

Технико-экономическое обоснование
Технико-экономическое обоснование
Описание производственной ситуации.
Примером применения манипуляционного робота в сервисной области является проект FRIEND Бременского университета (рис. 1.1.1). Робот FRIEND предназначен для обслуживания парализованных пациентов или людей, находящихся на лечении.
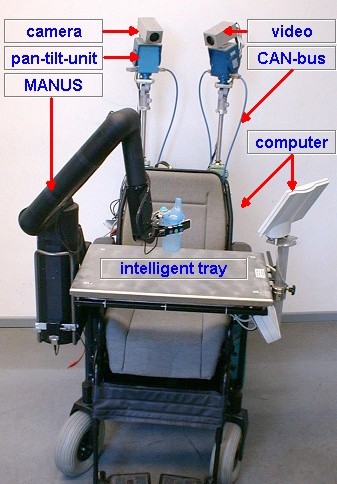
Рис. 1.1.1 FRIEND
При обслуживании парализованных пациентов типична следующая ситуация. На столе перед парализованным пациентом стоят стаканы, бутылки, апельсины, яблоки и другие предметы, к столу прикреплен также манипулятор. Пациент, например, может попросить стакан воды. Манипулятор должен осуществить следующие действия: передвинуться среди неизвестных препятствий к бутылке, наполнить стакан водой вставить в стакан трубочку и подать стакан. Одной из проблем реализации проекта является управление манипулятором в среде с неизвестными препятствиями, где под неизвестными статическими препятствиями понимают все окружающие предметы, находящиеся в области действия манипулятора (стол, фрукты и т.д. включая самого парализованного пациента). К настоящему времени разработано большое количество алгоритмов управления роботами в известной среде. Имеются хорошие обзоры таких алгоритмов [3, 4, 6, 8]. В качестве алгоритма управления манипулятором в неизвестной среде выбран алгоритм [Ильин, Лопатин] по следующим соображениям: применимость к n-мерному случаю, гарантированность достижение целевой конфигурации при условии ее принципиальной достижимости. Данный алгоритм сводится к решению конечного числа задач планирования траектории в среде с известными запрещенными состояниями [6]. Ранее было разработано программное обеспечение задачи моделирования движения двухзвенного манипулятора в неизвестной среде. В качестве подпрограммы планирования траектории в среде с известными запрещенными состояниями был использован метод [9] полного перебора [Нильсон]. Тестирование на примере (см. прил. 1) показало, что, несмотря на то, что цель достигалась всегда, с уменьшением размера дискретов время движения становится неприемлемо большим (Табл. 1.1). В связи с этим возникает необходимость выбора других алгоритмов планирования траектории в среде с известными запрещенными состояниями. В целях уменьшения времени работы в качестве планирования траектории в известной среде вызываемой из точного алгоритма был выбран алгоритм Лавалля - двунаправленных графов [11].
Таблица 1.1
№ |
delta, ˚ |
Количество дискретов |
Время, секунд |
1 |
12 |
30 |
3 |
2 |
9 |
40 |
9 |
3 |
8 |
45 |
15 |
4 |
6 |
60 |
35 |
5 |
4.5 |
80 |
95 |
6 |
4 |
90 |
133 |
7 |
3 |
120 |
494 |
8 |
2 |
180 |
4926 |
9 |
1.5 |
240 |
16483 |
Задача дипломного проекта – разработать и реализовать на ЭВМ алгоритм движения манипулятора в среде с известными статическими препятствиями, используя алгоритм двунаправленных графов такой, чтобы время вычисления искомого маршрута было меньше времени вычисления с использованием алгоритма полного перебора в зависимости от задаваемого шага дискретизации delta для того же случая.