

5.3. Силовой анализ кулачковых механизмов
Силовой анализ кулачковых механизмов заключается в определении сил взаимодействия между его звеньями. Знание о величинах и характере действия этих сил необходимо для проведения прочностных расчетов деталей, для определения энергозатрат, необходимых при работе механизма, и для определения КПД. Методика и последовательность силового расчета кулачковых механизмов в основном зависит от их конструктивных особенностей и может быть выполнена! если известны геометрические и конструктивные размеры механизма, скорости и ускорения толкателя, массы звеньев, а также моменты! инерции масс звеньев, совершающих вращательные движения.
53.1. Определение сил в кулачковом механизме с роликом и толкателем
На рис. 5.9а представлен кулачковый механизм с толкателем, 1 оканчивающийся роликом. Необходимо определить силы, действующие на толкатель в заданном его положении.
В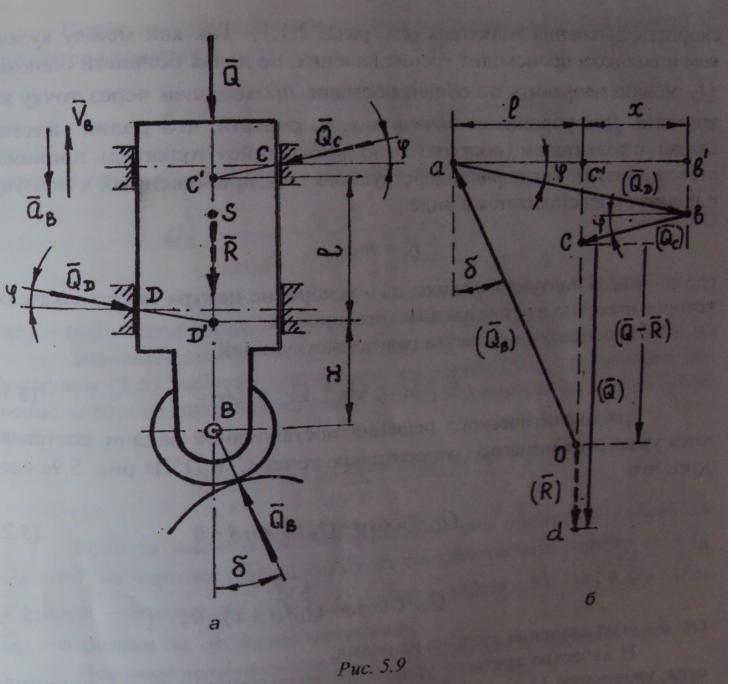 водятся
следующие обозначения сил: Q-
известная сила, прижимающая толкатель
к кулачку, направленная вдоль прямой
C'D',
по
которой двигается общий центр масс S
толкателя и ролика; QС
водятся
следующие обозначения сил: Q-
известная сила, прижимающая толкатель
к кулачку, направленная вдоль прямой
C'D',
по
которой двигается общий центр масс S
толкателя и ролика; QС
QD- силы реакции станины; QB сила давления кулачка на ролик. Силы QС ИQD- и можно считать приложенными в серединах поверхностей соприкосновения толкателя с опорой (в точках D и С). Эти силы отклоняются от общей нормали к поверхностям опор на угол трения фи, не превышающий угол в момент начала скольжения, против скорости движения толкателя (см. разд. 2.1.1). Так как между кулачком и роликом происходит трение качения, не делая большой ошибки, QВ можно направить по общей нормали, проходящей через точку их контакта. Дня упрощения задачи можно считать, что ролик жестко связан с толкателем (поступательно движущийся толкатель принимается за ползун). Тогда равнодействующая сил, приложенных к ползуну и ролику, представляется в виде
г![]() де
т -
масса ползуна и ролика, Aв
- ускорение центра масс толкателя,
которое известно из кинематического
анализа.
де
т -
масса ползуна и ролика, Aв
- ускорение центра масс толкателя,
которое известно из кинематического
анализа.
На основании свойства равнодействующей
![]()
(5.1)
Для аналитического решения поставленной задачи составляются уравнения моментов относительно точек С'иD' рис. 5.9а следует, что
где б- угол давления кулачка на ролик.
В качестве третьего уравнения, связывающие силы, принимается уравнение (5Л), спроектированное по направлению ускорения
ав ,то есть
П осле
подстановки последнего соотношения в
формулу (5.4), получится уравнение
осле
подстановки последнего соотношения в
формулу (5.4), получится уравнение
 решение
которого приводит к определению Qb
решение
которого приводит к определению Qb
где f=tg фи - коэффициент трения скольжения.
Значения сил Qc и Qdпри известном Qb можно находить по формулам (5.5) либо из векторного уравнения (5.1), графическое решение которого показано на рис. 5.96. Из выражений (5.2) и (5.3) следует, что
 Если за
масштабный коэффициент сил принять
К
(н/мм), то Qb*sin(b)в
на чертеже (рис. 5.96) будет соответствовать
отрезку
ас'=l';
Qd*cos(Фи)
-
отрезку
ab'=l+x
Qc*cos(фи)-отрезку
b'c'=x,
а
Qc,Qb,Qd
-
отрезкам
оа, аЬ, Ьс
соответственно.
Если за
масштабный коэффициент сил принять
К
(н/мм), то Qb*sin(b)в
на чертеже (рис. 5.96) будет соответствовать
отрезку
ас'=l';
Qd*cos(Фи)
-
отрезку
ab'=l+x
Qc*cos(фи)-отрезку
b'c'=x,
а
Qc,Qb,Qd
-
отрезкам
оа, аЬ, Ьс
соответственно.
Искомые величины сил Qd,Qc,Qb находят из соотношений
Qв = Коа; Qd = КаЬ; Qс=Kdс, а силы Q и R на чертеже пропорциональны отрезкам cd и od

Следовательно, многоугольник оаbcd представляет собой план сил, выполненных в масштабе
В случае когда R будет иметь противоположное направление,
![]()
Из соотношения (5.6) следует, что при
![]() реакции
Qb,Qc,Qd
неограниченно возрастают. Такая же
картина наблюдается, когда точки О и С
(рис, 5.96) совпадут и согласно выражению
(5.7) К=оо,
следовательно, Qb=оо,
Qc=оо,
Qd=oo.
Это указывает на невозможность движения
толкателя, то есть при этом возникает
явление
самоторможения
механизма. Подобное явление возможно
в трех случаях (по трем параметрам): 1
реакции
Qb,Qc,Qd
неограниченно возрастают. Такая же
картина наблюдается, когда точки О и С
(рис, 5.96) совпадут и согласно выражению
(5.7) К=оо,
следовательно, Qb=оо,
Qc=оо,
Qd=oo.
Это указывает на невозможность движения
толкателя, то есть при этом возникает
явление
самоторможения
механизма. Подобное явление возможно
в трех случаях (по трем параметрам): 1
По углу давления б. При угле давления, удовлетворяющей условию tgб-f(1+2x/l)sinб=0 кулачковый механизм не работает,по этому при конструировании необходимо добиваться, чтобы tgб<1f(1+2х/l).
По коэффициенту трения скольжения f или углу трения W Если f<1/(1+2х/1)tgб, то возникает самоторможение. Отсюда следует, что при конструировании необходимо так подобрать материал! трущихся тел, чтобы выполнить условие f<1/(1+2х/l)tgб.
По геометрическим размерам х и I. При увеличении х/l до величины х/l=(1-f-tgб)/(2f tgб) сила Qb следовательно, и сил Qd и Qc будут бесконечно большими. Из этого следует, что кулачковый механизм будет работоспособным только при х/l<(1-f tgб)/(2f Tgб).
Таким образом, при конструировании кулачковых механизмом нужно стремиться к уменьшению угла давления б, угла трения скольжения фи и x/l.