Максимальное давление в цилиндре двигателя при номинальной нагрузке |
(pmax)ном |
Па |
28,8*105 |
11 |
Максимальное давление в цилиндре двигателя при холостом режиме |
(pmax)xx |
Па |
10,8*105 |
12 |
Коэффициент неравномерности вращения коленчатого вала при холостом режиме |
δ |
- |
1/25 |
13 |
Момент инерции коленчатого вала (без маховика) |
|
кг*м2 |
0,006 |
14 |
Угловая координата кривошипа для силового расчета |
φ1 |
град |
30 |
Необходимо:
1. Провести геометрический синтез механизма.
2. Создать динамическую модель и определить момент полезного сопротивления на установившемся режиме.
3. Получить закон движения главного вала машины
4. Рассчитать маховик