

5.3.2.0Пределенне сил в кулачковом механизме с тарельчатым толкателем
На рис. 5.10 рассматриваются силы, действующие на толкатель, оканчивающийся плоской тарелкой. В этом случае угол давления б кулачка на толкатель принимают равным углу трения фи То есть б= фи так как между кулачком и толкателем происходит трение скольжения. Поскольку в кулачковых механизмах исследование кинематики ведется методом обращенного движения (кулачок останавливают и начинают перемещать толкатель вокруг центра вращения кулачка с угловой скоростью W), сила давления Qbв кулачка на толкатель отклоняется от нормали на угол Фи
против перемещения толкателя относительно кулачка. Следовательно, направление силы Qb зависит от направления вращения кулачка.
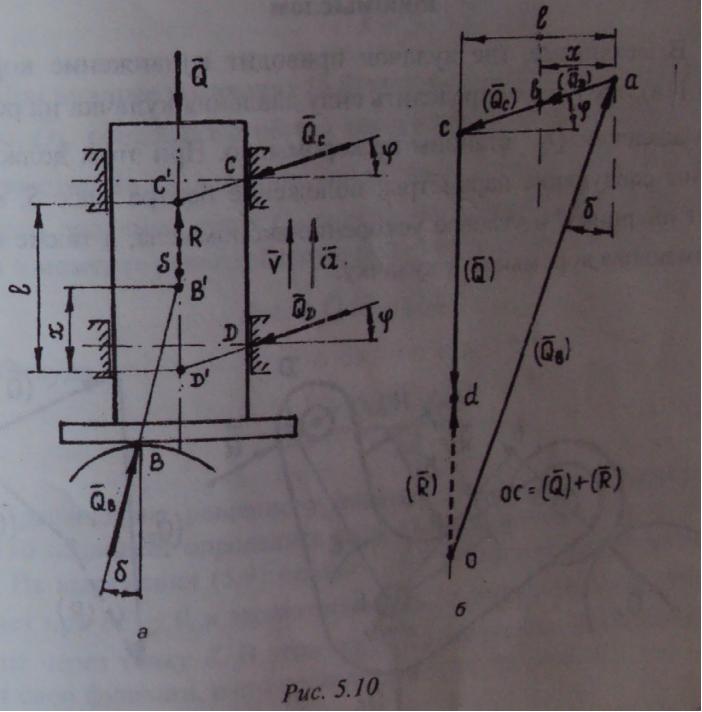
Расчет сил Qb Qс и Qd производят по вышеприведенной методике по формулам (5.5) и (5.6) при б=фи
На рис. 5.106 представлено графическое решение уравнения (5.1) применительно к данной схеме механизма. В случае когда линия действия силы Qb пересекает ось симметрии толкателя (точка В)
ниже точки C' план сил ничем не отличается от плана, показанного на рис. 5.96.
При конструировании кулачковых механизмов этого типа следует добиваться того, чтобы коэффициент трения f и отношением x/l удовлетворяли условиям
и![]() наче
возможно самоторможение механизма.
наче
возможно самоторможение механизма.
5.3.3. Определение сил в кулачковом механизме с роликом и коромыслом
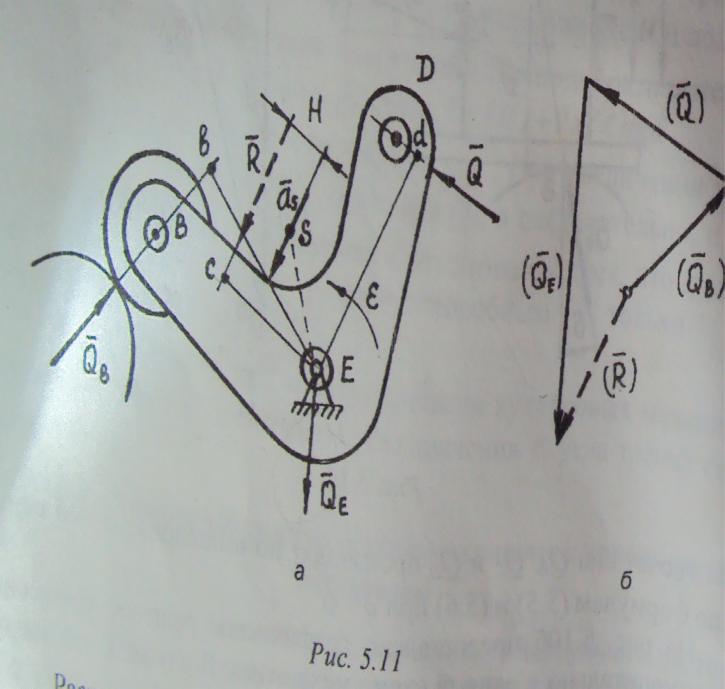
В механизме, где кулачок приводит в движение коромысло (рис. 5.11а), требуется определить силу давления кулачка на ролик Qb и силу давления QE станины на коромысло. При этом должны быть известны следующие параметры: положение центра масс S, масса m, момент инерции J и угловое ускорение E коромысла, а также сила прижимающая коромысло к кулачку.
 Расчет
сил в кулачковых механизмах данного
типа ведется по аналогии с силовым
анализом в плоских шарнирно-рычажных
механизмах (разд. 3.3). Равнодействующая
R
= M*As
сил,
приложенных к коромыслу отстает от
центра масс
S
на расстояние
Расчет
сил в кулачковых механизмах данного
типа ведется по аналогии с силовым
анализом в плоских шарнирно-рычажных
механизмах (разд. 3.3). Равнодействующая
R
= M*As
сил,
приложенных к коромыслу отстает от
центра масс
S
на расстояние
и направляется по ускорению а5.
направляется по ускорению а5.
В этом случае
![]()
При анализе уравнения (5.8) можно отметить, что линия действия силы Qb совпадает с общей нормалью кулачка и ролика, а сила QE неизвестна ни по величине, ни по направлению. Для определения численного значения силы Qв можно воспользоваться теоремой Вариньона о моменте равнодействующей относительно точки Е
 Графическое
решение уравнения (5.8),
которое
показано на рис, 5.116 позволяет определить
силу QE
и по величине, и по направлению. Из
выражения (5.9) следует, что самоторможение
механизма наступает при
ЬЕ = 0,
а это возможно, если линия действия силы
Qbв
проходит
через точку
Е.
В этом случае кулачковый механизм не
выполняет свои функции, и его исследование
теряет смысл.
Графическое
решение уравнения (5.8),
которое
показано на рис, 5.116 позволяет определить
силу QE
и по величине, и по направлению. Из
выражения (5.9) следует, что самоторможение
механизма наступает при
ЬЕ = 0,
а это возможно, если линия действия силы
Qbв
проходит
через точку
Е.
В этом случае кулачковый механизм не
выполняет свои функции, и его исследование
теряет смысл.
4. ДВУХЗВЕННЫЕ РОТАЦИОННЫЕ МЕХАНИЗМЫ
Двухзвенные ротационные механизмы по классификации Ассура-Артоболевского относятся к механизмам первого класса и состоят всего лишь из двух, звеньев: вращающегося звена 1 и неподвижного звена 2 (рис. 4.1).
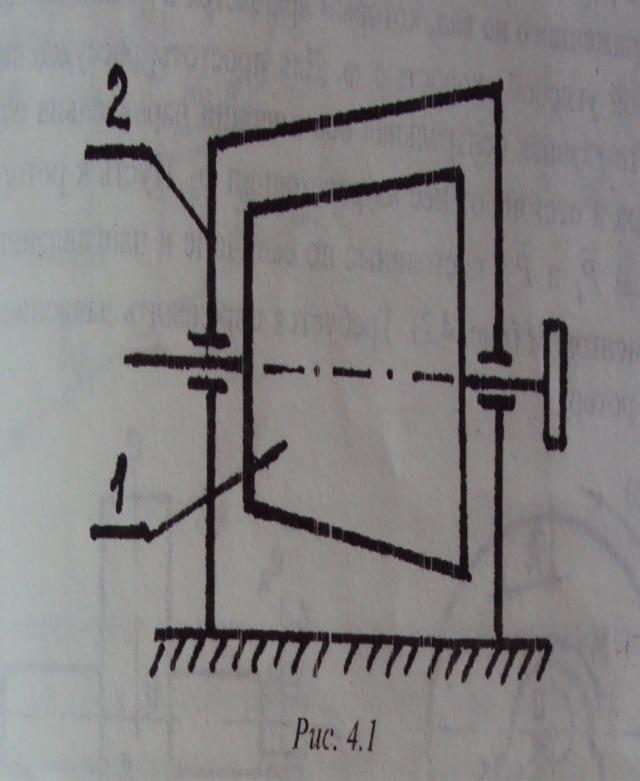 Вращающееся
звено называют ротором, а неподвижное
- станиной, или статором. К такому виду
машин относятся электродвигатели,
центрифуги, газовые и паровые турбины,
центробежные насосы, турбокомпрессоры
и т.п. В последнее время такие машины
получают более широкое распространение.
Это объясняется тем, что их эффективность
теоретически ничем не ограничена.
Достаточно, например, увеличить скорость
вращения ротора, как при том же весе и
габарите машины повышается ее
производительность. Следовательно,
основное их преимущество заключается
в том, что они позволяют реализовать
большие мощности в довольно компактных
установках, что весьма трудно, а иногда
невозможно осуществить при помощи
поршневых машин. Второе преимущество
- простота конструкции. Итак, простота
конструкции, эффективность и надежность
ротационных машин делают их перспективными
на современном этапе.
Вращающееся
звено называют ротором, а неподвижное
- станиной, или статором. К такому виду
машин относятся электродвигатели,
центрифуги, газовые и паровые турбины,
центробежные насосы, турбокомпрессоры
и т.п. В последнее время такие машины
получают более широкое распространение.
Это объясняется тем, что их эффективность
теоретически ничем не ограничена.
Достаточно, например, увеличить скорость
вращения ротора, как при том же весе и
габарите машины повышается ее
производительность. Следовательно,
основное их преимущество заключается
в том, что они позволяют реализовать
большие мощности в довольно компактных
установках, что весьма трудно, а иногда
невозможно осуществить при помощи
поршневых машин. Второе преимущество
- простота конструкции. Итак, простота
конструкции, эффективность и надежность
ротационных машин делают их перспективными
на современном этапе.
Обычно полагают, что ось ротора совершает вращательные движение. Но более глубокое изучение показывает, что в действительности она совершает сложное движение. Это объясняется наличием зазоров в подшипниках и характером приложенных к ротору сил.