Шпоры по микро-процессорным устройствам / Шпоры МП 34-37
.doc|
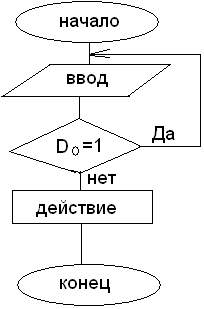
34. Программная реализация функций управления 1) Опрос двоичного датчика. Д Проверка датчика. При замкнутом ключе должен быть ноль.
2) Ожидание события –изменение среды управления. Изменение фиксируется при помощи датчиков. Пока нет событие, программа его ждет (зацикливание программы).
3) Формирование управляющих сигналов. Используется порт вывода. Формирование сигнала включения (выключения).
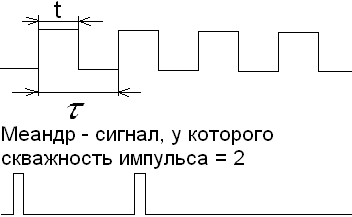
MVI A, 01h - включение OUT PORT XRA A - выключение OUT PORT 4) Формирование меандра (некоторого прямоугольного напряжения).
Скважность программируют с помощью программной задержки.
LOOP: MVI A, 01h OUT PORT CALL delay_п XRA A OUT PORT CALL delay_0 JMP LOOP 5 DELAY: MVI B, N LOOP: DCR B JNZ LOOP RET
6) Стандартная задержка. DELAY: LXI B, N 0,7 секунды NOP LOOP: DCX B MOV A, C ORA B JNZ LOOP RET |
35. Моделирование аппаратных средств МП система включает в себя множество компонентов, часть из которых являются постоянными: процессорный модуль, постоянная память, и ряд временных компонентов: средства ввода-вывода, компоненты преобразования сигналов из одной формы в другую, формирователи временных стробов, импульсных сигналов и т.д. 2 фактора реализации функций: 1) Отсутствие жёстких требований к быстродействию. 2) Програм. модель должна отображать функции аппаратных средств, а именно: восприятие, хранение, преобразование и выдача цифровой информации. Программная модель должна включать в себя, программу работы моделируемого программного средства и входные переменные, которые программа преобразует в выходные переменные. Прогр. моделирование возможно с использованием 2-х методов:
1) Компиляционный метод – прогр. модель реализуется для каждого аппаратного устройства отдельно и представляет собой программную реализацию алгоритма работы моделируемого устройства. 2 Компиляционный метод выполняется быстрее, чем интерпретирующий. Интерпретирующий метод требует больше объёма памяти, чем компиляционный. Пример: логическое устройство 155ЛР1
|
36. Методика проектирования МПС Процесс проектирования МПУ содержит ряд специфических этапов, обусловленных наличием как аппаратных средств (АС), так и программных средств (ПС). Этот процесс отличается от проектирования традиционных электронных устройств. Особенность проектирования заключается в оптимальном интегрировании АС и ПС в единую систему для выполнения общей задачи. Сам процесс носит циклический характер.
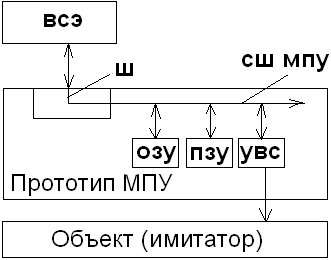
1) Формируются конкретные технические требования к МПУ со стороны заказчика, а именно: быстродействие, габаритные размеры, энергетические характеристики, технологические, стоимостные. 2) Идёт работа со стороны разработчика. Определяются требования к МПУ, как к электронному устройству (выбор питания, технологической базы, определение статических и динамических характеристик), так и как к программируемому устройству (выбор разрядности МП, выбор микропроцессорного комплекта, быстродействие, необходимый объём памяти, средства взаимодействия с окружающей средой). 3) Разработка общей структуры МПУ, алгоритмы функционирования, выделяется аппаратно-реализуемая функция 4) Разработка АС включает в себя разработку МПУ как электронного устройства, после чего разрабатывается прототип – система в схеме приближения в виде принципиальной схемы, и проводится автономная отладка. 5) Комплексная отладка. Метод заключается в том, что для отладки МПУ создаётся единая отладочная система. ВСЭ (внутрисхемной эмуляции) – это отладочное средство, которое подключается к отлаживаемому МПУ через микропроцессорный разъём и обеспечивает управление МПУ путём эмуляции отдельных функциональных узлов прототипа МПУ.
Эмулятор – это законченная МПС (память, система синхронизации, система ввода-вывода, целевой МП). Идёт комплексная отладка с помощью ВСЭ: 1) Отладка аппаратных средств. Выполняется отладка и контроль узлов прототипа, включая устройства ввода-вывода, магистральная шина, память и т.д. Выходные сигналы контролируются эмулятором. 2) Отладка программных средств. Применяются 2 способа эмуляции: 1. Пошаговая эмуляция. После выполнения каждой команды программы , выполняется прерывание, и внутрисхемный эмулятор отображает состояние всех компонентов прототипа (содержание всех регистров, дампы памяти и т.д.). 2. Метод трассировки. Программа выполняется в автоматическом режиме без остановки, но при выполнении вся информация записывается, и затем , после окончания, выводится на экран. Часто используется комбинация этих двух методов (создаются контрольные точки). Эмулируется процессор, память и т.д., т.е. любой компонент. Здесь идёт выявление ошибок (если ошибка – возвращение назад). |
|
1) Интерпретирующий метод.
Программа должна найти в таблице входных переменных набор, и по нему определить выходную переменную. LXI H, TABL_bch - настраиваем базу на табл. LXI D, 0 - в D хранится имя таблицы MVI B, 0Fh - в B – общее кол-во эл-тов таблицы, чтобы обеспечить перебор переменных IN PORT - из вх. порта получаем набор вх. значений (засылаем в аккум.). LOOP: CMP M - сравниваем с первой строчкой JZ MET - выход на метку, по которой будем выполнять поиск JNX D - иначе во второй таблице (если элемент найден) INX H DCR B JNZ LOOP - переходим на Z MET: LXI H, TABL_BI - во второй таблице найти вых. набор DAD D MOV A,M - извлечь из таблицы OUT PORT - вывести в порт. 2) Компилирующий алгоритм. IN PORT - вводим значение порта в аккум. MOV E, A - пересылаем его в рег. Е.
RRC - сдвинуть на 1 разряд, чтобы потом провести операцию конъюнкции ANA E - операция конъюнкции MOV E, A - сохранение результата RRC - сдвигаем 2 раза вправо RRC (операция дизъюнкции) ORA E CMA OUT PORT - вводим значение в порт. Значение
получим в 4-ом и в 1-ом бите, в 1-ом -
|
||
|
37. Этапы проектирования МПС
Слово – все возможные изменения входных сигналов. 1.
Алфавит входных слов.
2.
Алфавит выходных слов.
3.
Алфавит состояния
4.
Начальное состояние автомата
5.
Функция переходов – зависимость
состояния автомата в определённые
моменты времени как функция состояния
автомата в предыдущий момент времени.
6. Функция выходов – выходные сигналы как функция состояния автомата в момент времени t
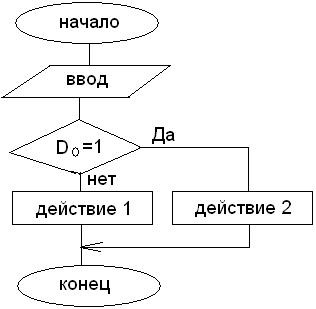
Этапы проектирования МПС: 1. Описание системы (Составляется входной алфавит, вых. алфавит, алфавит состояний), т.е. разработка алгоритма. 2. Составление графа автомата. 3. Составление таблицы переходов выходов.
4. Минимизация числа состояний. 5. Отображение графа автомата на блок-схему алгоритма. 6. Выбор системы команд для реализации блок-схемы. 7. Выбор микропроцессорного комплекта. 8. Выбор способов обмена с периферийными (внешними) устройствами. 9. Проектирование интерфейсов. (Разработка аппаратной поддержки, способов обмена). |
|
|
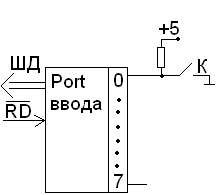 воичный
датчик – некоторое аппаратное
устройство, которое функционирует по
принципу «да – нет» (1 – 0)
воичный
датчик – некоторое аппаратное
устройство, которое функционирует по
принципу «да – нет» (1 – 0)