

3.1.3 Винтовая интерполяция: g2/g3, turn
Функциональность
При винтовой интерполяции накладывается два движения:
− круговое движение в плоскости G17 или G18 или G19
− линейное движение расположенной вертикально на этой плоскости оси.
С помощью TURN= программируется кол-во дополнительных проходов полного круга.
Они добавляются к программированию окружности.
Винтовая интерполяция может использоваться преимущественно для фрезерования резьб или смазочных канавок на цилиндрах.
Программирование:
G2/G3 X... Y... I... J... TURN=... ; центр и конечная точка
G2/G3 CR=... X... Y... TURN=... ; радиус окружности и конечная
точка
G2/G3 AR=... I... J... TURN=... ; аппертурный угол и центр
G2/G3 AR=... X... Y... TURN=... ; аппертурный угол и конечная
точка
G2/G3 AP=... RP=... TURN=... ; полярные координаты, окруж-
ности вокруг полюса
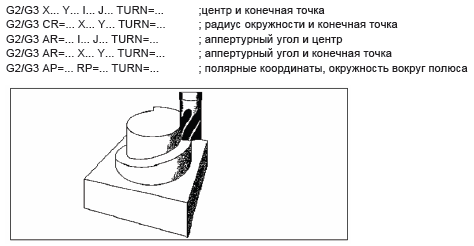
Рисунок 16 - 3 Винтовая интерполяция: G2/G3, TURN.
Пример программирования:
N10 G17 ; плоскость X/Y, Z вертикально
к ней
N20 ... Z...
N30 G1 X0 Y50 F300 ;подвод к начальной точке
N40 G3 X0 Y0 Z33 I0 J−25 TURN= 3 ;винтовая линия
4 Cad/cam система Гемма 3d v9.5
Система геометрического моделирования и программирования обработки для станков с ЧПУ ГеММа-3D. Центральной задачей, на решение которой ориентирована система, является получение эффективных программ обработки наиболее сложных деталей на станках с ЧПУ, изготавливаемых с помощью фрезерования, сверления, электроэрозионной резки, вырубки, токарной обработки, гравировки.
4.1 Назначение системы
Построение математических моделей деталей и агрегатов любой степени сложности.
Доработка математических моделей в соответствии с требованиями технологического процесса обработки конкретным инструментом на определенном оборудовании с ЧПУ.
Подготовка управляющих программ для станков с ЧПУ: фрезерных (2-х, 3-х, 4-х, 5-и координатных), электроэрозионных (2-х, 3-х, 4-х координатных), сверлильных, токарных, гравировальных.
Подготовка технологических эскизов и технологических карт.
Обработка результатов измерений изделий для оценки точности изготовления.