

Лабораторные работы / Основные понятия теории ошибок
.docОсновные понятия теории ошибок. Оценка точности наблюдений.
Для последующей ясности, в этой статье, под наблюдениями будем подразумевать совокупность одиночных измерений определенной величины: разница в блеске, показание шкалы микрометра и прочее. Это величина называется измеряемой или наблюдаемой. По особенности проведения, все наблюдения можно разделить на две группы: равноточные и неравноточные. К первой категории относятся такие наблюдения, которые были выполнены одним человеком, на одном приборе (инструменте) в сравнительно короткий промежуток времени (то есть одинаковое воздействие внешних факторов). Во вторую категорию, естественно, попадают те наблюдения, которые не соответствуют одному, нескольким или всем условиям принадлежности к равноточным наблюдениям. В этой статье не будут описаны точностные расчеты для наблюдений второй категории, они более сложны и громоздки, и применяются чаще в обработке геодезических измерений и при комплексных астронаблюдениях. Планируется подробно остановится на неравноточных измерениях в следующей статье из этого цикла, которая будет содержать основные принципы совместного уравнивания результатов наблюдений по способу наименьших квадратов.
Типы погрешностей наблюдений и особенности их учета
Любое измерение в реальных условиях производится с погрешностью, которую можно разделить на две составляющие - систематическую и случайную. Систематическая погрешность возникает в основном из-за ограниченной точности измерительных приборов, отчетных механизмов, а так же в связи с отсутствием учета второстепенных факторов, влияющих на измерения, или, если этот учет ведется не корректно. Систематические погрешности ведут к одностороннему искажению результатов наблюдений (постоянное завышение или занижение значения измеряемой величины). Их главная особенность - в ходе поверок инструментов и тестовых измерений вполне реально выявить такие погрешности (найти их численные значения и знаки), и тем самым свести их влияние на результаты наблюдений к минимуму. Случайные погрешности появляются из-за непредсказуемых, хаотичных причин, искажающих результаты наблюдений. Их особенность в том, что они приводят к получению разных значений измерений при их многократных повторах, проведенных в одинаковых условиях. Выявить случайные погрешности из отдельных замеров практически невозможно, но зато при достаточном количестве однородных измерений вполне реально "свести на нет" их совокупное влияние на результаты наблюдений. Такое минимизирование случайных искажений данных основано на ряде процедур, которые в свою очередь базируются на выводах и следствиях теории ошибок. Теория ошибок - математическая дисциплина, изучающая законы и особенности "поведения" погрешностей (ошибок) измерений. Например, нормальное распределение, эффект взаимной компенсации по знакам и так далее. Возникла эта дисциплина, как одно из многочисленных "ответвлений" от Теории Вероятностей. Математическая обработка различна для обоих видов погрешностей. Учет систематической составляющей есть процесс почти уникальный для каждого типа приборов и инструментов, для различных природных и прочих факторов, в том числе для каждого отдельного наблюдателя (так называемая личная ошибка, которую обычно классифицируют как подтип систематической составляющей). Случайные ошибки подчиняются универсальным законам, которые можно применять не только при наблюдениях разных объектов и измерениях разных величин, но и в разных науках - будь то астрономия, физика или геодезия. Основные принципы обработки везде одни и те же. Впрочем существует еще один класс погрешностей - грубая ошибка, или ложное измерение.
Точностной расчет для серии равноточных наблюдений
Рассмотрим алгоритм первичной обработки серии равноточных наблюдений. Пусть мы получили массив замеров измеряемой величины "Х", который имеет вид: X1, X2, ..., Xn, где n - количество замеров на сеансе.
-
Находим среднее арифметическое значение "Х" на сеансе:
Xs = ( X1 + X2 + ... + Xn ) / n
-
Рассчитываем отклонения среднего значения от измеренных:
d1 = X1 - Xs, d2 = X2 - Xs, ..., dn = Xn - Xs
-
Определяем среднюю квадратическую погрешность одного измерения, это параметр, который характеризует среднюю точность проведения одного замера:
MX = SQR ( ( d1 ^ 2 + d2 ^ 2 + ... + dn ^ 2 ) / ( n - 1 ) )
-
Находим среднюю квадратическую ошибку среднего арифметического, которая определяет надежность полученного результата:
MXs = MX / SQR ( n )
-
Рассчитываем относительную погрешность результата наблюдений:
U ( в процентах ) = ( MXs * 100% ) / Xs
-
Таким образом, получаем, что наиболее вероятное значение измеряемой величины на сеансе имеет значение:
Xsv = Xs + MXs
Особенности точностного расчета для прямых и косвенных измерений
По признаку анализирования получаемой при наблюдении информации, измерения делятся на прямые и косвенные. При прямых измерениях значение исследуемой величины измеряют непосредственно, например момент или промежуток времени. При косвенных измерениях, искомую величину рассчитывают по определенной формуле, в которую входят величины, измеряемые непосредственно, а так же заданные значения вспомогательных величин и констант, то есть можем записать: Y = F ( X1, X2, ..., Xn ), где Y - искомая величина, а X1, X2, ..., Xn - ее аргументы, измеряемые непосредственно. Пример косвенного измерения: исходя из снятых отчетов по окулярному микрометру, впоследствии переходим к координатам объекта. Важной задачей при обработке косвенных наблюдений является определение погрешности искомой величины по известным погрешностям величин ее составляющих. Формула, которая связывает эти параметры, имеет следующий вид:
MY = SQR ( ( ( dY / dX1 ) ^ 2 ) * MX1 ^ 2 + ( dY / dX2 ) ^ 2 ) * MX2 ^ 2 + ... ... + ( dY / dXn ) ^ 2 ) * MXn ^ 2 ),
где ( Di / dXi ) - частная производная функции Y = F ( X1, X2, ..., Xn ) по аргументу Xi, вычисленная в точке Xi.
Пример:
А теперь еще раз "пробежимся" по
описанной выше методики оценки точности
проведенных наблюдений, но уже на базе
конкретного случая. При наблюдениях
деталей на диске Юпитера, на протяжении
ночи были сделаны несколько
зарисовок/фотографий. 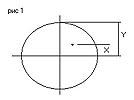 На
всех рисунках/фотографиях отмечено
точечное образование, находящееся в
южном полушарии и медленно передвигающееся
параллельно экватору за счет суточного
вращения планеты. Задача: определить
широту наблюдаемого образования - по
всей видимости ядра нового мощного
антициклона, на которые богата бурная
юпитерианская атмосфера. С изображения
Юпитера снимем два линейных значения:
расстояние от экватора (его легко
прочертить учитывая значительное сжатие
планеты) до полюса - Y и расстояние от
экватора до зафиксированного образования.
(см. рис 1). Так как масштаб зарисовок/фотографий
может быть разным, вычислим для всех
изображений относительные значения
величины Х ( Y приравняем к единице).
Далее приводится таблица с примером
вычисления средних квадратических
погрешностей одного наблюдения и всего
результата.
На
всех рисунках/фотографиях отмечено
точечное образование, находящееся в
южном полушарии и медленно передвигающееся
параллельно экватору за счет суточного
вращения планеты. Задача: определить
широту наблюдаемого образования - по
всей видимости ядра нового мощного
антициклона, на которые богата бурная
юпитерианская атмосфера. С изображения
Юпитера снимем два линейных значения:
расстояние от экватора (его легко
прочертить учитывая значительное сжатие
планеты) до полюса - Y и расстояние от
экватора до зафиксированного образования.
(см. рис 1). Так как масштаб зарисовок/фотографий
может быть разным, вычислим для всех
изображений относительные значения
величины Х ( Y приравняем к единице).
Далее приводится таблица с примером
вычисления средних квадратических
погрешностей одного наблюдения и всего
результата.
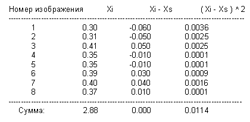
Xs = 2.88 / 8 = 0.360 MX = SQR ( 0.0114 / 8 - 1 ) = 0.040 MXs = 0.040 / SQR ( 8 ) = 0.014 U = ( 0.014 * 100% ) / 0.360 = 3.889% Xsv = 0.360 + 0.014, или: 0.346 <= Xsv <= 0.374
Но, результат получен в относительной линейной мере. Переход к широте в градусах осуществляется по формуле: B = ARCSIN ( X / Y ), а с учетом того, что Y - единичный отрезок: Bs = ARCSIN ( X ) = ARCSIN ( 0.360 ) = 21.1002° = 21° 06.01' Для вычисления средней квадратической погрешности определения широты объекта в градусной мере, воспользуемся выражением описанным в параграфе о прямых и косвенных наблюдениях, принимая во внимание, что Y - константа ( Y = 1 ). Находим производную функции B ( X ): ( dB / dX ) = 1 / SQR ( 1 - X ^ 2 ). Вычисляем погрешность результата наблюдений в градусной мере: MBsv = ( r * MXs ) / SQR ( 1 - Xs ^ 2 ), где r - коэффициент перехода из радианной меры в градусную ( r = 57.2958 ). MBsv = (r * 0.014 ) / SQR ( 1 - 0.360 ^ 2 ) = 0.8598° = 51.59'. U =( 0.8598 * 100% ) / 21.002 = 4.094%
Итог: Средняя вероятная широта образования, зафиксированного на диске Юпитера, составляет: Bsv = 21° 06.01' + 51.59', или: 20°14.42' <= Bsv <= 21°57.60'.
Все описанные в этой статье этапы обработки легко программируются (для нахождения частных производных можно воспользоваться одним из численных методов, например Рунге - Кутта), и поэтому впоследствии не будут отнимать почти никакого времени - необходимо только создать массив или файл исходных данных - значений измеренных величин. Стоит еще добавить, что точностной расчет проведенных измерений помимо своего основного назначения (оценка надежности исследований) имеет еще и другую немаловажную роль. Проводя изо дня в день, из месяца в месяц определенный вид работ, наблюдатель может следить, как в динамике прогрессирует (или регрессирует) достоверность и качество информации, источником которой он является, то есть проводить своеобразный самоконтроль. И будет очень неплохо, если последняя в этой статье фраза в скобках так и останется "закрытой".
5. В технических характеристиках приборов приведены различные данные диапазонов измерения и отображения. В диапазонах измерения наших приборов представлены пределы измерений с учетом внешних активных сопротивлений измерительных проводников стандартной ...