

5. Кулачковые механизмы
Кулачковый механизм представляет собой механизм, имеющий в своем составе высшую кинематическую пару, одно из звеньев которой выполнено в виде диска с криволинейным очертанием
Кулачковые механизмы применяются в случаях, когда перемещение скорость и ускорение ведомого звена должны изменяться по заранее заданному закону Кулачковые механизмы подразделяются на две основные группы: плоские, у которых кулачок и толкатель перемещаются в одной или параллельных плоскостях, и пространственные, у которых эти звенья перемещаются в не параллельных плоскостях.
5.1. Общие сведения о плоских кулачковых механизмах и их классификация
П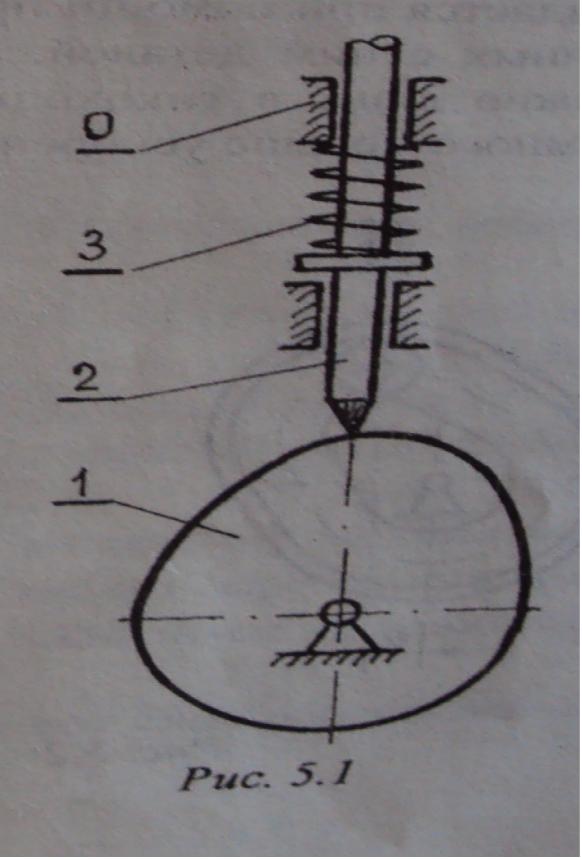 ростейший
кулачковый механизм (рис.
5.1)
состоит из трех звеньев:
кулачка
1, который является ведущим звеном,
образующего со
стойкой
О
низшую кинематическую пару,
толкателя
2
- ведомого звена, образующего
с кулачком
высшую, а со стойкой низшую
пару.
Иногда на конце толкателя
2 устанавливается
ролик для замены трения скольжения
в паре кулачок - толкатель "фением
качения.
Поскольку наличие ролика
не изменяет
законы движения звеньев, то
кулачковые
механизмы относятся к трехзвенным
механизмам с одной степенью
подвижности (W=1)
ростейший
кулачковый механизм (рис.
5.1)
состоит из трех звеньев:
кулачка
1, который является ведущим звеном,
образующего со
стойкой
О
низшую кинематическую пару,
толкателя
2
- ведомого звена, образующего
с кулачком
высшую, а со стойкой низшую
пару.
Иногда на конце толкателя
2 устанавливается
ролик для замены трения скольжения
в паре кулачок - толкатель "фением
качения.
Поскольку наличие ролика
не изменяет
законы движения звеньев, то
кулачковые
механизмы относятся к трехзвенным
механизмам с одной степенью
подвижности (W=1)
Кулачковые механизмы дают возможность получить требуемый, наперед Данный закон движения толкателя. Благодаря этому свойству они получили широкое распространение в машиностроении. Так кулачковые механизмы применяются Для привода клапанов двигателя, для размыкания контактов магнето и контролера управления технологическим процессом в автоматических линиях и т.п. В то же время кулачковые механизмы обладают и существенными недостатками, связанными с наличием высшей кинематической пары, когда контакт звеньев (кулачок и толкатель) теоретически осуществляется в точке или по линии. Вследствие этого в точке их касания удельное давление достигает значительного уровня, что приводит к износу элементов высшей пары, поэтому для уменьшения этого износа элементы высших пар должны быть изготовлены из высококачественных материалов и обработаны особым способом. Это ограничивает применение кулачковых механизмов в отношении величины допустимых нагрузок.
Кроме износа звеньев, их недостатком является необходимость обеспечить постоянное соприкосновение между звеньями, образующими высшую кинематическую пару, для осуществления заданного движения толкателя. Это достигается либо силовым, либо геометрическим (кинематическим) замыканием.
Силовое замыкание заключается в том, что толкатель во всех положениях прижимается к кулачку с определенной силой, которая создается при помощи пружины 3 (рис. 5.1) или веса толкателя и связанных с ним деталей. Замыкание посредством веса толкателя возможно лишь в тихоходных механизмах, когда ускорение толкателя намного меньше ускорения сил тяжести.

Рис. 5.2
В качестве кинематического замыкания выступает механизм с пазовым кулачком (рис. 5.2). При подобном устройстве ролик, во избежание заклинивания, должен быть по диаметру несколько меньше ширины паза, что приводи! к появлению люфта, а следовательно, к ударным нагрузкам на толкатель при перемене направления движения толкателя.
К числу недостатков кулачковых механизмов можно также отнести сложность изготовления профиля кулачка.
Кулачковые механизмы весьма разнообразны как по виду движения ведущего и ведомого звеньев, так и по конструктивному их выполнению. В зависимости от этих признаков они могут быть классифицированы следующим образом:
1) по виду движения кулачка кулачковые механизмы бывают: вращающимися (рис. 5.3а) и качающимися (рис. 5.36) кулачками, которые совершают движение по закону ФИ1=Фи(t), а также поступательно движущимися по закону St=St(t) (рис. 5.3в);

2) по виду движения толкателя кулачковые механизмы делятся на три типа:
механизмы, толкатели которых совершают возвратно-вращательные (колебательные) движения по закону ФИ2=ФИ2(t) (рис. 5.4а), обычно их называют коромысловыми кулачковыми механизмами;
механизмы, толкатели которых совершают прямолинейные возвратно-поступательные движения по закону S2=S2(t) (рис. 5.46); дня таких кулачковых механизмом различают аксиальные механизмы, у которых направление движении Толкателя проходит через центр врaщения кулачка (рис.5.1) и дезаксиальные со смещением на величину дезаксажа e (рис. 5.2);
механизмы, толкатели которых совершают сложное движение (рис. 5.4в);

3) по профилю рабочей поверхности толкателя, соприкасающейся профиля кулачка, кулачковые механизмы делят.
а) остроконечные(игольчатые); б) роликовые (цилиндрические);в) тарельчатые (плоские); г) сферические, соответственно.

Кулачковые механизмы в основном являются преобразующими механизмами , и в зависимости от сочетания типов кулачка и толкателя возможны следующие наиболее распространенные преобразования движений:
вращательное движение кулачка (рис. 5.3а) преобразуется в колебательное (возвратно-вращательное) движение толкателя (рис. 5.4а);
вращательное движение кулачка (рис. 5.3а) преобразуется в [возвратно-поступательные движение толкателя (рис. 5.46);
возвратно-поступательное движение кулачка (рис. 5.3в) преобразуется в колебательное (возвратно-вращательное) движение толкателя (рис. 5.4а); 1
возвратно-поступательное движение кулачка (рис. 5.3в) преобразуется в возвратно-поступательное движение толкателя (рис. 5.4б).
5.2. Кинематический анализ кулачковых механизмов
Кинематическое исследование механизмов включает в себя:
построение плана механизма и диаграммы положений толкателя, при этом заданы размеры кулачкового механизма, профиль кулачка и конструкция толкателя;
определение скоростей и ускорений выходного звена, а также сил, действующих на толкатель.
Скорости и ускорения толкателя
Определение скоростей и ускорений может быть выполнено на основе общих формул кинематики. Однако гораздо удобнее провести замену кулачкового механизма некоторым другим механизмом, включающим только низшие кинематические нары и обеспечивающим такие же соотношения между скоростями и ускорениями соответствующих точек его звеньев, заменяющим механизмом (см. разд. 1.6).
Ниже рассматриваются несколько примеров кинематического исследования наиболее распространенных кулачковых механизмов при помощи заменяющих механизмов.
А) кулачковый механизм с роликом и коромыслом На представленном механизме (рис. 5.6а) точка А, которая лежит на нормали ли, является центром кривизны рассматриваемого участка аЬ. Пока ролик радиусом 1 катится по дуге аЬ, расстояние AВ будет оставаться неизменным, так как АВ = r1+r2 поэтому, не нарушая движения звеньев кулачкового механизма, к нему можно присоединить дополнительное звено (шатун), связав его шарнирами А и В с кулачком и коромыслом. Из этого следует, что траектория движения точки В кулачкового механизма не отличается от траектории движения точки В заменяющего механизма ОАВС (рис. 5.66), а ее скорость и ускорение находятся из решения векторных уравнений:

Р ис.
5.6
ис.
5.6
Исследование этих уравнений описано для шарнирного четырехзвенника и приведено в разд. 3.2.
б) кулачковый механизм с тарельчатым толкателем
Кулачок упирается в плоскую тарелку, совершающую возвратно-поступательное движение (рис. 5.7а). Пока точка касания кулачка и тарелки лежит на дуге аЬ радиусом r1, центр кривизны А этой дуги будет находиться на постоянном расстоянии от тарелки, поэтому траектории движения звеньев не изменятся, если к тарелке прикрепить ползун с кулисой так, чтобы ее прорезь была параллельна тарелке. Тогда скорость и ускорение толкателя могут быть определены как скорость и ускорение точки В в кулисном механизме с поступательно движущейся кулисой (рис. 5.76) графическим решением векторных уравнений:
![]() где
ак=0
ускорение Кориолиса.
где
ак=0
ускорение Кориолиса.
 в)
кулачковый
механизм с поступательно движущимся
кулачком.
в)
кулачковый
механизм с поступательно движущимся
кулачком.
На рис. 5.8а показан механизм, кулачок которого совершает возвратно-поступательное движение. Участок аЬ кулачка представляет собой дугу окружности с центром В, который лежит на нормали пп и при движении кулачка будет перемещаться по траектории mm. Пока ролик катится по дуге аЬ, расстояние от центра В до центра ролика А радиусом г2 остается постоянным, то есть АВ= r1+r2: поэтому, не изменяя движение звеньев кулачкового механизма (рис. 5.8а), к нему можно присоединить дополнительное звено АВ (шатун), связав его шарнирами В и А с кулачком и коромыслом соответственно, а кулачок заменить ползуном. При этом движение точки А кулачкового механизма не будет отличаться от движения точки А механизма с ползуном и коромыслом (рис. 5.86). Следовательно, для определения скоро- и ускорений звеньев данного кулачкового механизма достаточно определить скорости и ускорения точек звеньев заменяющего механизма из решения векторных уравнений:

