

ФСС 3, 4
(Конспект)
©В.Е.Рок 2011
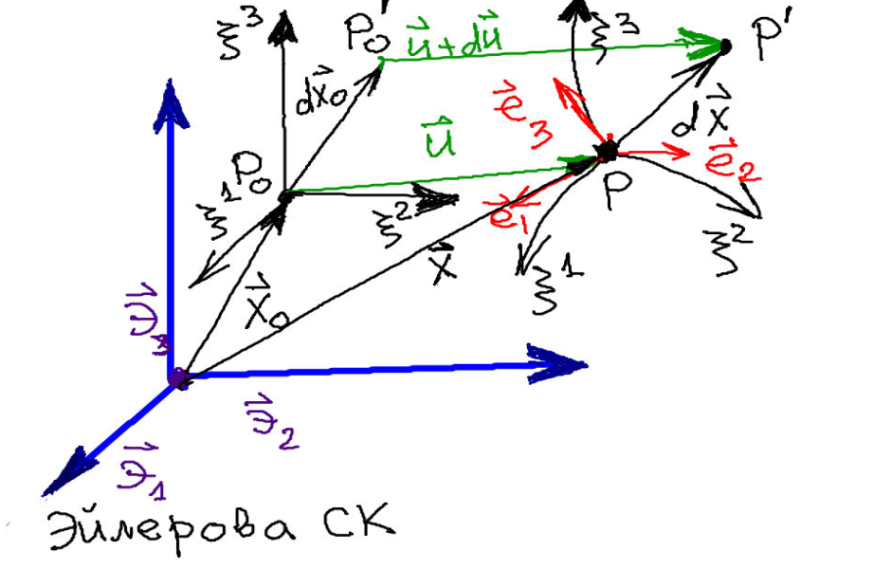
Деформации сплошной среды
При
деформации сплошной среды в окрестностях
некоторой точки P0
(при t=0) эта
точка в эйлеровой СК переместится к
моменту t>0 в
положение P, а соседняя с
P0 точка P’0
- в P’. Зная векторное
поле смещений
 в
лагранжевой СК для эйлеровых координат
точки P справедливо:
в
лагранжевой СК для эйлеровых координат
точки P справедливо:
 а смещение из т. P в т. P’,
учитывая их исходную близость в
лагранжевой СК :
а смещение из т. P в т. P’,
учитывая их исходную близость в
лагранжевой СК :

(градиент вектора смещения вычисляется в лагранжевых координатах, сопутствующих частицам сплошной среды).


С
помощью оператора Гамильтона «набла»
можно записать


с другой стороны в начальном положении

где
градиент
 вычисляется
по координатам в момент t=0,
совпадающим с эйлеровыми!
вычисляется
по координатам в момент t=0,
совпадающим с эйлеровыми!
Квадрат расстояния между точками P’ и P в момент t:


Его изменение к моменту t от момента t=0:

Где

- тензор деформации Грина
Аналогично можно получить в переменных Эйлера:

- тензор деформации Альманса.
Если тензоры деформации равны нулю, то расстояния между близкими точками тела не меняются, то есть тело движется как абсолютно твёрдое.
В компонентах разложения по соответствующим базисам приведённые выше формулы имеют вид:

Символ
«,i» означает, как
обычно, ковариантное дифференцирование
по

Поскольку
при t=0
 то
«0,i» соответствует
дифференцированию по эйлеровой
переменной
то
«0,i» соответствует
дифференцированию по эйлеровой
переменной
 .
.
Для твёрдых (упругих, пластических и т.п. – то есть таких, частицы которых не могут свободно перемещаться по внутреннему объёму тела) тел удобнее пользоваться лагранжевыми переменными, в которых естественно задавать граничные условия на их собственных границах этих тел, поскольку образующие их частицы тела при любых непрерывных деформациях остаются всегда на его границах.
Для
точки P’0
с радиус-вектором
 перемещение
можно записать в виде
перемещение
можно записать в виде

Введём
симметричную и
антисимметричную
и
антисимметричную части тензора
части тензора
Тогда

Антисимметричный
тензор
второго ранга в трехмерном пространстве
можно заменить аксиальным вектором

То
есть смещение окрестности точки P0
представляет собой перенос вместе
с этой точкой на вектор
 поворот вокруг неё как твёрдого
целого, определяемый вектором
(то есть антисимметричной частью
тензора градиента векторного поля
деформаций) и объемную деформацию,
меняющую расстояния между точками этой
окрестности, определяемую тензором
поворот вокруг неё как твёрдого
целого, определяемый вектором
(то есть антисимметричной частью
тензора градиента векторного поля
деформаций) и объемную деформацию,
меняющую расстояния между точками этой
окрестности, определяемую тензором
 Этот вывод называется теорема
Коши-Гельмгольца.
Этот вывод называется теорема
Коши-Гельмгольца.
Малые деформации
Если деформации малы и все компоненты градиента вектора смещений являются малыми величинами, то выражения для вычисления его симметричной и антисимметричной частей можно упростить, отбросив слагаемые более высокого порядка малости, тогда:

В
этом случае и
 ,
то есть дифференцирование по
,
то есть дифференцирование по
 совпадает
с дифференцированием по
совпадает
с дифференцированием по
 поскольку
поскольку

ЗАМЕЧАНИЕ. Точное выражение для тензора деформации можно представить в виде

Если
растяжения и сдвиги имеют второй
порядок малости по отношению к поворотам
и смещениям (так деформируются стержни,
пластинки и оболочки), то следует
считать
 (оба слагаемых одного порядка величины).
(оба слагаемых одного порядка величины).
Тензор деформации симметричен, поэтому его можно привести к главным осям (своим в каждой точке сплошной среды), которые могут быть выбраны взаимноортогональными. В этом собственном ортогональном базисе компоненты тензора деформации образуют диагональную матрицу


Для
обозначения компонентов тензора
деформации в произвольной системе
координат Теодором фон Карманом были
введены названия деформации для
диагональных компонентов и сдвиги
для половин внедиагональных. В декартовых
СК компоненты деформации индексируются
одним индексом, соответствующим положению
элемента на главной диагонали матрицы
 (нет суммирования по k!),
компоненты сдвигов
(нет суммирования по k!),
компоненты сдвигов
 .
Эти термины используются в литературе
по механике сплошных сред. Не следует
путать полный тензор деформации, с
деформациями по осям координат в смысле
Т. Кармана и сдвиги в смысле Т. Кармана
с деформацией сдвига (сдвиговой
деформацией), которая представляет
собой результат равномерного «послойного»
смещения слоев сплошной среды!
.
Эти термины используются в литературе
по механике сплошных сред. Не следует
путать полный тензор деформации, с
деформациями по осям координат в смысле
Т. Кармана и сдвиги в смысле Т. Кармана
с деформацией сдвига (сдвиговой
деформацией), которая представляет
собой результат равномерного «послойного»
смещения слоев сплошной среды!
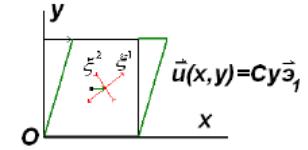
То
есть в декартовой системе координат с
началом в левом нижнем углу деформируемого
квадратного сечения и осями, направленными
вдоль его рёбер, смещения вдоль оси OX
линейно зависят от ординаты точек среды
ux=Cy,
а uy=0.
Компоненты тензора деформаций в этом
базисе:
 .
Этому тензору соответствуют собственные
векторы
.
Этому тензору соответствуют собственные
векторы

 .
В базисе
.
В базисе
 матрица компонентов тензора деформаций
приобретает диагональный вид,
соответствующий растяжению по оси
матрица компонентов тензора деформаций
приобретает диагональный вид,
соответствующий растяжению по оси
 и сжатию по оси
и сжатию по оси
 :
:
 .
Псевдовектор поворота при этом движении
.
Псевдовектор поворота при этом движении
 :
:
Как любой тензор второго ранга, тензор деформации может быть единственным образом представлен в виде суммы шаровой и девиаторной частей:
 , где
, где

В собственном базисе относительное изменение расстояния между близкими точками вдоль каждой оси координат:
Элемент
объёма
 после деформации занимает объём
после деформации занимает объём

Относительное (по отношению к первоначальному объёму) изменение объёма элемента сплошной среды составит
