

Министерство образования РФ
СЕВМАШВТУЗ
Кафедра №6
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
По выполнению лабораторной работы №9
«Исследования комбинированного стабилизатора переменного напряжения»
по дисциплине «Полупроводниковые преобразователи»
Индекс в соответствии с У.П.2000 г. Количество часов – 2 часа
ДС 05 специальность 140400
Северодвинск
2001
ИССЛЕДОВАНИЕ КОМБИНИРОВАННОГО СТАБИЛИЗАТОРА ПЕРЕМЕННОГО НАПРЯЖЕНИЯ.
1. ЦЕЛЬ РАБОТЫ.
Целью работы является исследование зависимости выходного напряжения от входного и типа подключаемой нагрузки к комбинированному стабилизатору переменного напряжения.
2. ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ.
2.1. Способы управления электронными регуляторами
Электронные регуляторы (ЭР) являются одним из наиболее распространенных видов электронных устройств промышленной автоматики. Они предназначены для регулирования действующего и среднего значения переменного и постоянного напряжения на нагрузке или мощности нагрузки. Как элементы системы автоматического управления (рис. 2.1) они преобразуют в упорядоченный поток энергии те сигналы, которые вырабатываются логической информационной частью САУ на основании информации о состоянии объекта.

Рис.2.1.
Сами электронные регуляторы могут быть как разомкнутой, так и замкнутой системой автоматического регулирования, но своему выходному параметру — напряжению, току или мощности. Это иллюстрируется структурной схемой ЭР (рис. 2.2), где канал обратной связи служит для измерения выходной величины ЭР (напряжения, мощности) и предотвращения ее отклонения от требуемой, определяемой сигналом управления Xy (режим стабилизации) или изменения ее по требуемому закону (вывод на режим, программное управление). Такая структура ЭР позволяет исключить из основного контура управления отработку быстроизменяющихся возмущений, связанных непосредственно с изменением подводимых к объекту управления напряжения, тока или мощности. В настоящее время наиболее широкое применение получили электронные регуляторы переменного напряжения. Эти регуляторы подключаются непосредственно к промышленной сети переменного напряжения, например, для регулирования скорости однофазного двигателя постоянного тока, причем & этих схемах могут использоваться как не полностью, так и полностью управляемые (запираемые) ключи. Согласно структурной схеме (см. рис. 2.2) электронные регуляторы представляют собой сочетание силовой части в виде ИО и схемы управления. Основные свойства этих ЭР определяются способами управления ИО, которые реализуются схемой управления.

Рис. 2.2
Благодаря ключевым характеристикам тиристоров регулирование мощности или напряжения на нагрузке осуществляется за счет дискретного изменения его формы или амплитуды. Поэтому все способы управления можно разделить на четыре основные группы:
изменением формы напряжения на нагрузке в пределах каждого отдельного полу периода сетевого напряжения;
изменением числа полу периодов напряжения на нагрузке;
ступенчатым изменением амплитуды подключаемого напряжения без искажения его синусоидальной формы;
комбинированное управление — одновременным изменением числа полу периодов и формы напряжения или амплитуды. Классификация способов управления ЭР показана на рис. 2.3.
Основным достоинством способов управления, связанных с изменением формы напряжения на нагрузке в пределах каждого отдельного полу периода, является то, что выходная характеристика, но среднему или действующему значению ЭР при непрерывном сигнале управления непрерывна. В силу этого регуляторы, реализующие эти способы управления, обладают минимальной инерционностью и запаздыванием контура управления, приводят к минимальным пульсациям напряжения на нагрузке, являются наиболее высокочастотными, так как позволяют регулятору работать на сетевой частоте и более высоких частотах. Однако им присущи и некоторые недостатки: высокий уровень импульсных помех в сети и радиопомех из-за больших скоростей переключения и значительных амплитуд коммутируемых токов и напряжений; необходимость выключения тиристоров ИО для способов с принудительной коммутацией тиристоров;
реактивный характер потребляемой мощности даже при чисто активной нагрузке вследствие искусственно вносимого фазового сдвига тока нагрузки относительно напряжения сети.
Рассмотрим ряд таких способов управления, для которых типичные искаженные формы напряжений на нагрузке изображены на рис. 2.4. В соответствии с классификацией (рис.2.3) эти способы разделены на две группы: импульсные и релейные (с вольтодобавкой).

Рис. 2.3
Импульсные способы предусматривают изменение формы напряжения в течение полу периода сетевого напряжения между огибающей последнего и нулевым уровнем без промежуточных значений (рис. 2.4, а - е.). В свою очередь импульсные способы можно разделить на способы с односторонней (рис. 2.4, а, б), двухсторонней (рис. 2.4, в, г, д.) и многократной (рис. 2.4, е.) коммутациями в течение полу периода. Импульсные способы с односторонней коммутацией подразделяются на управление с отставанием фазы тока в нагрузке от фазы напряжения сети (рис. 2.4, а) 0 и управление с опережающей фазой тока (рис. 2.4, б) >0, причем и соответственно углы включения и выключения тиристоров ИО. В первом случае активная нагрузка приобретает индуктивный, а во втором - емкостной характер, что сказывается на эффективности использования
электроэнергии системой регулятор - нагрузка.
Способ управления с >0 (фазовое управление) получил, распространение благодарят хорошим параметрам регулировочной характеристики и относительной простоте технической реализации. Однако он имеет тот недостаток, что при управлении энергоемкими объектами вследствие искусственно вносимого индуктивного характера нагрузки, т. е. отставание угла фазового сдвига основной гармоники тока в нагрузке относительно фазы напряжения, возникает большая реактивная составляющая мощности индуктивного характера, уменьшающая коэффициент мощности регулятора. Способ управления с >0 вносит реактивную составляющую с емкостным характером нагрузки и может использоваться для частичной компенсации индуктивного характера потребителей электроэнергии. Однако при технической реализации этого способа ЭР нуждаются в узлах принудительного выключения тиристоров (что технически достаточно сложно, в особенности для низкоомной нагрузки), что сопряжено с дополнительным расходом энергии в коммутирующих цепях, и приводит к снижению к. п. д. ЭР.
Широко используются способы управления с двухсторонней коммутацией тиристоров, в особенности с симметричным управлением (рис.2а, в) =, позволяющим уменьшить искусственно вносимую реактивную составляющую нагрузки при сохранении положительных качеств способов управления с >0 и >0.
Импульсные способы с многократным подключением нагрузки к сети в течение полу периода питающего напряжения (рис. 2.4, е.) подразделяются на широтно-импульсные. (ШИУ) и частотно-импульсные (ЧИУ). Для ШИУ частота подключения нагрузки к сети постоянна и кратна частоте питающей сети, а время подключения (скважность импульсов напряжения или тока) изменяется в зависимости от сигнала Ху. При ЧИУ время подключения нагрузки неизменно, а частота подключения зависит от значения сигнала Ху. Способы с многократной коммутацией широка, используются дня управления объектами с индукционным высокочастотным нагревом, а также для преобразования, частоты. Они также применяются для широтно-импульсного регулирования постоянного напряжения.
С точки зрения согласования частот сетевого напряжения и коммутации тиристоров ИО все рассмотренные импульсные способы управления ЭР подразделяются в синхронные и асинхронные. Первые характеризуются синхронностью моментов включения и выключения тиристоров с моментами перехода через нуль напряжений (токов) питающей сети. При асинхронном управлении отсутствует синхронизация моментов коммутации тиристоров с сетевым напряжением, а отсчет углов коммутации или производится от моментов их предыдущего формирования в соответствии со значением регулируемого выходного параметра регулятора или его изменением за время, истекшее с момента предыдущей коммутации.
Импульсные способы управления с искусственной однократной (двухсторонней) коммутацией могут быть и условно-синхронными, т. е. синхронизация осуществляется посредством задания значений угла включения = 0 или = 0 = const на основании анодного напряжения каждого тиристора, а изменение угла выключения достигается введением в закон регулирования суммарного (интегрального) значения выходного параметра регулятора (тока, напряжения) за определенное время его работы. Способы управления с многократной коммутацией, как правило, являются асинхронными или условно синхронными. Для способов с двусторонней коммутацией может применяться синхронизация комбинированного типа:
как с сетевым напряжением относительно моментов его максимума, т. е. с углами 0 = 90°, 270°, ... (рис. 2.4, в), так и с действующим значением выходного параметра для обеспечения симметричного управления = регулятором. При широтно-импульсном регулировании постоянного напряжения управление, естественно, асинхронное.
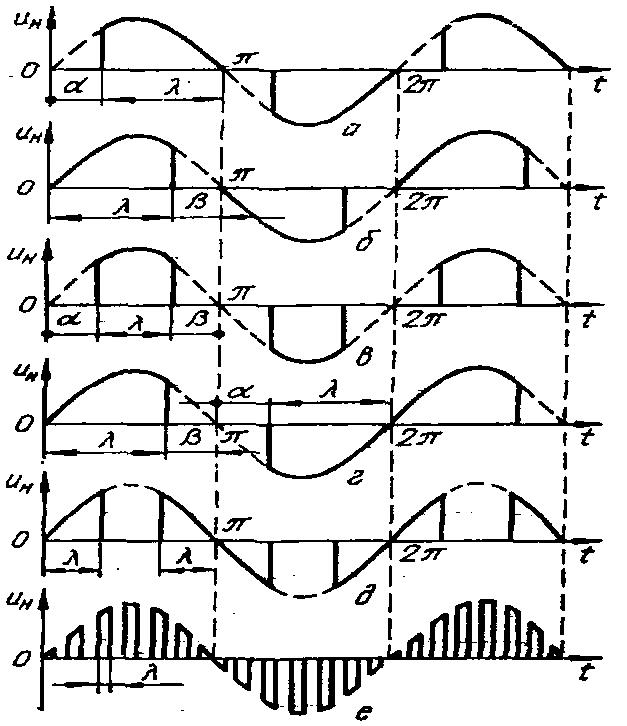
Рис. 2.4.
В зависимости от соотношения частоты изменения мгновенного значения выходного параметра ЭР (например, первой гармоники тока нагрузки) fн и частоты сети fс = 2/Тс рассмотренные способы с одно и двухсторонней коммутацией относятся к способам управления на основной (сетевой) частоте (ИУ-04), так как для них fс=fн а способы с многократной коммутацией — к высокочастотным (ИУ — ВЧ), поскольку при этом управлении fн>fc. При релейном и релейно-импульсном управлениях напряжение на нагрузке, может изменяться в течение каждого полупериода сетевого напряжения между несколькими уровнями, отличными от нуля и задаваемыми при помощи так называемых схем ИО с вольт добавкой, т. е. ИО, содержащих тиристорные ключи и трансформаторы, обмотки которых выполняются секциями или с отпайками.
Достоинством релейного управления является существенно меньший уровень помех и искажений сетевого напряжения при относительно лучших энергетических характеристиках. Включение тиристоров при релейном управлении осуществляется в моменты перехода напряжения через нуль, а выключение — при изменении полярности напряжения, поэтому высокочастотные помехи практически отсутствуют, и нет необходимости в цепях запирания тиристоров. Наличие силовых трансформаторов с отводами (отпайками) и относительно большое количество дополнительных силовых ключей в ИО, включаемых последовательно в каждый отвод (отпайку) трансформатора, являются недостатками релейного способа управления. Разновидности релейных способов управления аналогичны рассмотренным вариантам импульсных способов.
Способы управления регуляторами переменного напряжения за счет изменения числа полу периодов подключаемого к нагрузке напряжения сети составляют большую группу. Минимальной единицей изменения выходного параметра является один или несколько полу периодов напряжения сети или часть полу периода, сформированная в соответствии с любым из рассмотренных способов управления. Способы управления здесь можно разделить на два вида: импульсные и комбинированные.
При импульсных способах управления выходной параметр квантуется по двум уровням: один из них нулевой, а второй соответствует; прямому подключению нагрузки к сети (рис. 2.5). Эти способы подразделяются на широтно-импульсные (ШИУ), времяимпульсные (ВИУ) и кодоимпульсные (КИУ). Если под импульсом понимать единовременную посылку энергии с постоянными параметрами, то при ШИУ изменяется длительность посылки импульсов, а частота их следования постоянна (рис. 2.5, б). При ВИУ изменяется интервал времени между импульсами, длительность которых постоянна (рис. 2.5, а). При КИУ изменяется распределение в соответствии с сигналом управления числа импульсов внутри постоянного или регулируемого интервала времени, называемого периодом регулирования выходного параметра ЭР (рис. 2.5, в).
При кодоимпульсном управлении нагрузку многократно подключают к сети в течение периода регулирования Тр с постоянной длительностью каждого включения Ту. Число подключений соответствует значению сигнала управления Ху, поэтому способы КИУ называют также числоимпульсным управлением (ЧСИУ). Одной из основных характеристик ЧСИУ является закон распределения подключений нагрузки; по интервалу Тр, изменением которого можно улучшать энергетические характеристики регулятора и повышать качество управления его выходным параметром. Возможны и комбинированные способы импульсного управления. Так, при частотно-широтно-импульсном управлении одновременно изменяются число и частота следования импульсов, при частотно-импульсном — длительность интервала Тр и число наилучшим образом распределенных по этому интервалу импульсов. Эти способы позволяют корректировать энергетические характеристики ЭР и обеспечивают требуемое качество управления при минимуме высокочастотных помех. При этом в ряде случаев могут реализовываться необходимые сложные зависимости между сигналом управления и выходным параметром регулятора.
В зависимости от закона чередования и знаков полуволн напряжения на нагрузке импульсные способы подразделяются на способы со знакочередующимися (рис. 2.6, в) и произвольными (рис. 2.6, г) полуволнами. В первом случае постоянная составляющая тока в силовой цепи исключена, во втором она может присутствовать. По длительности каждого импульса можно выделить способы с многополупериодным (рис. 2.6, а, д), двухполупериодным (рис. 2.6, б) и однополупериодным (рис. 2.6, в, г) управлениями. При ШИУ реализуется только многополупериодное, а при ВИУ и ЧСИУ — любое управление.

Рис.2.5 Рис.2.6.

Рис.2.7. Рис.2.8
Представим структурную схему ЭР с импульсным управлением согласно рис. 2.7 в виде двух последовательно соединенных импульсных элементов ИЭ1 и ИЭ2 и блока перемножения БУ [З]. Элемент ИЭ1 преобразует сигнал управления Ху в последовательность сигналов включения и выключения тиристоров ИО, количественно характеризуемых частотой /н и продолжительностью включения 1и. При ограничении моментов включения и выключения тиристоров соответственно углами и исполнительный орган будет выполнять команды ИЭ1 с временным сдвигом, вносимым элементом ИЭ2. Частота следования сигналов кратна двойной частоте сети 2fc, а фаза зависит от характера нагрузки и способа управления. Если ограничение на углы АЛ и БЕ не накладываются, то элемент ИЭ2 не нужен. Такое представление ЭР позволяет классифицировать способы управления ими, но соотношению частоты сигналов управления с частотой питающей сети.
В зависимости от соотношения фаз и частот переключения импульсных элементов импульсные способы управления подразделяются на синхронные и асинхронные. При синхронном управлении частота следования сигналов ИЭ2 равна 2fc, при асинхронном - частоты переключения ИЭ1 и ИЭ2 могут быть различными, но кратными (однократное синфазное управление) или дополнительно могут совпадать моменты возникновения кратных импульсов (многократное синфазное управление). По отношению частоты изменения выходного параметра к частоте fc рассмотренные способы являются низкочастотными (ИУ—НЧ), так как fнfc.
Способы ИУ — НЧ находят все более широкое применение в тех объектах управления, для которых, прежде всего, важно количество подводимой энергии, а форма ее не имеет принципиального значения, т. е. объекты с хорошими инерционными свойствами. Наиболее распространенным классом таких объектов является электротермическое оборудование. Способы ИУ-НЧ, как и релейные, отличаются малым уровнем высокочастотных помех (вследствие коммутации тиристоров при условии =0 и =0)и возможностью синхронной работы нескольких ЭР одновременно с взаимной компенсацией искажающих воздействия ЭР на питающую сеть. При этом ИО для реализации этих способов очень просты и не требуют специальных трансформаторов. При использовании способов ИУ — НЧ в тиристорных регуляторах возможно объединение функций регулятора выходного напряжения и трансформатора действующего напряжения сети (за счет увеличения интервала между отдельными импульсами энергии). При этом исчезает необходимость в силовых согласующих трансформаторах для некоторых электроустановок, например электропечей сопротивления. Наряду, с этим способы ИУ-НЧ обеспечивают для широкого класса технологических процессов высокое качество регулирования различных технологических параметров (например, температуры, давления, мощности).
Комбинированные (релейно-импульсные) способы управления предусматривают одновременное использование импульсного и релейного управлений. Функциональная схема релейно-импульсного регулятора (рис. 2.8) содержит схему управления (СУ), состоящую из релейного блока переключателей (БП), блока импульсной модуляции (БИМ) и ИО. При подаче на СУ задающего воздействия Ху, соответствующего требуемому значению коэффициента передачи Ку, БП обеспечивает коммутацию ключей, обусловливающую меньшее ближайшее значение коэффициента передачи Кn:
Kn+1 K уKn (2.1)
и выделяет сигнал Ху, соответствующий отклонению Ку от Кп. Отклонение Ху поступает на БИМ, который более точно регулирует напряжение межлу двумя уровнями (2.1).
При чисто релейном регулировании в схеме (рис. 2.6) отсутствует БИМ и СУ включает ключ, обеспечивающий ближайший к заданному уровень квантования напряжения. При этом коэффициенты передачи по мгновенному ki и действующему Кп напряжениям совпадают,
K=Ki=Kn (2/2)
а характеристика регулирования uh=f(Xy) ступенчата. Уменьшения дискретности можно достичь только увеличением числа уровней квантования коэффициента передачи ИО. При импульсном управлении БП по сигналу с БИМ выполняет переключение между двумя уровнями, один из которых нулевой, при этом качество регулирования определяется показателями модулятора.
При комбинированном релейно-импульсном регулировании коэффициент передачи, токи и напряжения могут быть разложены на непрерывную и импульсную составляющие. Непрерывная составляющая определяется коэффициентом передачи меньшего уровня. Такое разложение позволяет рассматривать многие особенности релейно-имнульеных ЭР на основе анализа только импульсных составляющих, которые выражаются через коммутационные функции. Комбинированное (релейно-импульсное) управление применяется для достижения каких-либо частных технических целей. Так, совмещением операций квантования выходного напряжения по уровню и по времени можно повысить точность регулирования: грубое регулирование осуществляется релейным, а точное — импульсным управлением.
В системах управления электротермоустановками с нагревом сопротивлением применяются сочетания различных способов управления, например, с одновременным изменением выходного параметра (мощности в нагревателях) в пределах каждого полупериода напряжения, подключаемого к нагрузке, и числа этих полупериодов за интервал повторения. Такое управление необходимо, например, при разогреве мощных установок, нагреватели которых в холодном состоянии имеют сопротивление, в несколько раз меньшее, чем в нагретом, и при этом может произойти перегрузка сети в первые моменты времени после включения установок. Возможны и иные сочетания способов управления;
2.2. Основные требования и классификация дискретных способов регулирования переменного напряжения.
В большинстве случаев стационарная аппаратура получает энергию от силовой сети переменного тока промышленной частоты, качество электроэнергии которой, определяемое ГОСТ 13109-67, не всегда удовлетворительно. Для получения повышенного качества (с заданной точностью, уровнем пульсации, гармоническим составом, и т. п.) применяют регуляторы и стабилизаторы напряжения, относящиеся к источникам вторичного электропитания, которые включаются между сетью и потребителями.
Стабилизаторы напряжения призваны уменьшить нестабильность напряжения сети. Наряду с обеспечением высоких энергетических, надежностных и удельных по массе и объему показателей стабилизаторы должны как можно меньше искажать форму напряжения сети. Кроме того, стабилизаторы должны обеспечивать для проведения профилактического режима работы РЭА под регулировку стабилизированного напряжения в диапазоне ±10%.
Качество электрической энергии на входе регулятора или стабилизатора, переменного напряжения оценивается коэффициентами, которые характеризуют форму кривой напряжения:
Коэффициентом искажения Kни=U1/U,
где U - действующее значение напряжения;
U1- действующее значение напряжения основной гармоники;
Коэффициентом нелинейных искажений, оценивающим гармонический состав напряжения,

где Uk - действующее значение напряжения k-ой гармоники. Коэффициентом формы kф = U/Uср

В большинстве случаев стабилизаторы должны обеспечивать гальваническую развязку между сетью и нагрузкой.
Точностные, энергетические, надёжностные, а так же удельные по массе и объему показатели регуляторов определяются в основном способом регулирования напряжения и его схемной реализацией.
2.3. Исполнительный дискретный орган стабилизаторов переменного напряжения.
Простейшим устройством, обеспечивающим дискретное широкодиапазонное регулирование напряжения, является трансформатор с секционированной первичной или вторичной обмотками или только одной из них. Энергетические показатели широкодиапазонных регуляторов получаются выше при секционировании вторичной обмотки трансформатора.
На рис. 2.9, а представлена схема ключа, где последовательно с каждым отводом обмотки трансформатора включен реверсивный ключ SAi. Напряжение Ui, снимаемое с обмотки wi младшей секции, имеющей минимальное число витков, при замыкании ключа SA1 в момент прохождения тока через нуль, является минимальным значением дискретного изменения напряжения на нагрузке при условии, что числа витков обмоток секций (от младшей к старшей) составляют арифметическую прогрессию.
Общее число секций n, состоящих из обмотки wi, и реверсивного ключа SAi, определяется диапазоном регулирования напряжения
n = (Uн.max-Uн.min)/Ui,:
где n округлено до большого ближайшего целого числа; Uн.max и uн.min -максимальное минимальное значения напряжения на нагрузке. Такая схема проста, но характеризуется большим числом обмоток, выводов и ключей.
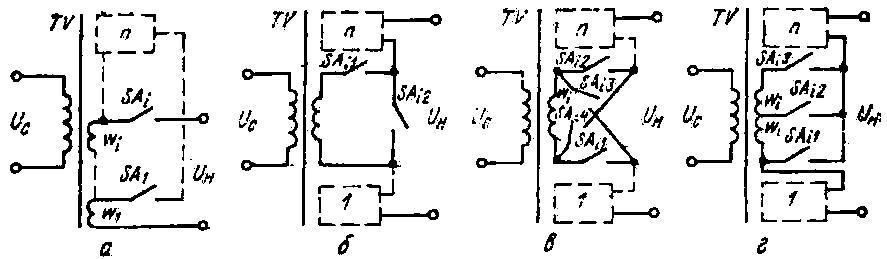
Значительное сокращение числа коммутируемых секций при выполнении условия широкодиапазонного регулирование напряжения достигается исполнением секций таким образом, что числа их витков образуют геометрическую прогрессию со знаменателем 2, т. е. исполнением их по двоичной системе счисления. Для этого каждая секция должна иметь возможность с помощью коммутируемых ключей как включаться последовательно с другими секциями, так и исключаться из набора секций (шунтироваться).
На рис. 2.9, б показана схема силовой части регулятора для широко-диапазонного регулирования напряжения с возможностью согласованного включения переключаемых секций (ПС) между собой (ключи SAi1 включены а ключи SAi2 выключены) или исключения i-й секции из набора путем включения ее шунтирующего ключа SAi1, и выключения ее последовательного ключа SAi2. Общее число переключающихся секций ПС, обеспечивающих изменение напряжения на нагрузке от uh min до uh max (uh min является напряжением младшей секции), определяется формулой

где n округлено до большего ближайшего числа.
При дискретности изменения выходного напряжения 1...2 В выигрыш на две секции по сравнению со схемой, изображенной на рис. 2.9, б, получается при использовании секций с числами витков, соотносящимися
между собой как числа 3° : З1 : З2 : З3 : З4 = 1 : 3 : 9 : 27 : 81 и т. д., т. е. составляющими геометрическую профессию со знаменателем 3 (рис. 2.9, в). Причем каждая из обмоток секций может быть включена согласно с остальными обмотками секций (ключи Sai1 и SAi2 включены, а ключи SAi3 и SAi4 выключены) или исключена из набора секций (ключи SAi3 и SAi4 включены, а ключи SAi1 и SAi2 выключены). Однако наряду с указанным уменьшением» количества секций трансформатора одновременно увеличивается в 1,5 раза, число ключей и усложняется алгоритм управления ими. В схеме на рис. 2.9, г по сравнению со схемой на рис. 2.9, в число секций уменьшается на одну, а число ключей - в два раза. Это достигается. выполнением секционированных обмоток со средними точками при сохранении соотношения витков обмоток секций, определяемого геометрической прогрессией с основанием 3, и при соединении секций, как показано на рис. 2.9, г, причем в каждой секции может быть включен только один ключ. Для получения напряжения Uнmin, которое определяет дискретность изменения напряжения uн, должен быть включен средний ключ SAi2 младшей секции и первые ключи (SA12, SA31, ..., SAn1) остальных секций. Напряжение Unmax получается при включении третьих ключей SA13, SА23, .... SАn3 каждой секции, оно равно:
Uнmax = Uнmin*(3n - 1)
Достоинство регуляторов этого типа — амплитудное регулирование напряжения, при котором искажения сетевого напряжения минимальны, что в сочетании с ключевым режимом работы ИО обеспечивает высокий к. п. д. схемы, а также возможность цифрового управления без промежуточных преобразований цифровой величины управляющих сигналов в аналоговую форму. Недостатками являются наличие трансформатора достаточно сложной конструкции и большое числа ключей, зависящее от дискретности управления.
В мощных регуляторах и стабилизаторах, питаемых от трехфазной сети переменного напряжения, применение чисто релейного режима нецелесообразно, поскольку усложняется конструкция трансформатора и значительно увеличивается число ключей. В таких схемах используют релейно-импульсные ИО на трехфазных трансформаторах с переключением отпаек. Грубое регулирование в таких регуляторах осуществляется релейно с помощью переключения отпаек (или секций) трансформатора, а точное — импульсными методами за: счет временной модуляции включенного состояния ключей.
В таких ИО еще в большей степени, чем в ИО импульсных регуляторов, проявляется взаимное влияние различных фаз. В трех стержневом трансформаторе в любой момент времени должен выполняться баланс мгновенных значений магнитных потоков стержней или, если использовать связь производных потоков, напряжений и числа витков обмотки w? баланс мгновенных значений напряжений на один виток
![]() (2.3.)
(2.3.)
При нарушении соотношения (2.3) появляется поток рассеяния, замыкающийся по воздуху, что приводит к появлению значительных уравнительных токов.
Исходя из требований предъявляемых к дискретным СПН и рекомендаций, а так же проанализировав различные виды ДИО была выбрана схема силовой части СПН, рис. 2.10.

Рис. 2.10.
Так как пределы стабилизации сравнительно невелики ± 20% эта схем, ДИО является оптимальной по простоте изготовления, минимума регулирующих секций, ключей и алгоритму управления ими. Точность стабилизации обусловлена числом витков младшей секции 1 и должна удовлетворять ГОСТ 13109-67 (±5%).
Принципиальная схема комбинированного стабилизатора переменного напряжения с регулирующими элементами по первичной обмотке приведена на рис. 2.11, по вторичной обмотке на рис. 2.12.
Минимизация уровня искажения формы кривой напряжения и уровня помех обусловлена применением датчиков нуля тока и напряжения, разрешающих коммутацию тиристоров в моменты, когда мгновенное значение напряжения равно 1 (на самом деле 10В, что эквивалентно 2 электрическим градусам — минимальный угол коммутации тиристоров). Дополнительная помехозащита осуществлена гальванической развязкой входа и выхода СПН, трансформатором с электростатическим заземленные экраном между первичной и вторичной обмотками и использование на выходе СПН помехоподавляющего фильтра с режекторным дросселем.

Рис. 2.11.

Рис 2.12