

Механіка.
Механіка – це розділ фізики, який вивчає різні види механічного руху тіл.
Взагалі, у фізиці існує декілька механік.
Механіка класична – основана на законах Ньютона і справедлива для макроскопічних тіл, швидкість руху яких значно менша швидкості світла у вакуумі;
Механіка релятивістська – для тіл, швидкість руху яких досить велика у порівнянні з швидкістю світла;
Механіка квантова – описує рух мікрочастинок за допомогою хвильових рівнянь Шредінгера і Дірака.
В граничних випадках релятивістська та квантова механіки переходять у класичну механіку. Тому між ними немає ніяких протиріч. Нижче спочатку розглянемо основи механіки класичної, яка складається з трьох основних розділів: кінематики, динаміки і статики та важливого додатку до них у вигляді законів збереження.
Л- 01.
1 Кінематика
1.1 Основні поняття кінематики
Кінематика – це розділ механіки, який вивчає рух тіл, не виясняючи його причин.
Механічний рух – переміщення тіла у просторі й часі відносно інших тіл, які вважаються нерухомими.
Система відліку – це тіло відліку, зв’язана з ним система координат і годинник.
Початок відліку – момент часу, з якого вивчається рух тіл.
Матеріальна точка – це фізична модель, яку використовують замість тіла, розмірами якого в умовах даної задачі можна знехтувати.
Траєкторія
– сукупність точок простору, які
послідовно проходить тіло при своєму
русі (простіше, це слід тіла у просторі).
![]()
Шлях (S) – відстань між початковим і кінцевим положенням тіла, виміряна по траєкторії, тобто це довжина траєкторії. Шлях – величина скалярна.
Переміщення
( )
– відрізок прямої, який з’єднує початкове
і кінцеве положення тіла. Це векторна
величина, яка вказує напрямок руху тіла
і співпадає із шляхом тільки у випадку
прямолінійної траєкторії.
)
– відрізок прямої, який з’єднує початкове
і кінцеве положення тіла. Це векторна
величина, яка вказує напрямок руху тіла
і співпадає із шляхом тільки у випадку
прямолінійної траєкторії.
Задача кінематики – визначити положення тіла (його координати) і швидкість руху в будь-який момент часу.
1.2 Поступальний і обертальний механічний рух
По формі траєкторії механічний рух буває прямолінійний і криволінійний, по швидкості – рівномірний і нерівномірний.
Для тіл, які не можна вважати матеріальними точками, рух буває поступальний і обертальний. При поступальному русі будь-яка пряма, проведена через дві точки тіла, залишається паралельною сама собі. При обертальному русі всі точки тіла описують концентричні кола, центри яких лежать на одній прямій, яка називається віссю обертання.
1.3 Способи описування руху точки у просторі
Є три способи фіксації положення і руху точки у просторі: звичайний, векторний і координатний.
1.При звичайному
(траєкторному)
способі повинна бути відома функція S
= S(t)
вдовж вказаної траєкторії. ![]()
Наприклад, S(t) = 10 + 2t -3t2 + 5t3 (м).
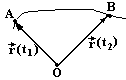
2.При векторному
способі положення точки задається
кінцем радіус-вектора
 ,
проведеним із деякого центра О. Векторна
функція часу
,
проведеним із деякого центра О. Векторна
функція часу
 ,
яка називається векторним законом руху
тіла.
,
яка називається векторним законом руху
тіла.
Наприклад,
 ,
,
де
 - одиничні вектори (орти) вздовж
координатних осей X,
Y,
Z
відповідно.
- одиничні вектори (орти) вздовж
координатних осей X,
Y,
Z
відповідно.
3.При координатному
способі повинні бути заданими: 
1) система координат X, Y, Z; 2) функції часу: x(t), y(t), z(t). Наприклад,
x(t) = 4t (м); y(t) = -7t2 (м); z(t) = 2t3 (м).
Всі способи взаємозв’язані.
Найпростішим є зв’язок двох останніх.
Якщо помножити координатні функції на
відповідні орти і додати, одержимо
векторну функцію
 .
.