

6.2 Понятие о статических и динамических силах
На рис. 4.2 представлен ротор массой m, выполненный в виде диска, насаженного на вал, который вращается в подшипниках А и В с постоянной угловой скоростью W. Для простоты рассуждения допускается, что главная центральная ось инерции параллельна оси вращения ротора и отстоит от нее на расстоянии ps Пусть к ротору приложены силы Р] и Р2, постоянные по величине и направлению, и пара сил с моментом M(рис. 4.2). Требуется определить давление подшипников на ротор.
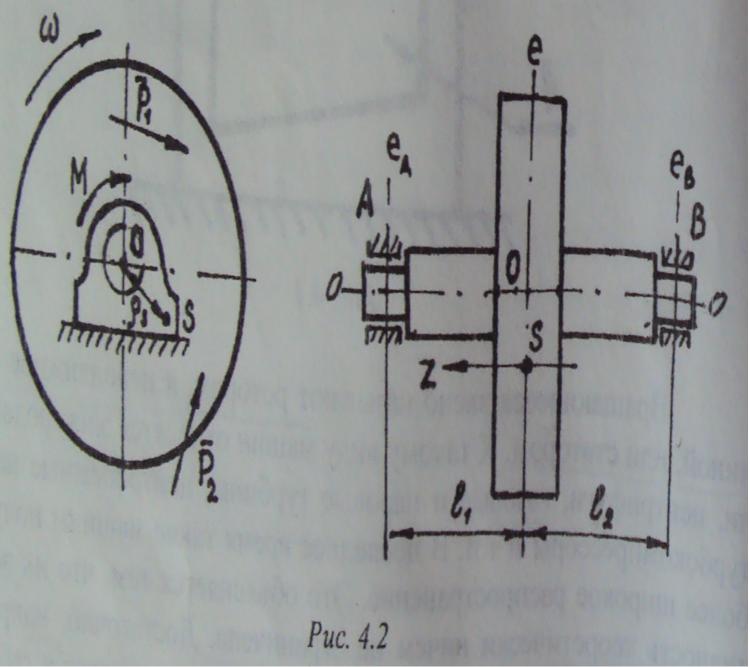
Силы Р, и Р2 переносят в точку О (рис. 4.3). При этом в плоскости е появляются соответствующие пары сил с моментами М, = М(Р,) и М2 = М(Р2). В плоскостях еaА ebв, проходящих через середины подшипников, возникают реакции Q1a и Q1b Действие которых заменяется одной неизвестной силой (Q1, приложенной к точке О. Причем направления сил Q1a Q1b и Q1 показаны условно, а плоскости ea еb и е перпендикулярны оси вращения.
В результате на ротор
будут действовать система сходящихся
сил
P1,
p2
и
Q1
система пар
сил с моментами
M1,M2,M3
результате на ротор
будут действовать система сходящихся
сил
P1,
p2
и
Q1
система пар
сил с моментами
M1,M2,M3
Силы, приложенные в центре О, можно заменить одной равнодействующей:
где = - представляет собой нормальное составляющее ускорения центра масс, которое направляется по ps к центру вращения. Такое же направление будет иметь и R.
Согласно теореме о сложении пар сил, все моменты можно заменить результирующим моментом:
![]()
Поскольку равнодействующая пересекает ось вращения, Mr=0, следовательно, и сумма моментов М1,M2,M3 равна нулю, то есть приложенные пары сил взаимно уравновешиваются, поэтому их можно исключить из рассмотрения.
На основании свойств равнодействующей:
![]()
Графическое решение данного векторного уравнения приведи но на рис. 4.4, что позволяет определить величину и направлений силы Q1
Для нахождения сил давления на ротор со стороны каждого подшипника достаточноQ1 ] разложить на две параллельные силы, определяемые из соотношений
Из многоугольника сил на рис. 4.4 можно заметить, что в нега; входят две категории сил: силы, которые не зависят от вращения ротора(P1 и P2) и силы, обусловленные вращением ротора (сила R), по- этому силу Q1 - давление подшипника на ротор раскладывают на две составляющие:Q1c и R. Составляющие Q1c, Р1 и Р2 образуют треугольник взаимно уравновешивающихся сил, поэтому Q1c можно определить, пользуясь условиями равновесия сил. Эту составляющую называют статической силой давления подшипников на ротор. Итак! статическая сила определяется исключительно приложенными к роте ру силами, не зависящими от характера движения ротора. Она всегда остается постоянной и по величине, и по направлению. К статической силе можно отнести вес ротора, давление между зубьями в зубчатой передаче, силу натяжения ремня в ременной передаче и другое. Чтобы
получил, статическую силу давления на ротор каждого подшипника в отдельности, необходимо Q1c разложить на две параллельные составляющие (рис. 4.5):

В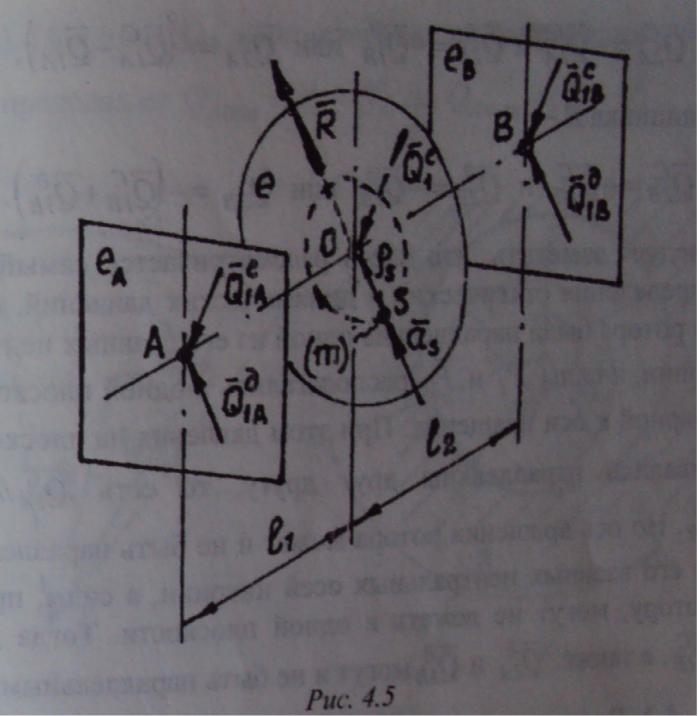 торая
составляющая -
R
=mw2^2ps
- пропорциональна ускорению центра
масс. Если это ускорение сделать равным
нулю, остановить ротор или совместить
ось вращения с его главной центральной
осью инерции, то и
R
окажется равной нулю. При вращении
ротора с Угловой скоростью
w
вектор
R
вращается вместе с ротором с той же
угловой скоростью. Вызванная
неуравновешенностью ротора составляющая
торая
составляющая -
R
=mw2^2ps
- пропорциональна ускорению центра
масс. Если это ускорение сделать равным
нулю, остановить ротор или совместить
ось вращения с его главной центральной
осью инерции, то и
R
окажется равной нулю. При вращении
ротора с Угловой скоростью
w
вектор
R
вращается вместе с ротором с той же
угловой скоростью. Вызванная
неуравновешенностью ротора составляющая
н![]() азывается
силой
динамического давления
подшипников на ротор. Она для каждого
подшипника в отдельноcти(рис.
4-5) будет находиться но формулам
азывается
силой
динамического давления
подшипников на ротор. Она для каждого
подшипника в отдельноcти(рис.
4-5) будет находиться но формулам
![]() Давления
ротора на подшипники численно равны
давлениям подшипников на
ротор
но направлены в противоположную сторону,
следует, что для подшипника
А
имеет место соотношение
Давления
ротора на подшипники численно равны
давлениям подшипников на
ротор
но направлены в противоположную сторону,
следует, что для подшипника
А
имеет место соотношение
С
![]() ледует
заметить, что здесь рассматривается
самый простой случай определения
статических и динамических давлений,
когда ось вращения ротора была параллельна
одной из его главных центральной осей
инерции, а силы Р1 и
Р2
располагались в одной плоскости,
перпендикулярной к оси вращения. При
этом давления на плоскостях
еА
| ев
оказывались параллельны друг другу, то
есть
ледует
заметить, что здесь рассматривается
самый простой случай определения
статических и динамических давлений,
когда ось вращения ротора была параллельна
одной из его главных центральной осей
инерции, а силы Р1 и
Р2
располагались в одной плоскости,
перпендикулярной к оси вращения. При
этом давления на плоскостях
еА
| ев
оказывались параллельны друг другу, то
есть
![]() ось
вращения ротора может и не быть
параллельной ни одной из его главных
центральных осей инерции, а силы,
приложенные к ротору, могут не лежать
в одной плоскости. Тогда давление
ось
вращения ротора может и не быть
параллельной ни одной из его главных
центральных осей инерции, а силы,
приложенные к ротору, могут не лежать
в одной плоскости. Тогда давление
![]() могут
и не быть параллельными 4.2. Режимы
движения цапфы в подшипнике
могут
и не быть параллельными 4.2. Режимы
движения цапфы в подшипнике
Для определения полного давления подшипника на цапфу ротора необходимо статическое давление геометрически сложить с динамическим:
![]() В
зависимости от значений Qэи
Qе
возможны три случая, которые приводятся
ниже для подшипника
А.
В
зависимости от значений Qэи
Qе
возможны три случая, которые приводятся
ниже для подшипника
А.
![]()
Вектор Qеa статического давления остается неизменным а вектор Qэа динамического давления вращается вместе с ротором с той I же угловой скоростью, что и ротор. Поэтому вектор Qa представляющий их геометрическую сумму, будет поворачиваться вокруг точки р в пределах некоторого угла альфа то в одну, то другую сторону (рис. 4.6а). При этом Qa изменяется как по направлению, так и по величине в пределах от
![]()
У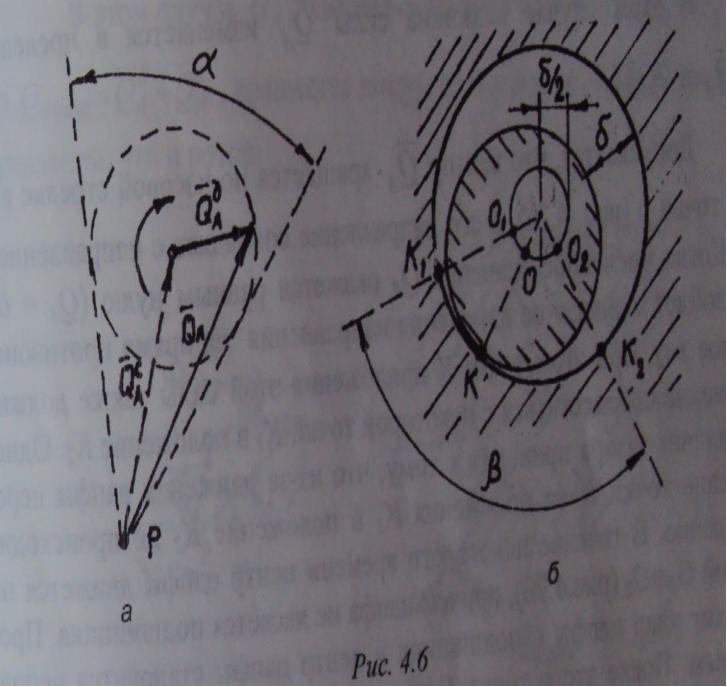 читывая
трение скольжения при движении цапфы
в подшипниках, силу QА
следует направить по касательной к
кругу трения (см. 2.1.2). Тогда вектор Qa
будет совершать колебательное движение
читывая
трение скольжения при движении цапфы
в подшипниках, силу QА
следует направить по касательной к
кругу трения (см. 2.1.2). Тогда вектор Qa
будет совершать колебательное движение
в пределах угла альфа, а точка К касания цапфы с подшипником - по определенной дуге. Однако эти рассуждения справедливы для случая, когда отсутствуем зазор между цапфой и подшипником. В действительности же диаметр цапфы всегда меньше внутреннего диаметра подшипника на величину б (рис. 4.66), поэтому перемещение точки К влечет за собою к перемещение центра О цапфы. При этом точка К будет двигаться по дуге К1КК2 а точка О - по дуге О1ОО2 радиуса б/2. Причем угол Бэта который стягивается этими дугами, отличается от, угла альфа. Этот режим называется режимом колебательного движения, или первым режимом. При таком движении подшипник изнашивается в зоне соприкосновения с цапфой, то есть с одной стороны, а цапфа - кругом,