

3.8. Расчет маховика
Назначение маховика: уменьшить неравномерность вращения.







Где
 м/м^3
м/м^3
b = 0.3 D , d=0.7 D
D
=
Тогда
b=0,3 0,21=0.063;
d=0.7
0,21=0.063;
d=0.7 0.147м
0.147м
Исходя из полученного значения выбираем масштаб 500
4 Лист 3 Проектирование кулачкового механизма
4.1 Исходные денные и постановка задачи
1. Схема: кулачкового механизма с коромысловым толкателем
2. Ход толкателя кулачкового механизма h=0.0067 м
3.
Угол рабочего профиля кулачка выпускного
клапана

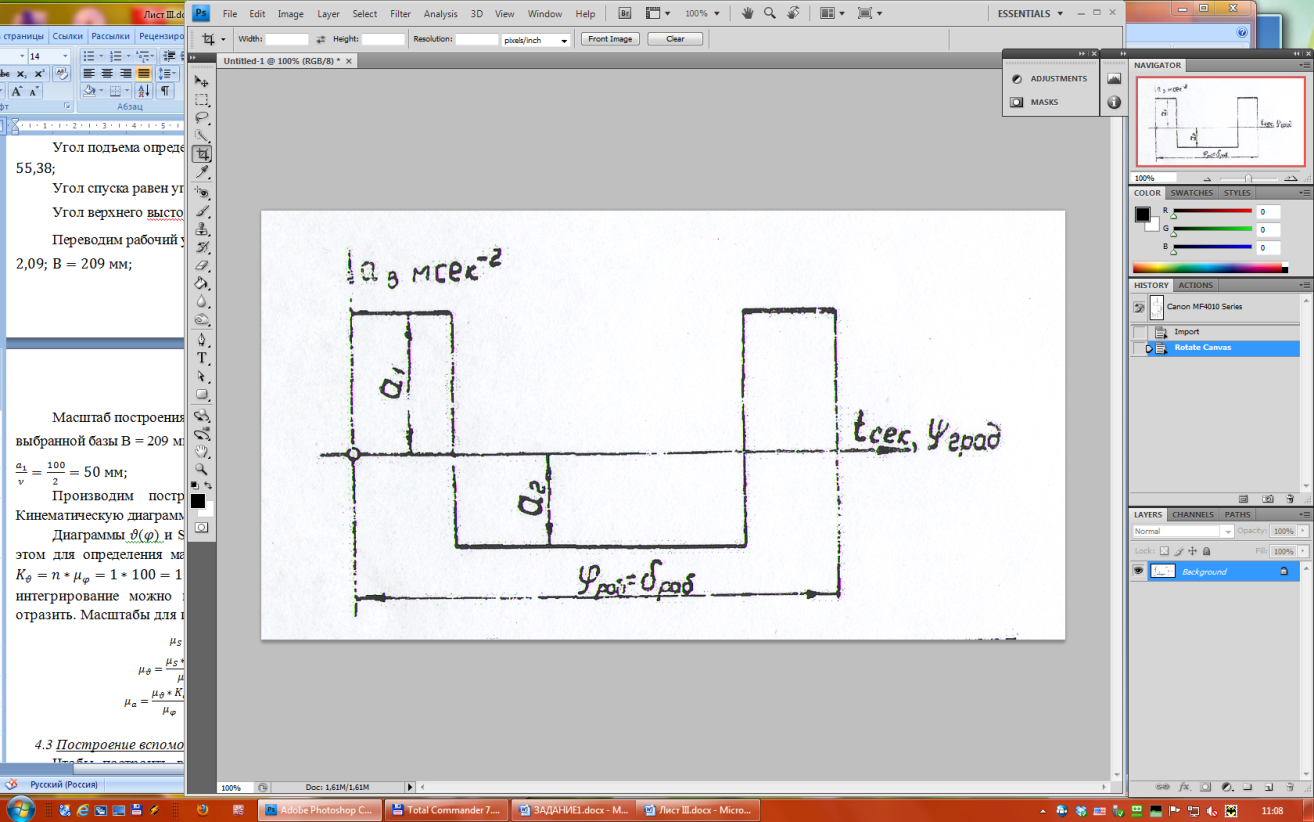
4. вид диаграммы
5.

6.
Максимальный допустимый угол давления
в кулачковом механизме

7.
длина коромысла
 м
м
8.
Отношение
величин ускорений толкателя

Задача
1. Спроектировать кулачковый механизм минимальных размеров.
2. Проверить кинематическую диаграмму передаточных функций.
4.2 Построение кинематической диаграммы
Если
,
то выбираем

Перевод
рабочего угла в радианы

Угол
подъема равен углу спуска и определяем
как
 0
0
Тогда
 0
0
Масштаб
построения графиков по оси
 рассчитываем исходя из выбранной базы
В=240 мм,
рассчитываем исходя из выбранной базы
В=240 мм,
 ,
,

Производим
построение заданной кинематической
диаграммы. Кинематическую диаграмму
делим на N
= 22 равных части.
 .
.
Диаграммы
 (
)
и S(
)
получаем графическим интегрированием,
при этом для определения масштаба
выбираем отрезок интегрирования
(
)
и S(
)
получаем графическим интегрированием,
при этом для определения масштаба
выбираем отрезок интегрирования
 За счет симметричности диаграмм,
интегрирование можно проводить на фазе
подъема и, затем, симметрично отразить.
Масштабы для построения рассчитываем
следующим образом:
За счет симметричности диаграмм,
интегрирование можно проводить на фазе
подъема и, затем, симметрично отразить.
Масштабы для построения рассчитываем
следующим образом:



4.3 Построение вспомогательной диаграммы
Чтобы
построить вспомогательную диаграмму,
для каждой точки откладываем по оси s
расстояние
 с графика s(
),
а по оси
откладываем
расстояние
с графика s(
),
а по оси
откладываем
расстояние
 с
графика
с
графика
 )
) .
Полученные точки соединяем плавной
кривой. Для нахождения центра вращения
кулачка проведем две прямые под углом
.
Полученные точки соединяем плавной
кривой. Для нахождения центра вращения
кулачка проведем две прямые под углом
 к вертикали в крайних точках кривой. В
точке их пересечения будет находиться
центр вращения кулачка с минимальными
размерами. Ниже находится область
возможных расположений центров кулачка
(ОВР).
к вертикали в крайних точках кривой. В
точке их пересечения будет находиться
центр вращения кулачка с минимальными
размерами. Ниже находится область
возможных расположений центров кулачка
(ОВР).


 Диагламма
состоит из линии спуска и линии подъема.
Диагламма
состоит из линии спуска и линии подъема.
4.4 Проверка кинематических диаграмм
Для проверки кинематических диаграмм необходимо выбрать положение, в котором передаточная функция определена однозначно. Выбираем положение 18.
Построение замыкающего механизма
Для выбранного положения механизма соединим хордами 2 соседних с ним положения 3-4, 4-5. В середине каждой хорды восстанавливаем перпендикуляр. Точка пересечения перпендикуляров даст положение шарнира А. Заменяющий механизм шарнирный четырехзвенник, где ОА – кривошип, АВ – шатун. СВ – кривошип.
4.5.Проверка
передаточной функции скорости
 TA \l "4.5.Проверка
передаточной функции скорости
"
\s "4.5.Проверка передаточной функции
скорости ,𝒗-𝒒𝒃." \c 1
TA \l "4.5.Проверка
передаточной функции скорости
"
\s "4.5.Проверка передаточной функции
скорости ,𝒗-𝒒𝒃." \c 1
рa = OA = 37,06 мм;


Поворачиваем план скоростей на 90 градусов в сторону, противоположную вращению кулачка.
Тогда



 .
С учетом того, что кулачок построен в
масштабе
.
С учетом того, что кулачок построен в
масштабе =
2988
=
2988

4.6.Проверка
передаточной функции ускорения
 TA \l "4.6.Проверка
передаточной функции ускорения
"
\s "4.6.Проверка передаточной функции
ускорения ,𝒂-𝒒𝒃." \c 1
TA \l "4.6.Проверка
передаточной функции ускорения
"
\s "4.6.Проверка передаточной функции
ускорения ,𝒂-𝒒𝒃." \c 1
qa = OA = 37.06 мм;
т.
к
 то
то



Поворачиваем план скоростей на 180 градусов.
Тогда




Получаем

