

Регулирование скорости вращения и реверсирование асинхронных электродвигателей.
Регулирование скорости вращения асинхронных двигателей производят несколькими способами.
Скорость вращения асинхронного двигателя расчитывается по формуле:
n = 60f(1 - s)/p (об/мин)
s - скольжение в долях единицы.
Из этой формулы видно, что скорость можно регулировать изменением:
- частоты переменного тока;
- числа пар полюсов;
- скольжения.
Регулирование скорости изменением величины скольжения асинхронного электродвигателя ввозможно двумя способами:
1). введением в цепь ротора дополнительного сопротивления, что возможно для двигателя с фазным ротором.
2). изменением реактивных сопротивлений, включаемых в обмотку статора.
Регулирование скорости вращения двигателя с фазным ротором введением в его цепь дополнительного сопротивления позволяет уменьшить его скорость не более, чем на 40 - 50% номинальной скорости.
При таком регулировании с увеличением сопротивления реостата увеличивается величина скольжения, то есть уменьшается скорость вращения двигателя.
В этом случае схема регулирования сходна со схемой пуска асинхронного двигателя с фазным ротором с той разницей, что регулировочный реостат должен быть расчитан на длительную нагрузку током.
Регулирование скорости вращения с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки.
Этот способ неэкономичен, так как увеличивает потери в роторной цепи.
Такой способ регулирования скорости вращения асинхронных электродвигателей применяют в тех случаях, когда работа двигателя с пониженной скоростью непродолжительна и когда не требуется большой точности регулировки (например подьемно-транспротные механизмы).
Регулирование скорости двигателе при помощи дросселей состоит в том, что в цепь статора электродвигателя включают реактивные сопротивления с переменной индуктивностью.
Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями.
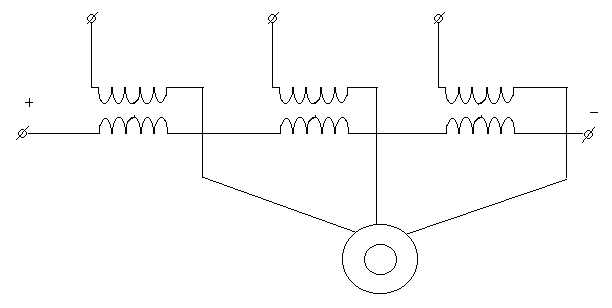
Изменяемое индуктивное сопротивление в цепи статора позволяет получить на зажимах электродвигателя различное напряжение, чем достигается изменение скольжения, то есть скорости вращения ротора.
Достоинством этого способа является плавное регулирования скорости вращения электродвигателя.
К недостаткам относится следующее: значительное уменьшение максимального вращающего момента, а так же уменьшение коэффициента мощности.
Регулирование скорости вращения за счет изменения числа пар полюсов осуществляется переключением обмоток статора и является ступенчатым.
Для этих целей применяют специально выпускаемые многоскоростные двигатели ( на 2, 3 и 4 скорости).
Двухскоростные двигатели имеют 6, трехскоростные - 9 и четырехскоростные - 12 выводов к переключателю полюсов.
Регулирование скорости вращения двигателей изменением частоты тока требует применения специального источника переменного тока с изменяемой частотой.
Изменение направления вращения двигателя называется реверсированием.
Реверсирование достигается изменением направления вращения магнитного поля. Для этого достаточно переключить любые два провода трехфазной системы подводящей ток к статору электродвигателя.