Вимірювання індукції
Вимірювання
індукції постійного чи змінного
магнітного поля з допомогою вимірювальних
котушок
полягає у визначенні потокозчеплення
ВК з досліджуваним полем. При цьому,
вимірявши, наприклад, за допомогою
балістичного гальванометра повний
потік, що зчеплюється з витками ВК, і
знаючи число w
витків та поперечний переріз S
котушки, визначають індукцію як:
 . (5.23)
. (5.23)
При вимірювані
індукції ВК розміщують у полі так, щоб
вектор індукції був перпендикулярним
до площини котушки.
В
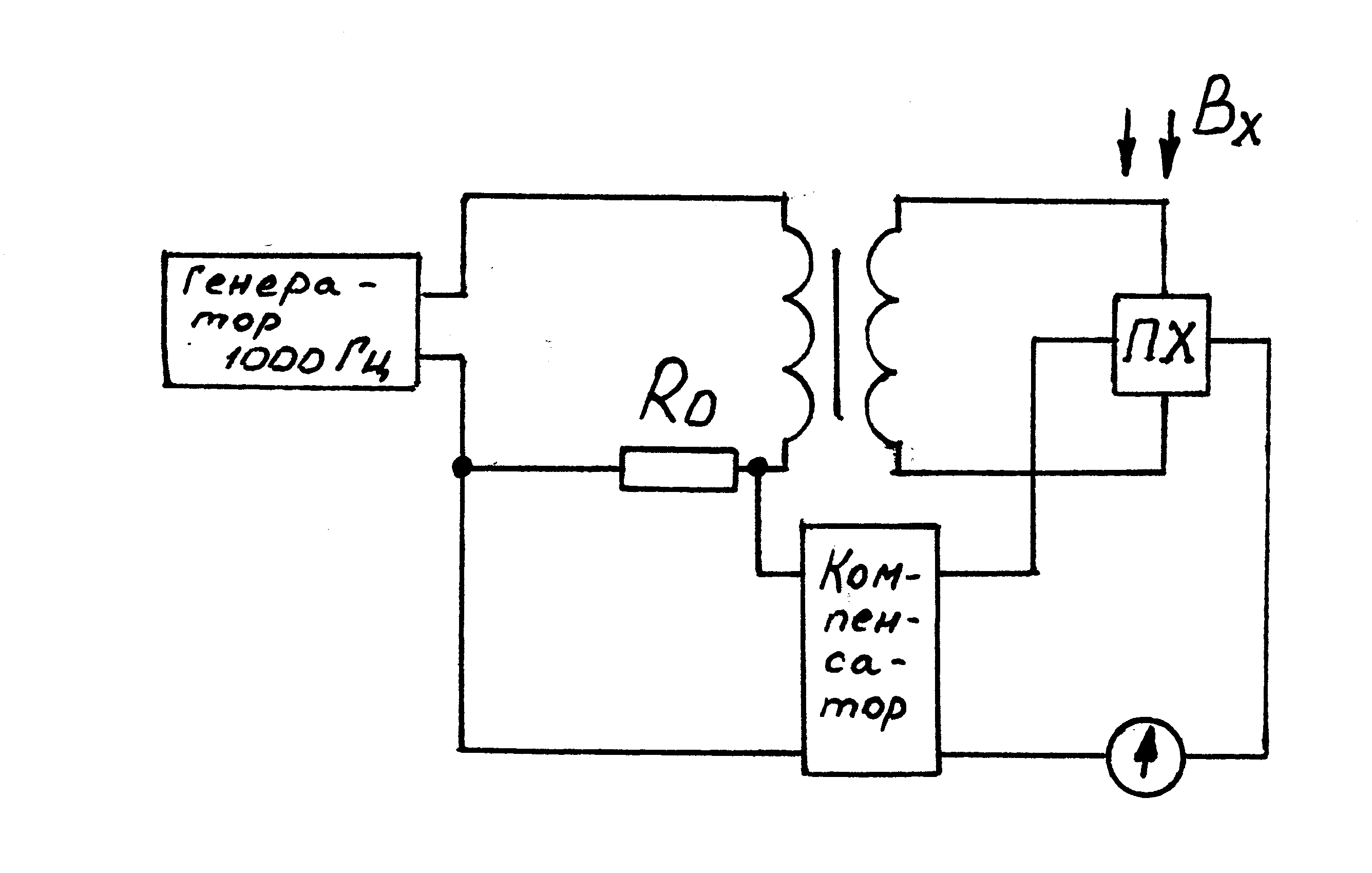
Рисунок 5.13 -
Принципіальна схема приладу для
вимірювання індукції постійних магнітних
полів на базі перетворювача Холла.
имірювання індукції приладами з
фероіндукційними ВП
проводиться приладами, принципіальна
схема яких подібна до показаної на рис.
5.13.
Це прилад для вимірювання індукції
постійних магнітних полів. Перетворювачем
магнітної індукції є перетворювач
Холла, що живиться від RC-генератора
змінним струмом з частотою 1000 Гц. ЕРС
Холла вимірюється з допомогою тридекадного
компенсатора змінного струму. Живлення
компенсатора здійснюється через резистор
R0
від того самого джерела, що й живлення
перетворювача Холла. Основна похибка
такого приладу при вимірюванні індукції
в межах 0,01…1,5 Тл становить 1,5…2%.
В
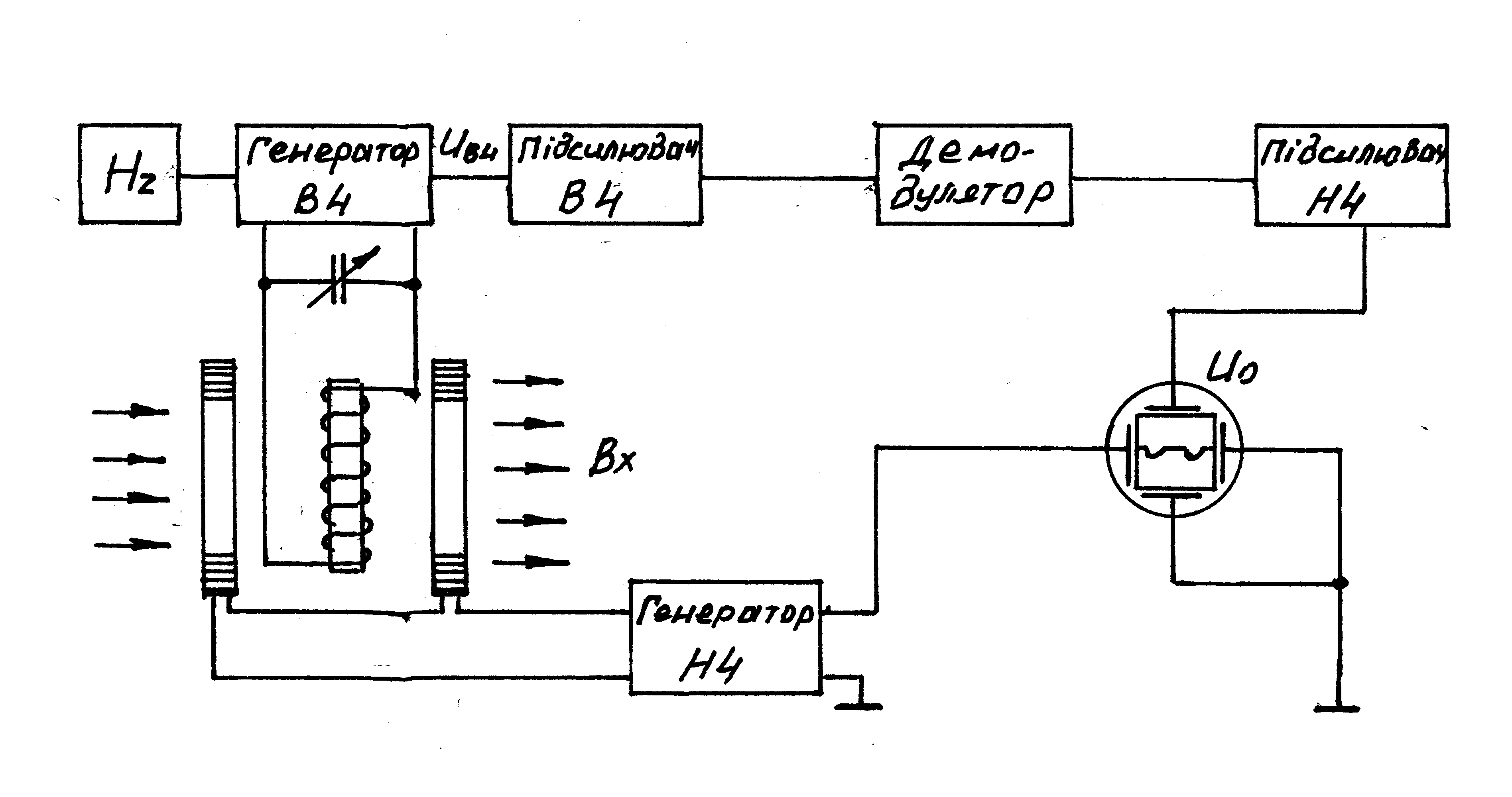
Рисунок 5.14 -
Структурна схема тесламетра з
перетворювачем ЯРМ.
имірювання індукції за
допомогою квантових ВП
є найточнішими і проводяться, наприклад,
за допомогою тесламетрів з перетворювачами
ЯМР. Робота такого вимірювача грунтується
на на методі резонансного
поглинання, його схема
наведена на рис. 5.14.
Вимірювальний перетворювач (зонд) такого
приладу являє собою ампулу, наповнену
водою, водним розчином хлористого літію
або ж важкою водою (залежно від бажаної
межі вимірювання). На ампулу намотано
котушку індуктивності, яка входить в
контур високочастотного генератора,
частоту якого можна регулювати. При
вимірюванні досліджуваної індукції Bx
регулюванням частоти генератора ВЧ
можна досягти резонансу (зрівняння
частоти прецесії ядер робочої речовини
і частоти ВЧ-поля). При цьому матиме
місце поглинання енергії та збільшення
амплітуди генерованих коливань.
Метод резонансного
поглинання застосовують для вимірювання
індукції від 0,005 Тл і вище. Нижня межа
вимірювань визначається значенням
амплітуди резонансного сигналу. Основними
складовими похибки вимірюванння за
метдом ЯМР є похибки визначення
гіромагнітного відношення і вимірювання
частоти, а також похибка фіксації
резонансу. Названі складові незначні,
що дає на практиці змогу побудувати
тесламетри з перетворювачем ЯМР для
вимірювань індукції в діапазоні від
0,05 до 2,5 Тл з похибкою 0,003…0,01%.
В
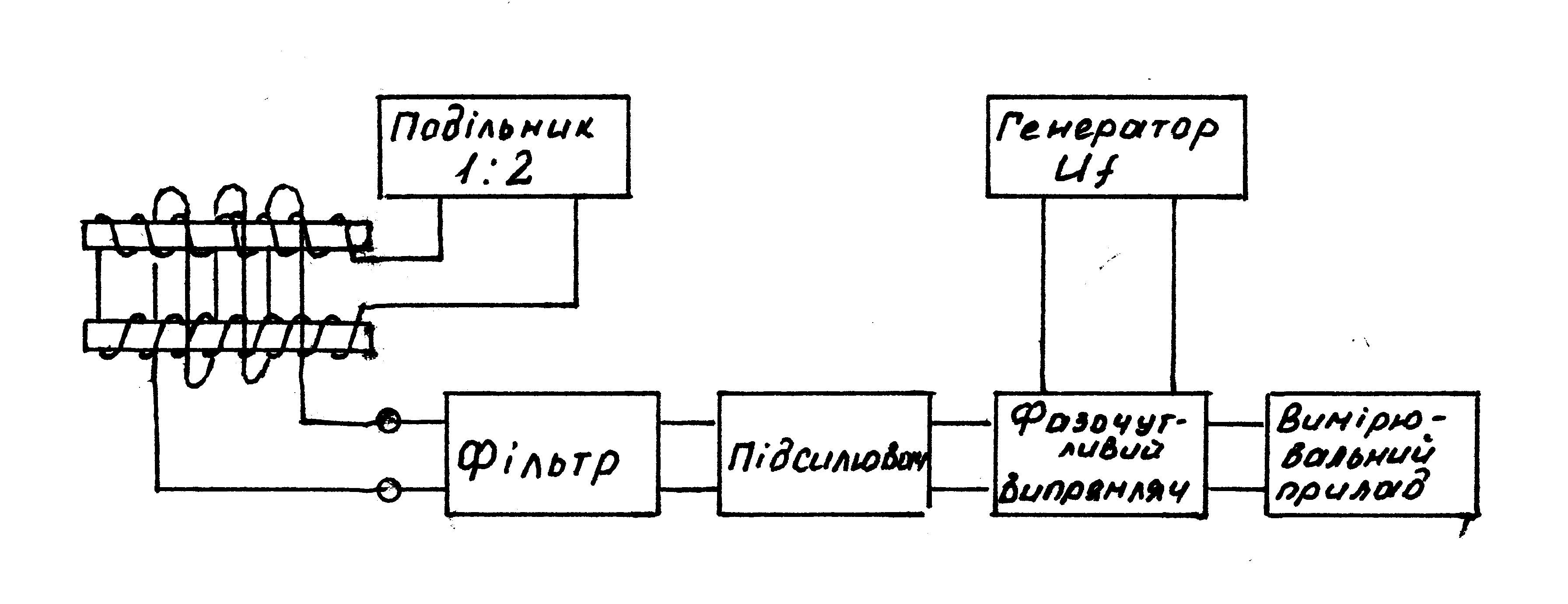
Рисунок
5.15 - Структурна схема ферозондового
вимірювача магнітної індукції.
имірювання індукції за
допомогою ферозонда можна
здійснювати, наприклад, за схемою,
зображеною на рис. 5.15.
Обмотка збудження зонда такого приладу
живиться від генератора звукової частоти
через подільник частоти (1:2). ЕРС другої
гармоніки, значення якої пропорційне
вимірюванй індукції, відфільтровують
фільтром, підсилюють, випрямляють і
вимірюють вихідним приладом.
Ферозондовим
вимірювачем можна вимірювати індукцію
в діапазоні від 0,01 до 1,6 Тл з похибкою,
не більшою за 2%.

